



kanass是一款国产开源免费的项目管理工具,工具功能完善,支持一键安装,页面设计简洁明了。本文主要介绍如何进行版本管理。
1、添加版本
进入项目->版本->添加版本->填写版本信息->确定
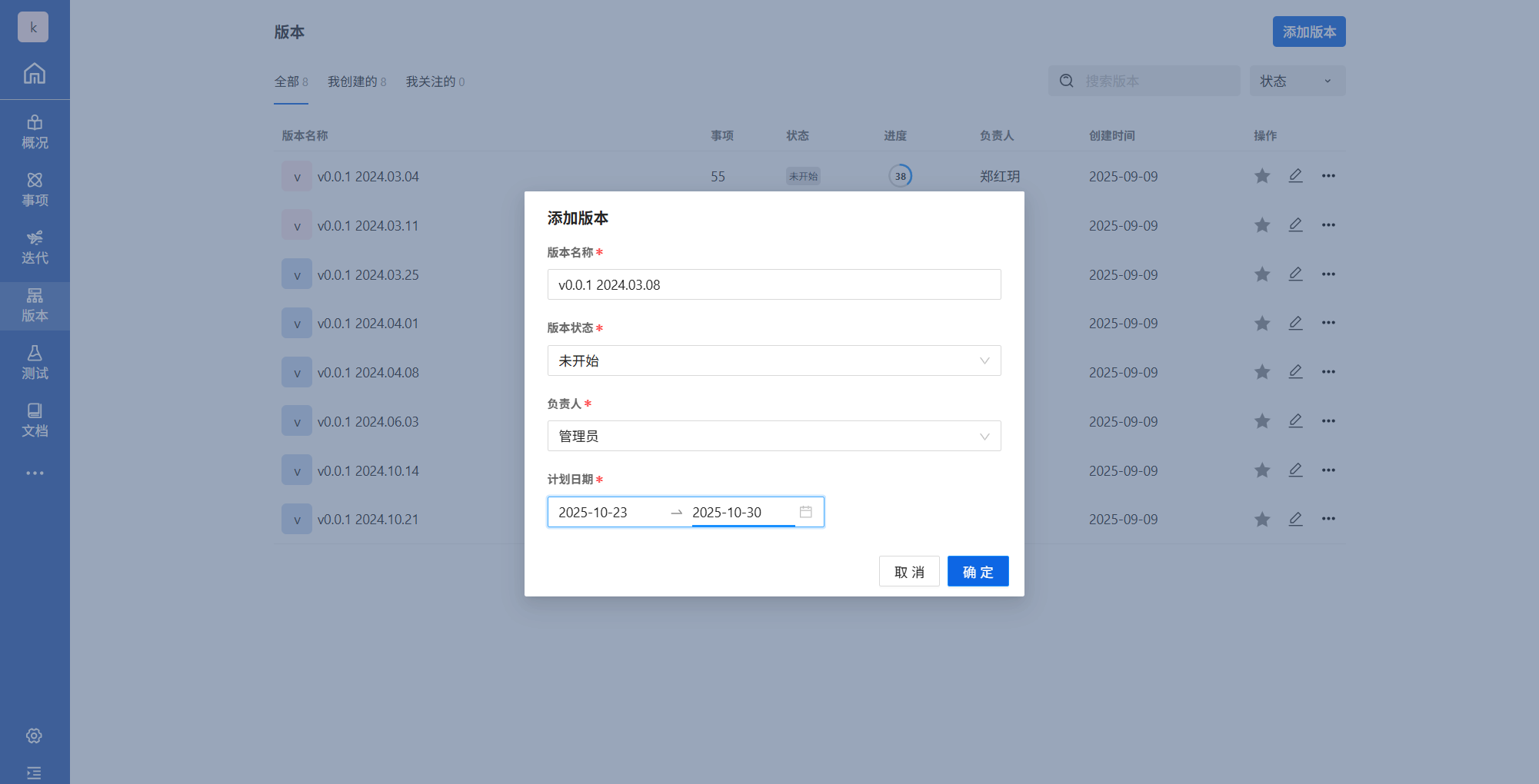 添加版本
添加版本
|
属性 |
是否必填 |
描述 |
|
版本名称 |
必填 |
为版本添加名称 |
|
版本状态 |
必填 |
设置版本状态,默认为未开始 |
|
负责人 |
必填 |
设置版本负责人 |
|
计划日期 |
必填 |
设置版本的计划日期 |
2、版本列表
2.1 查看版本
版本添加成功后,会在列表中显示版本信息
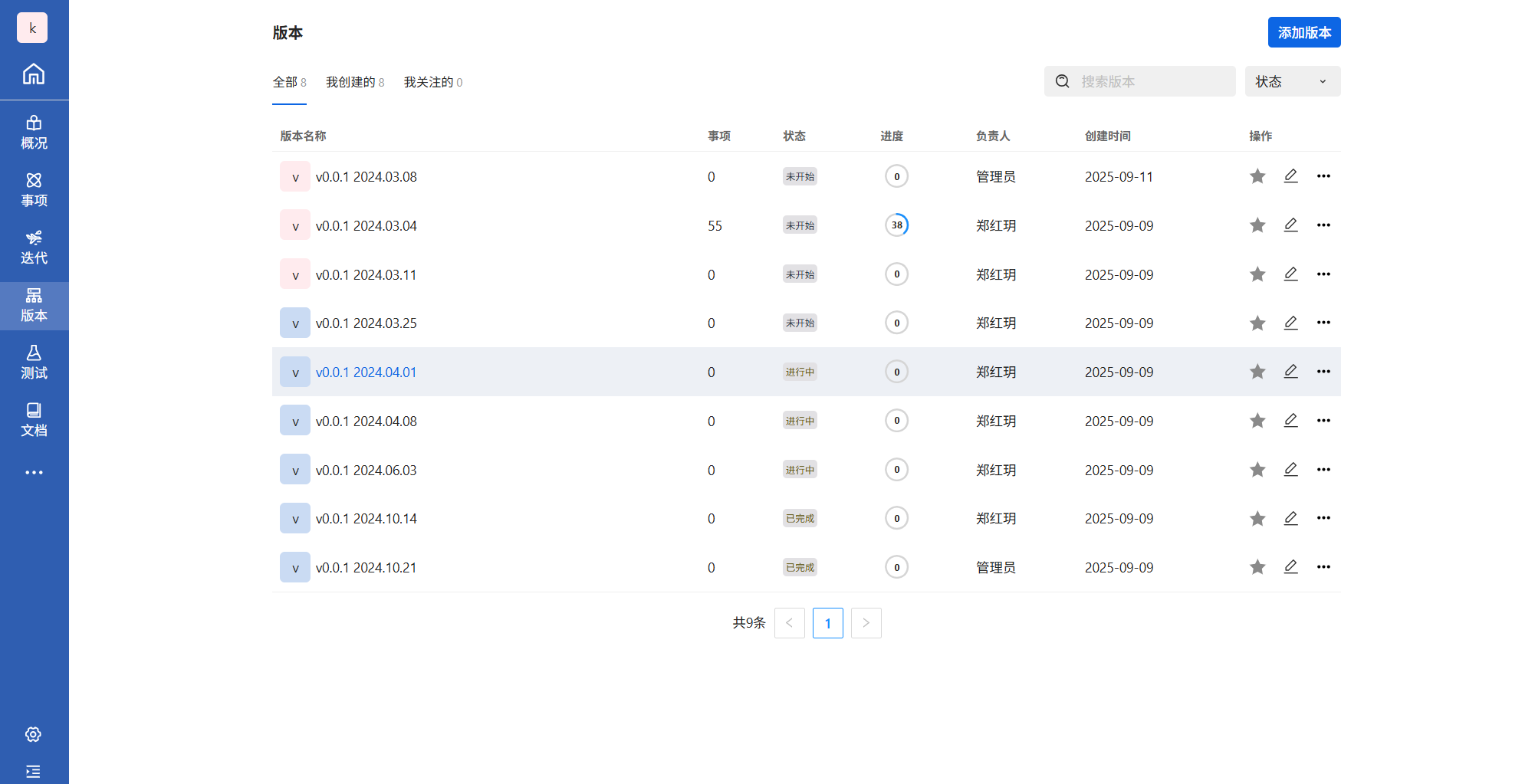 版本列表
版本列表
|
字段 |
描述 |
|
事项 |
显示当前版本下关联的事项个数,新添加的版本还未关联事项,此时显示为0 |
|
状态 |
新添加的版本默认为未开始,可根据状态的变化分别显示进行中、已完成 |
| 进度 | 根据版本中事项的完成情况,计算出版本进度 |
|
收藏 |
点击收藏按钮,可以在“我关注的”tab下查看到被收藏的版本 |
| 全部版本 | “全部版本”tab下显示,当前项目中所有的版本 |
| 我创建的 | “我创建的”的tab下显示,当前登录用户为创建人的版本 |
| 我关注的 | “我关注的”的tab下显示,当前登录用户收藏的版本 |
| 更多按钮 | 更多按钮下有删除按钮,点击删除,可以将版本删除 |
2.2 查询版本
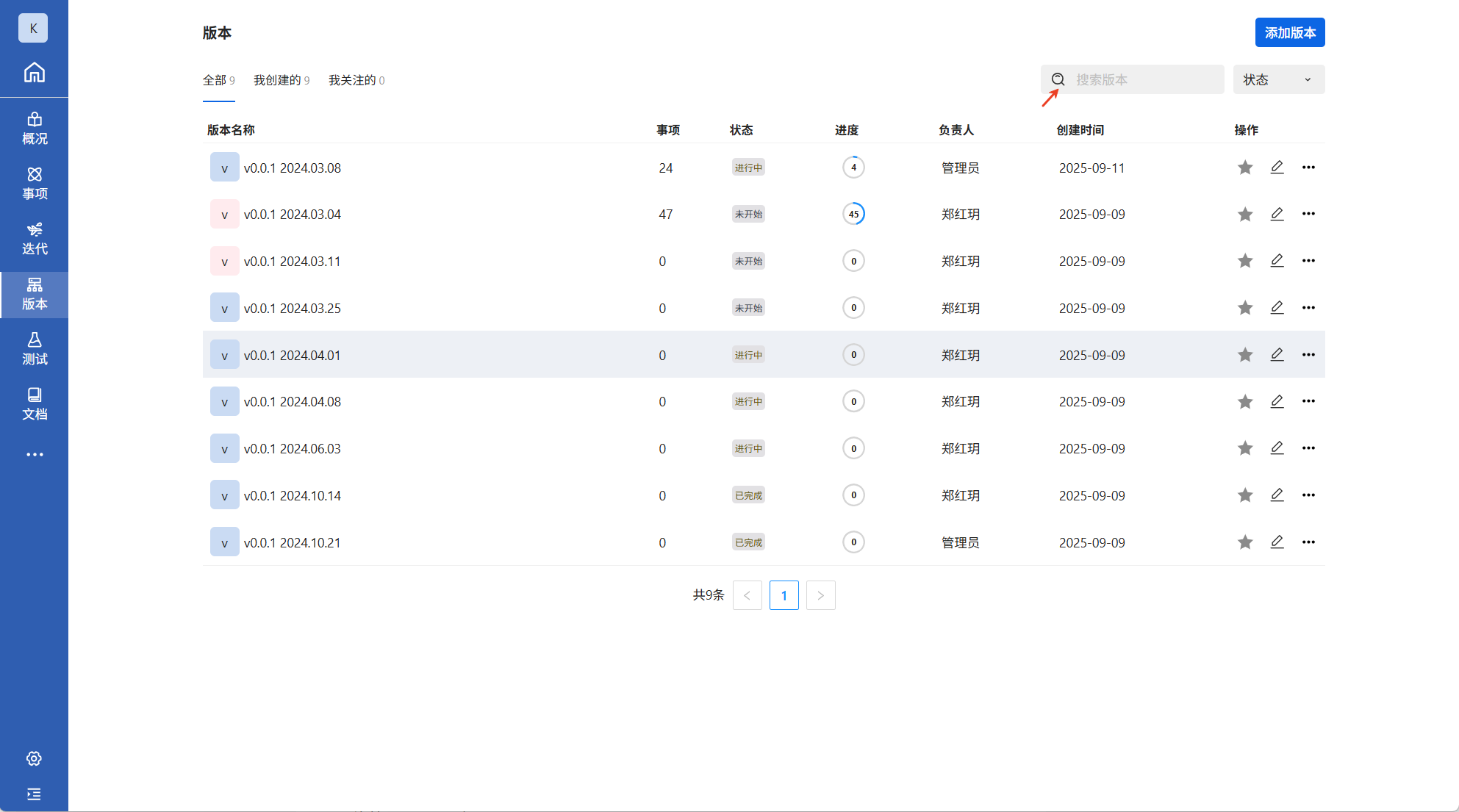
- 使用版本名称查询
在“搜索版本”的搜索框中,输入版本名称,点击回车即可查询;支持模糊查询
- 使用版本状态查询
点击“状态”的下拉框,可以根据版本状态进行查询,如未开始、进行中、已完成,点击确定显示查询结果;点击清空,取消勾选
3、添加事项
点击版本名称,进入到版本事项页面,点击添加事项->选择事项类型,在此版本下添加事项,所属版本字段默认显示为当前版本
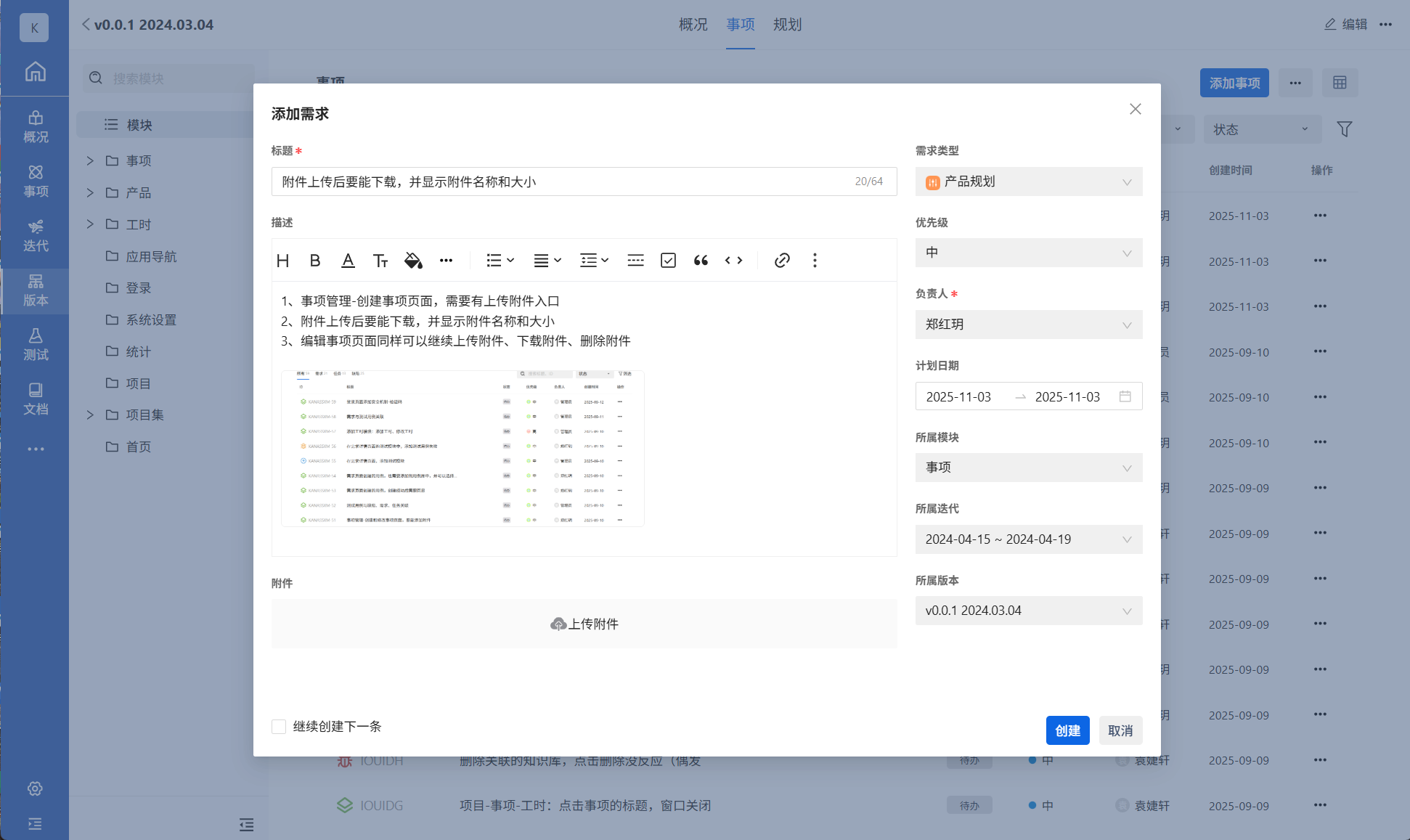 添加事项
添加事项
|
属性 |
是否必填 |
描述 |
|
所属迭代 |
非必填 |
创建位置:在项目->迭代中创建 |
|
所属版本 |
非必填 |
默认显示为当前版本 |
|
所属模快 |
非必填 |
创建位置:在项目->事项->左侧导航栏的模块树中创建 |
|
计划日期 |
非必填 |
设置当前事项的计划完成日期 |
4、规划事项
点击规划,进入规划事项页面
 规划事项
规划事项
- 待办规划事项
显示未关联到当前版本的待办事项
- 版本下事项
显示已经关联到当前版本的事项
- 拖动
页面支持事项拖拽,从“代办规划事项”拖动到“版本下事项”后,会自动关联版本;反之,从“版本下事项”拖动到“代办规划事项”,会取消关联版本
- 搜索
|
属性 |
类型 |
描述 |
|
搜索事项 |
输入框 |
使用事项名称进行搜索,支持模糊查询 |
|
类型 |
下拉框 |
事项类型搜索,如:需求、任务、缺陷或者自定义。确定:显示搜索数据,清空:清空搜索条件,显示全部数据 |
|
负责人 |
下拉框 |
事项的负责人搜索,下拉框展示当前项目下所有人员。确定:显示搜索数据,清空:清空搜索条件,显示全部数据 |
|
状态 |
下拉框 |
事项的状态搜索,如驳回、进行中、待办等。确定:显示搜索数据,清空:清空搜索条件,显示全部数据 |
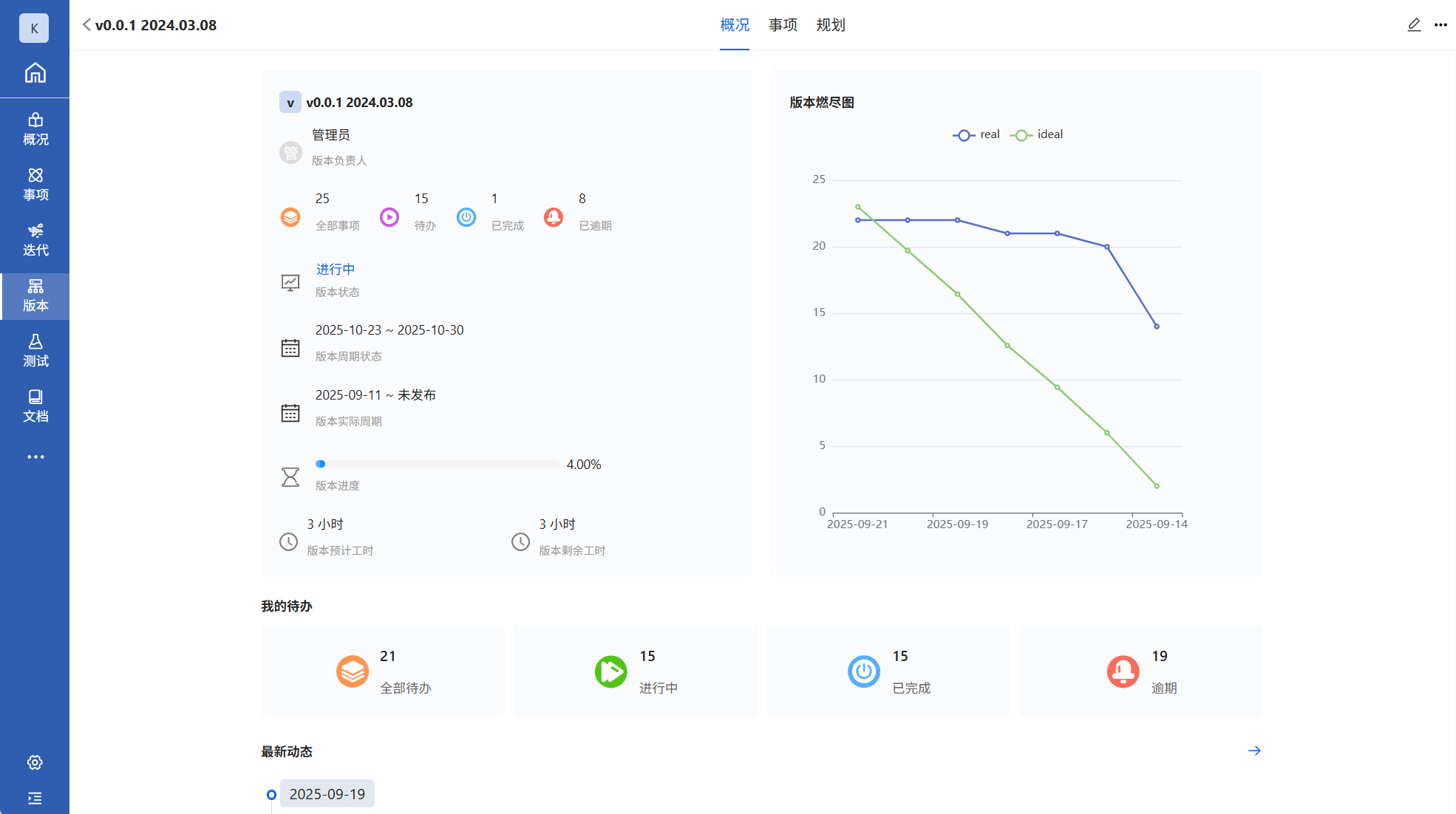
5、版本概况
点击概况,概况页面会详细展示出当前版本的版本信息、事项信息、迭代燃尽图、最新动态
 概况
概况
- 开始版本
若当前版本下未规划事项,“开始版本”按钮为灰色不可点击
若当前版本下已经规划事项,点击“开始版本”,版本的状态变为进行中
- 完成版本
版本的状态变为进行中后,按钮由“开始版本”变为“完成版本”。若当前版本下有未完成事项,系统会有提示,并支持将未完成事项转移到其他版本下。
 完成版本
完成版本
|
属性 | 是否必填 |
描述 |
| 此版本包含 | 非必填 | 显示当前版本下已完成和未完成的事项个数 |
| 将未完成事项移动至 | 非必填 | 可以将未完成的事项移动至其他版本下 |
|
确定 | -- | 点击后,版本变为已完成 |
| 取消 | -- | 点击后,版本仍然为进行中 |
- 版本信息
主要包含:版本名称、负责人、版本中不同状态的事项个数、版本状态、版本计划时间和进度等
- 我的代办
显示当前登录用户的代办事项、进行中事项、已完成事项、逾期事项。点击不同tab页面会自动跳转到事项页面,并显示筛选结果
- 版本燃尽图
显示当前版本的计划和实际完成曲线,直观的显示当前版本的进展
- 最近动态
显示当前版本中,事项的添加和状态改变的信息;点击向右箭头可以查看所有的动态
6、编辑版本
点击版本列表中或者版本详情页面的编辑按钮,编辑版本
 版本编辑
版本编辑
|
属性 |
描述 |
|
保存 |
修改信息后,点击保存,修改成功 |
|
取消 |
修改信息后,点击取消,会取消修改 |
7、删除版本
点击版本列表中或者版本详情页面的更多->删除按钮,删除版本
删除版本会将版本与事项的关联关系一起删除
 删除版本
删除版本

















 1728
1728

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









