






 本文介绍了图像处理中的梯度计算方法,如Sobel、Scharr和Laplacian算子,用于检测图像的边缘和变化。此外,还涉及了轮廓拟合,包括boundingRect和approxPolyDP,用于提取和近似轮廓。同时,文章涵盖了模板匹配技术以及傅里叶变换在图像模糊和高频信息提取中的应用。
本文介绍了图像处理中的梯度计算方法,如Sobel、Scharr和Laplacian算子,用于检测图像的边缘和变化。此外,还涉及了轮廓拟合,包括boundingRect和approxPolyDP,用于提取和近似轮廓。同时,文章涵盖了模板匹配技术以及傅里叶变换在图像模糊和高频信息提取中的应用。
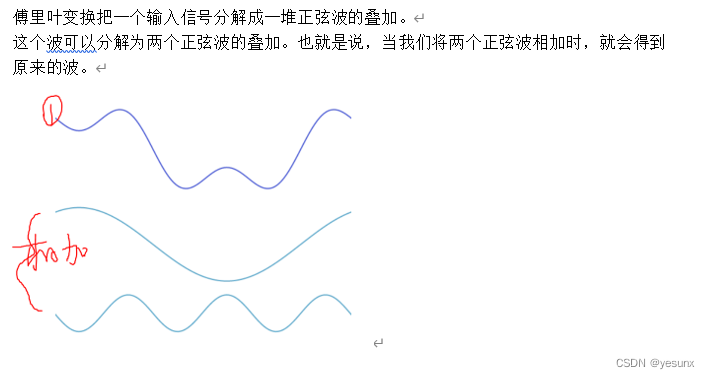
图像的梯度计算,一般使用Sobel算子来实现,Sobel算子是通过像素图的横轴和纵轴分别计算各自的梯度,然后再统一计算出当前每个像素点的梯度,除了Sobel算子,还有对Sobel算子升级后的Scharr 算子和 Laplacian算子。
#图像梯度,如何计算图像中的梯度,比如图像两边颜色差异大时;需要考虑Gx和Gy,即水平和竖直的梯度
sobel算子
sobelx = cv2.Sobel(img, cv2.CV_64F, 1, 0 , ksize=3)
sobelx = cv2.convertScaleAbs(sobelx) #加绝对值,防止负数变成0
cv2.imshow('sobelx', sobelx)
sobely = cv2.Sobel(img, cv2.CV_64F, 0, 1, ksize=3)
sobely = cv2.convertScaleAbs(sobely) #加绝对值,防止负数变成0
cv2.imshow('sobely', sobely)
#求和
sobelxy = cv2.addWeighted(sobelx, 0.5, sobely, 0.5, 0)
cv2.imshow('sobelxy', sobelxy)
#scharr算子
cv2.Scharr()
#laplacian算子
cv2.Laplacian()
-
-
-
-
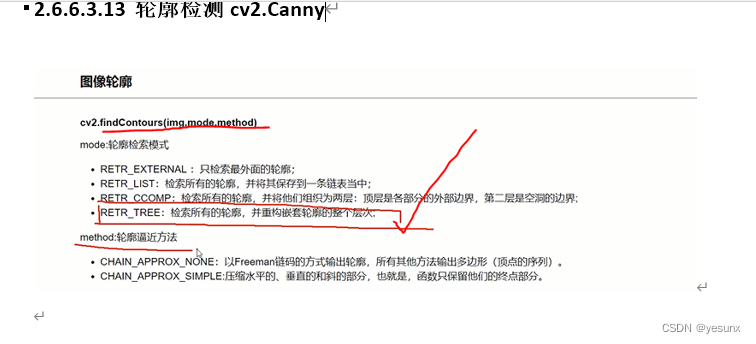
- 轮廓拟合boundingRect/approxPolyDP
-
-
-
boundingRect计算轮廓的垂直边界最小矩形,矩形是与图像上下边界平行的。
#遍历每一个轮廓
for (i,c) in enumerate(refCnts):
(x,y,w,h) = cv2.boundingRect(c) #用矩形去覆盖轮廓
roi = ref[y:y+h,x:x+w] #从原图中找到对应的区域,截取保存
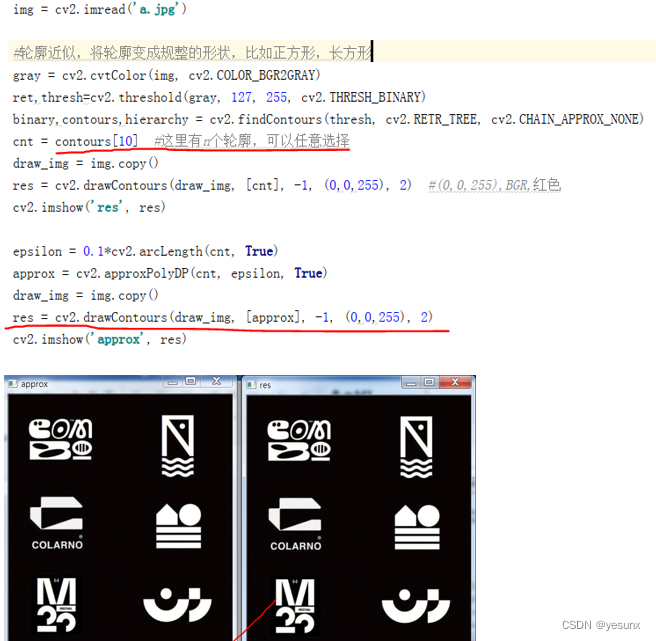
approx.PolyDP对不像轮廓点进行多边形拟合。
# 遍历轮廓
for c in cnts:
# 计算轮廓近似
peri = cv2.arcLength(c, True)
# C表示输入的点集
# epsilon表示从原始轮廓到近似轮廓的最大距离,它是一个准确度参数
# True表示封闭的
approx = cv2.approxPolyDP(c, 0.02 * peri, True) #近视
# 4个点的时候就拿出来
if len(approx) == 4: #从图片可以找到很多轮廓,但是只有那个最大的是四边形,这里有点硬编码的感觉
screenCnt = approx
break
-
-
-
-
- 模板匹配cv2.matchTemplate
-
-
-
#模板匹配,从目标图片中找到和模板最像的部分
# template = cv2.imread('template.jpg')
# h,w = template.shape[:2]
# res = cv2.matchTemplate(img, template, cv2.TM_SQDIFF_NORMED)
# print(res.shape)
# cv2.imshow('res', res)
#
# methods = ['cv2.TM_SQDIFF','cv2.TM_SQDIFF_NORMED','cv2.TM_CCOEFF','cv2.TM_CCOEFF_NORMED']
# #这就是图像识别
# for meth in methods:
# img2 = img.copy()
# method = eval(meth)
# print(method)
# #res就是匹配结果,返回每个窗口的结果值,图像中最亮的点就是最相似的地方
# res = cv2.matchTemplate(img, template, method)
#
# min_val,max_val,min_loc,max_loc=cv2.minMaxLoc(res)
#
# #如果是平方差匹配或归一化平方差匹配,取最小值
# if method in [cv2.TM_SQDIFF, cv2.TM_SQDIFF_NORMED]:
# top_left = min_loc
# else:
# top_left = max_loc
#
# bottom_right = (top_left[0] + w, top_left[1] + h)
#
# #画矩形
# cv2.rectangle(img2, top_left, bottom_right, 255, 2)
# plt.subplot(121), plt.imshow(res, 'gray')
# plt.xticks([]), plt.yticks([]) # 隐藏坐标
# plt.subplot(122), plt.imshow(img2, 'gray')
# plt.xticks([]), plt.yticks([]) #隐藏坐标
# plt.suptitle(meth)
# plt.show()
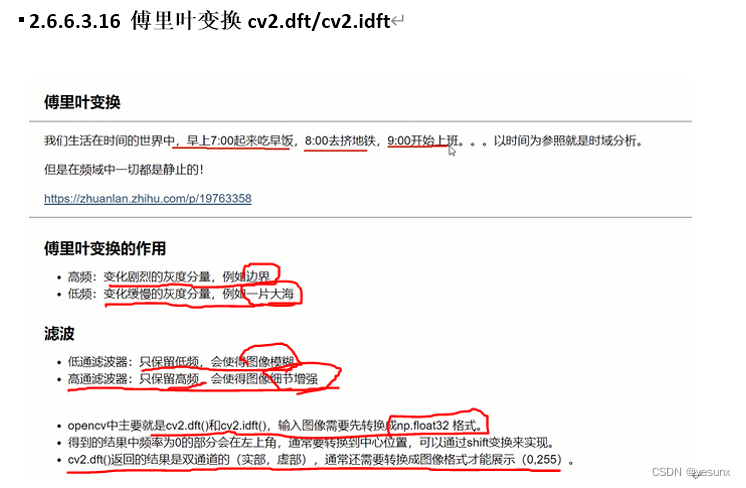
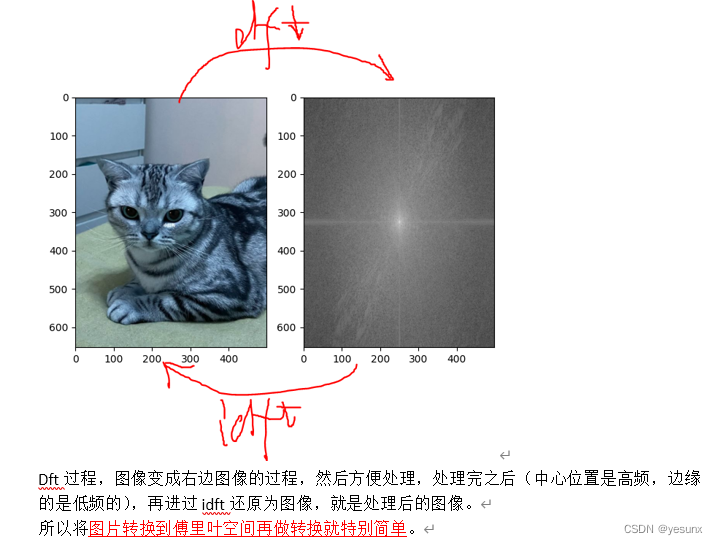
高频和低频从图像上一眼看出。
过滤掉高频,就剩下低频;其实就是变模糊了;
过滤掉低频,就剩下高频,其实就剩下边界了;
所以傅里叶变换在图像中的处理本质上就是讲图像映射到屏域中进行处理,这样更简单更高效。达到图片模糊和保留边界的效果。
#傅里叶变换
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) #灰度图
img_float32 = np.float32(gray)
dft = cv2.dft(img_float32, flags=cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)
# magnitude_spectrum = 20*np.log(cv2.magnitude(dft_shift[:,:,0], dft_shift[:,:,1]))
# plt.subplot(121), plt.imshow(img,cmap='gray')
# plt.subplot(122), plt.imshow(magnitude_spectrum, cmap='gray') #这里就是
# plt.show()
rows,cols = img.shape[:2]
crow,ccol = int(rows/2), int(cols/2) #中心位置
#低通滤波
mask = np.ones((rows, cols, 2), np.uint8)
mask[crow-30:crow+30, ccol-30:ccol+30] = 0
fshift = dft_shift*mask #利用mask处理,过滤
#IDFT 还原图片
f_ishift = np.fft.ifftshift(fshift)
img_back = cv2.idft(f_ishift)
img_back = cv2.magnitude(img_back[:,:,0], img_back[:,:,1])
plt.subplot(121), plt.imshow(img, cmap='gray')
plt.subplot(122), plt.imshow(img_back, cmap='gray')
plt.show()




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











