







 本文介绍了如何使用read命令从用户那里接收参数,以实现自定义输入内容和颜色的功能。通过一个名为plus_color.sh的脚本,用户可以定制显示的信息及其颜色效果。
本文介绍了如何使用read命令从用户那里接收参数,以实现自定义输入内容和颜色的功能。通过一个名为plus_color.sh的脚本,用户可以定制显示的信息及其颜色效果。
通过read传参实现自定义输入内容和颜色plus_color.sh
#!/bin/bash
RED_COLOR='\E[1;31m'
GREEN_COLOR='\E[1;32m'
YELLOW_COLOR='\E[1;33m'
BLUE_COLOR='\E[1;34m'
PINK='\E[1;35m'
RES='\E[0m'
if [ $# -ne 2 ]
then
echo "USAGE $0 content {red|yellow|blue|green}"
exit
fi
case "$2" in
red|RED)
echo -e "$RED_COLOR $1 $RES"
;;
green|GREEN)
echo -e "$GREEN_COLOR $1 $RES "
;;
yellow|YELLOW)
echo -e "$YELLOW_COLOR $1 $RES"
;;
*)
echo "USAGE $0 content {red|yellow|blue|green}"
exit
;;
esac
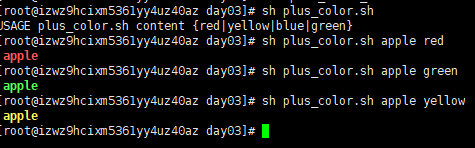
测试
sh plus_color.sh apple red

















 3016
3016

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









