




 本文介绍了如何通过DH参数表来解析KUKA机械臂的正向运动学,并提供了具体的步骤指导。从alpha、a、d、theta等参数的求解方法,到使用URDF文件和TF转换来验证结果,本文为读者提供了完整的解决方案。
本文介绍了如何通过DH参数表来解析KUKA机械臂的正向运动学,并提供了具体的步骤指导。从alpha、a、d、theta等参数的求解方法,到使用URDF文件和TF转换来验证结果,本文为读者提供了完整的解决方案。
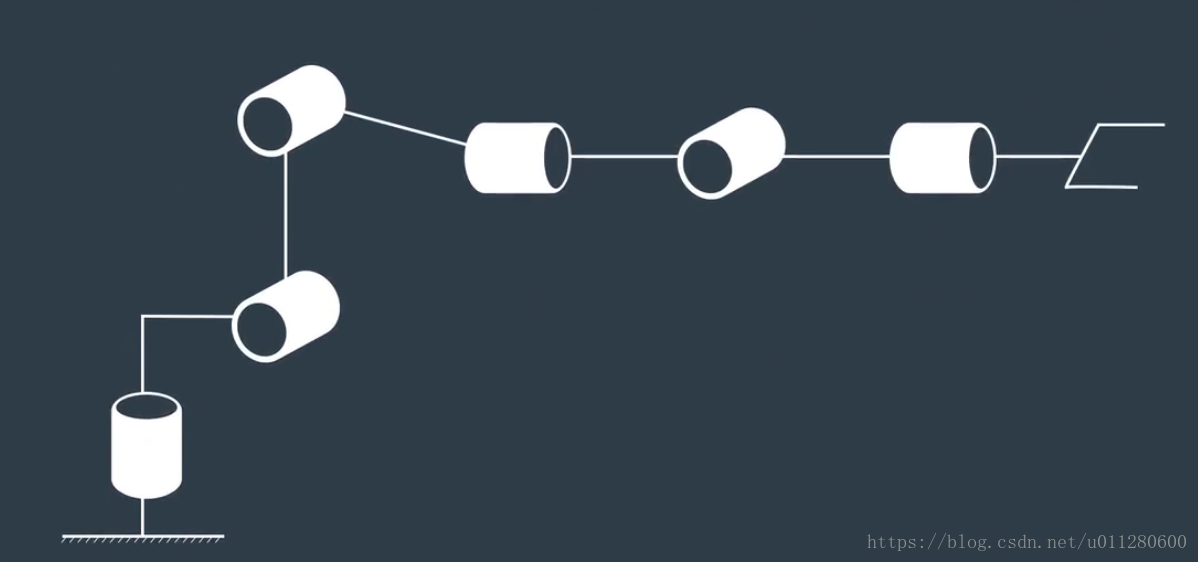
step1:
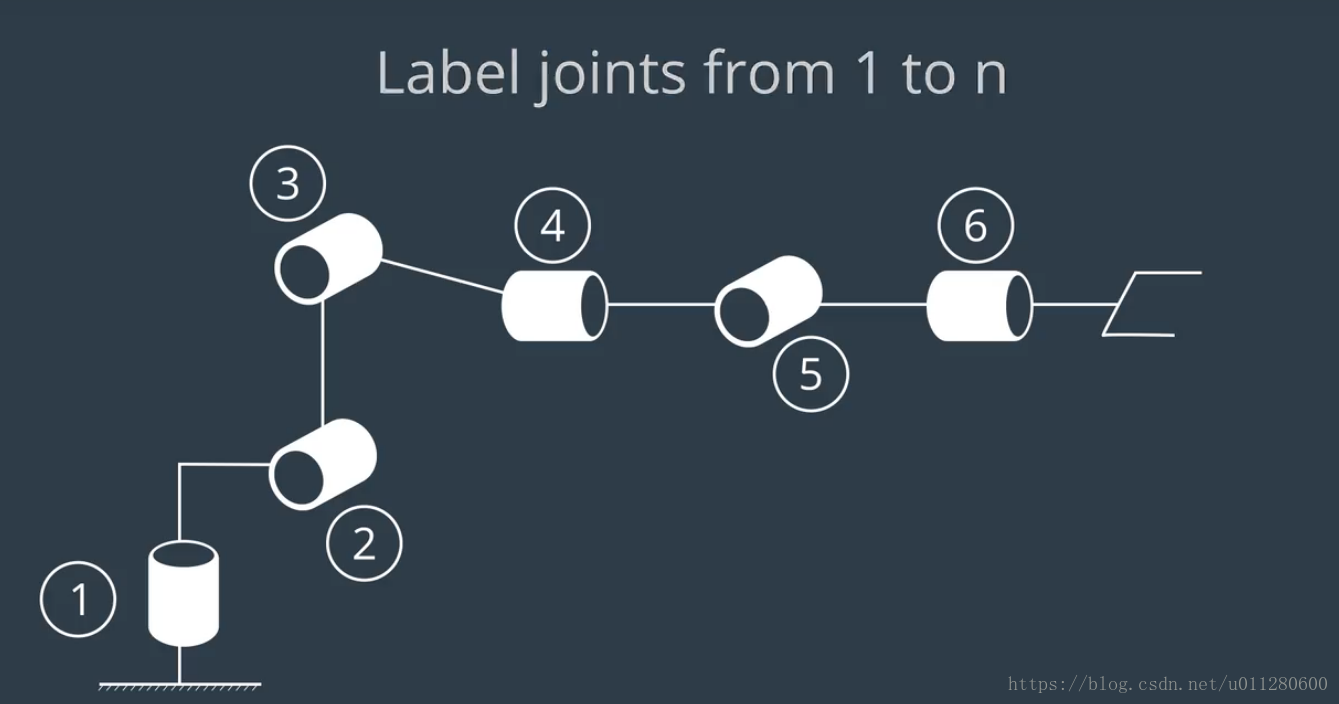
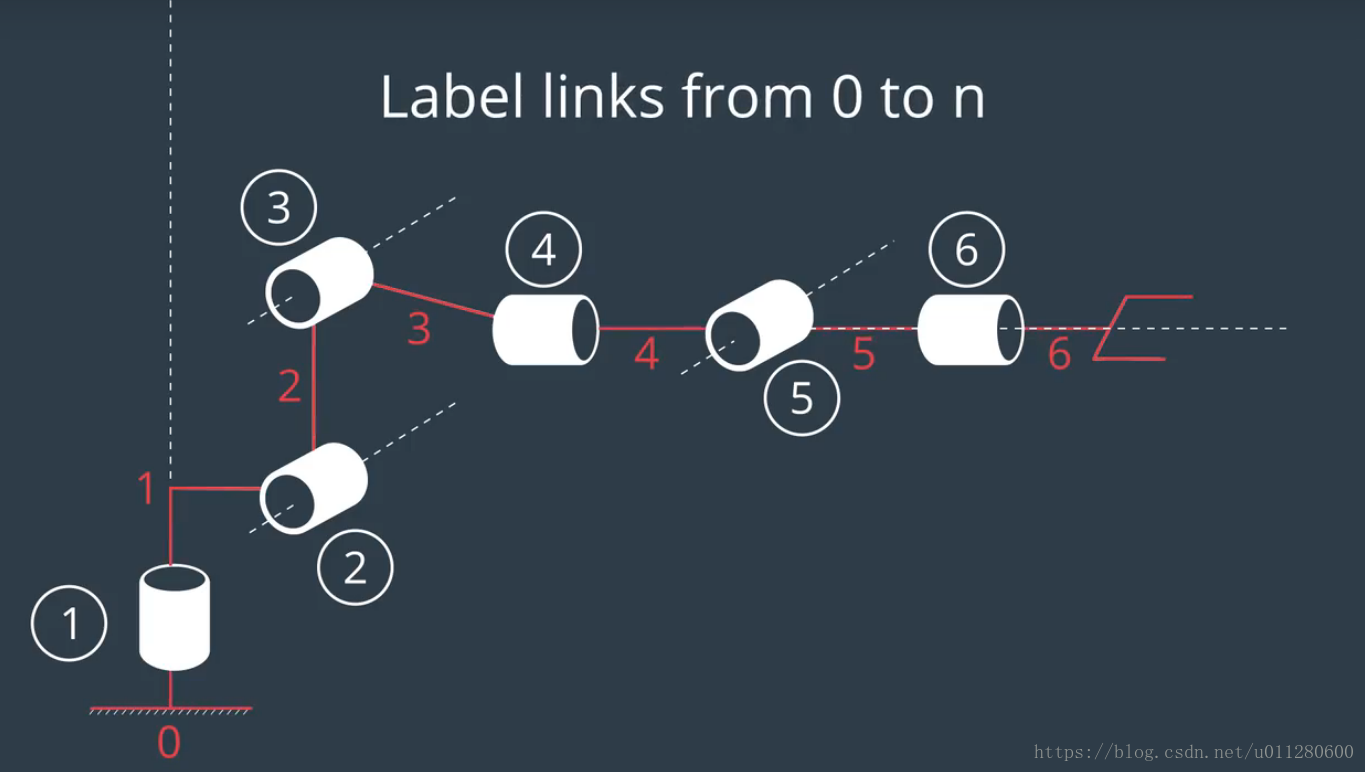
step2,3:
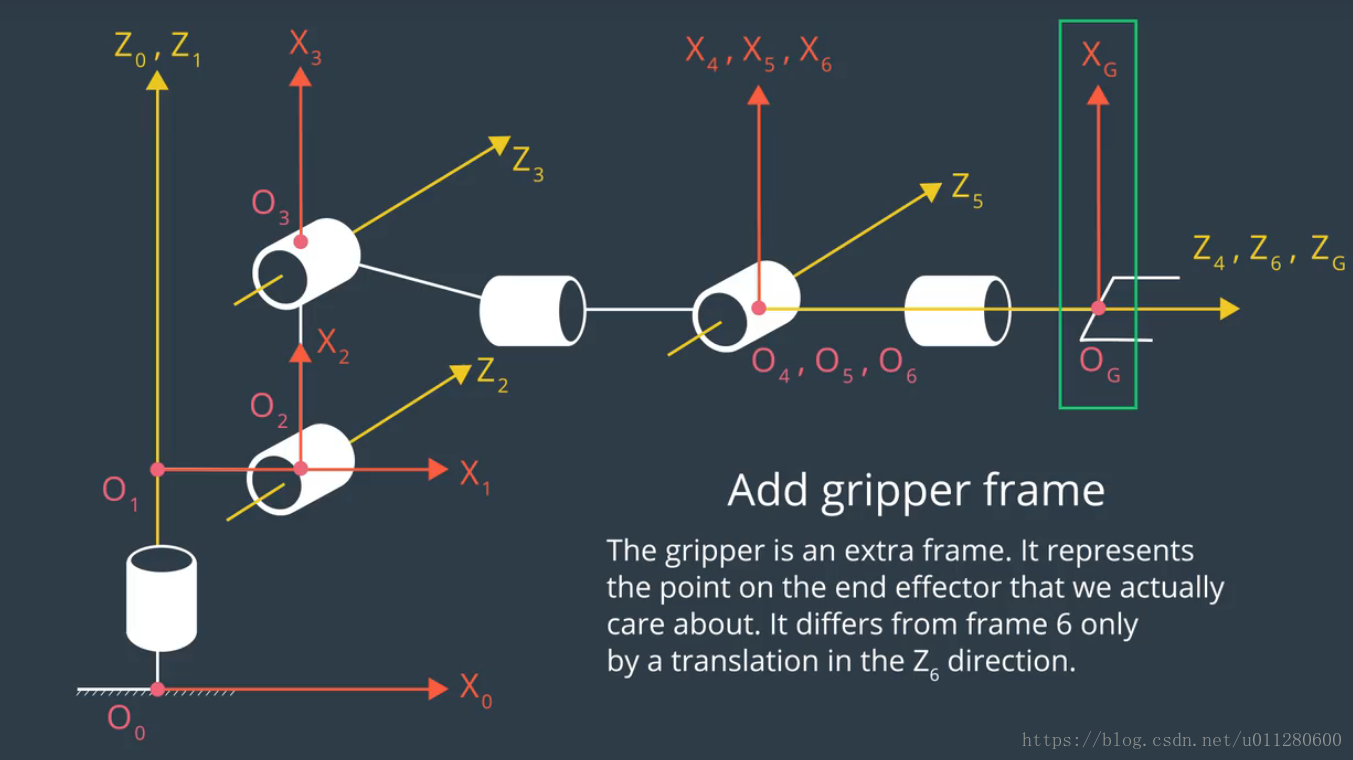
step4,5,6,7,8:
DH参数表填写:
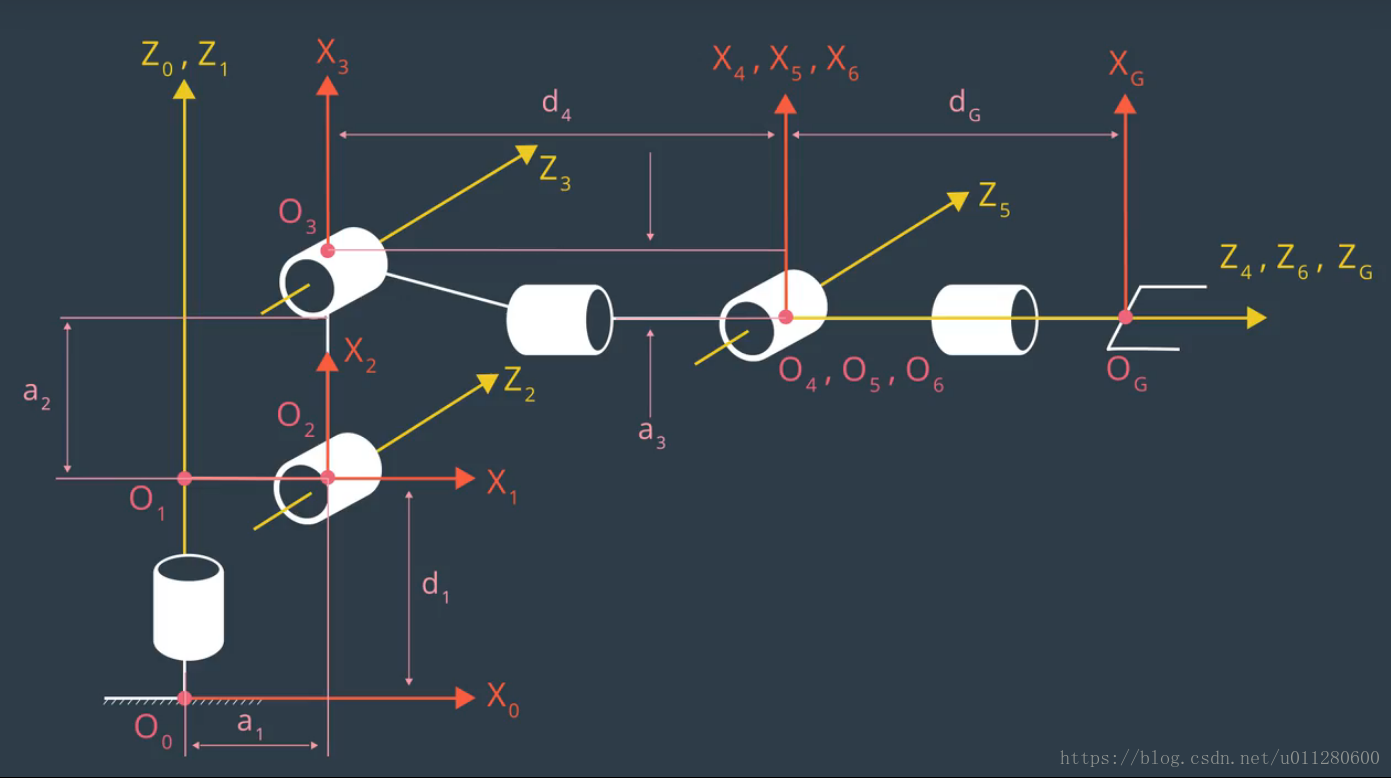
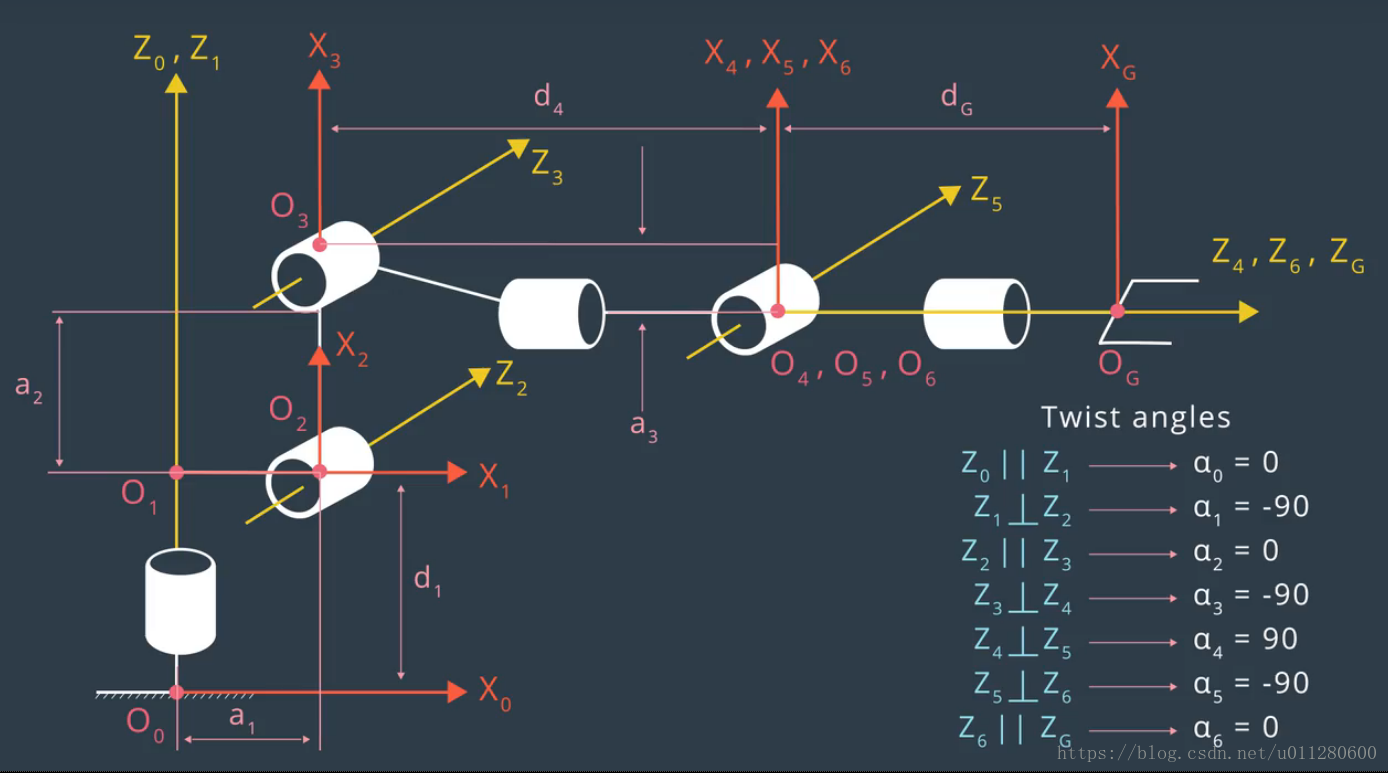
步骤1:alpha 求解,如下:
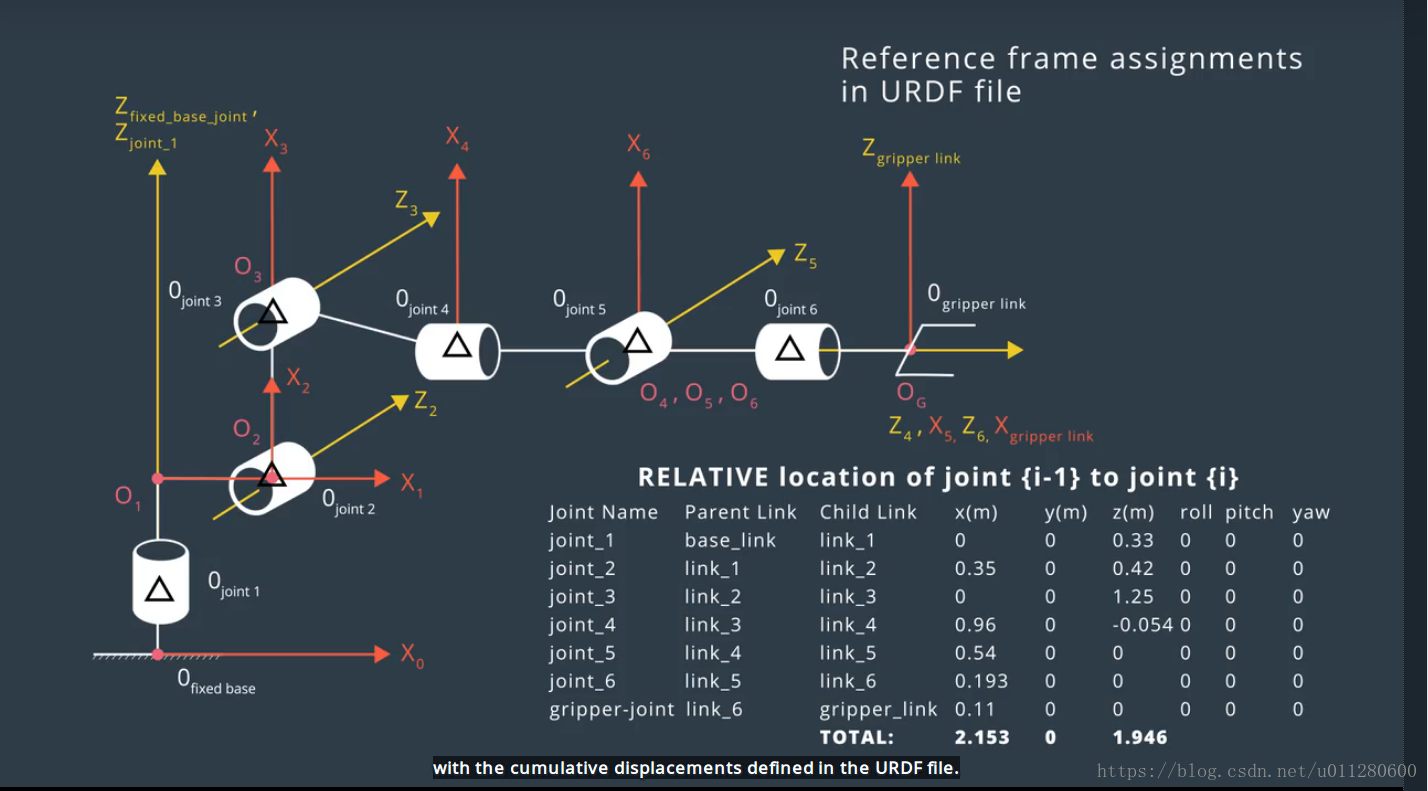
步骤2:a,d 求解,如下:
参考 kr210.urdf.xacro 文件,来源:
git clone https://github.com/udacity/RoboND-Kinematics-Project.git
结合urdf参数求a,d.
urdf空间坐标如下:
步骤3:theta求解
步骤4:
根据以上数据及此处原理,求出T0_G.
步骤5:求出步骤1中到步骤2中坐标系G的转换关系R_corr:先绕Z轴旋转180度,接着绕Y轴旋转-90度。
步骤6:求出基坐标系到抓手的最终转换关系:
T_total = T0_G * R_corr
Debugging 正向运动学
roslaunch kuka_arm forward_kinematics.launch
查看指定坐标系间关系:
rosrun tf tf_echo [reference frame] [target frame]
例如:
rosrun tf tf_echo base_link link_6

















 1039
1039

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









