




论文: 论文链接.
源码: 源码链接.
由于本来是准备研究PV-RCNN网络的,可是发现源码还没有开源。但是在PCDet.上发现包含了SECOND等几个网络
源码2: 源码链接2.
1 摘要
基于LiDAR或基于RGB-D的目标检测被用于从自动驾驶到机器人视觉的众多应用中。 在处理点云LiDAR数据时,基于Voxel的3D卷积网络已经使用了一段时间,体素方法能够在处理雷达点云数据时的保留更多的信息。 但是,仍然存在问题,包括推理速度慢和方向估计性能低。因此,我们研究了一种改进的稀疏卷积方法用于这种网络,这显着地增加了网络训练和推理的速度。通过引入角度损失的方法来提高方向估计性能,以及一种新的能增强收敛速度和性能的数据增强方法。所提出的网络在KITTI 3D物体检测基准测试中产生最先进的结果,同时保持快速的推理速度。
2 网络结构
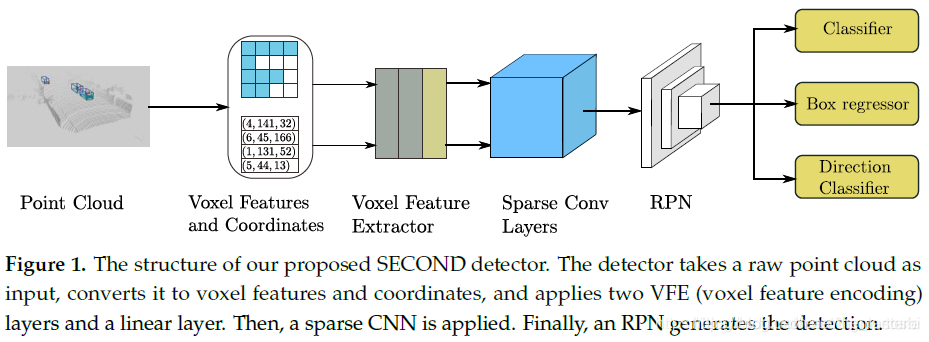
作者将网络分为了三大部分:
1 第一部分a voxelwise feature extractor用于生成体素和体素特征提取
包括图中的前两部分
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6379
6379




 到【灌水乐园】发言
到【灌水乐园】发言







