 PyInstaller与多帧ICO图标
PyInstaller与多帧ICO图标





 本文介绍如何使用PyInstaller打包应用并确保桌面图标清晰无锯齿,通过使用多帧ICO图标实现图标自适应缩放。文章详细讲解了制作多帧ICO图标的过程,包括使用ToYcon软件将PNG图标转换为多帧ICO格式。
本文介绍如何使用PyInstaller打包应用并确保桌面图标清晰无锯齿,通过使用多帧ICO图标实现图标自适应缩放。文章详细讲解了制作多帧ICO图标的过程,包括使用ToYcon软件将PNG图标转换为多帧ICO格式。
pyinstaller使用多帧ICO图标
pyinstaller使用教程:https://pyinstaller.readthedocs.io/en/stable/
pyinstaller -i test.ico test.py
如果ico图标不是多帧ico的话,桌面图标会出现锯齿,并且放大缩小桌面图标的话,软件图标不会自动适应,下面开始制作多帧ico图标
ToYcon下载
- 英文版:https://toycon.en.softonic.com/
- 中文版:https://download.youkuaiyun.com/download/this_is_id/11687820
ico图标制作
-
网上下载png格式的图标
-
打开ToYcon,右键进行配置

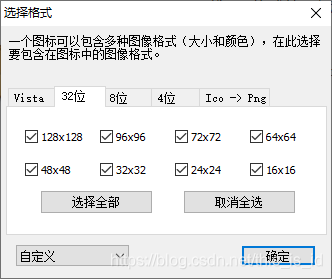
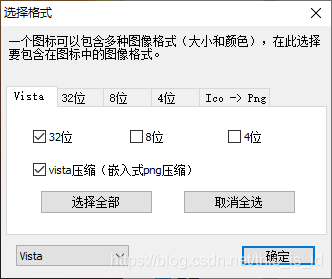
-
将png图标拖入ToYcon
-
得到的ico文件即为多帧ico图标
成果预览


















 2666
2666

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











