




SignalModelEstimator在WebRTC噪声抑制系统中承担噪声特征建模的核心职责。该类通过实时分析音频信号的频谱特性,提取频谱平坦度、频谱差异和似然比(LRT)三大关键特征,构建动态噪声模型。采用自适应学习机制,周期性更新先验模型参数,能够准确区分语音与噪声。其设计融合统计学原理与信号处理技术,通过直方图收集特征分布,每500帧更新一次模型,平衡了计算效率与准确性。该模块为后续噪声抑制提供决策依据,显著提升语音质量,是WebRTC音频处理管道中实现智能降噪的关键组件。
1. 核心功能
SignalModelEstimator 是 WebRTC 噪声抑制模块中的关键组件,主要负责:
-
信号特征提取:计算频谱平坦度、频谱差异、LRT(似然比检验)等特征
-
噪声模型估计:通过统计分析建立噪声的先验模型
-
自适应更新:根据输入信号动态调整模型参数
-
特征归一化:确保特征值在合理范围内
2. 核心算法原理
2.1 频谱差异计算 (ComputeSpectralDiff)
数学公式:
spectral_diff = var(signal) - cov(signal,noise)² / var(noise)
// 计算信号频谱与噪声模板频谱的差异度量
float ComputeSpectralDiff(
rtc::ArrayView<const float, kFftSizeBy2Plus1> conservative_noise_spectrum, // 保守噪声谱
rtc::ArrayView<const float, kFftSizeBy2Plus1> signal_spectrum, // 信号频谱
float signal_spectral_sum, // 信号频谱和
float diff_normalization) { // 差异归一化因子
// 计算噪声谱平均值
float noise_average = 0.f;
for (size_t i = 0; i < kFftSizeBy2Plus1; ++i) {
noise_average += conservative_noise_spectrum[i];
}
noise_average = noise_average * kOneByFftSizeBy2Plus1;
// 计算信号谱平均值
float signal_average = signal_spectral_sum * kOneByFftSizeBy2Plus1;
// 计算方差和协方差
float covariance = 0.f; // 信号与噪声的协方差
float noise_variance = 0.f; // 噪声方差
float signal_variance = 0.f; // 信号方差
for (size_t i = 0; i < kFftSizeBy2Plus1; ++i) {
float signal_diff = signal_spectrum[i] - signal_average;
float noise_diff = conservative_noise_spectrum[i] - noise_average;
covariance += signal_diff * noise_diff;
noise_variance += noise_diff * noise_diff;
signal_variance += signal_diff * signal_diff;
}
// 计算频谱差异并进行归一化
float spectral_diff = signal_variance - (covariance * covariance) / (noise_variance + 0.0001f);
return spectral_diff / (diff_normalization + 0.0001f);
}
2.2 频谱平坦度计算 (UpdateSpectralFlatness)
数学公式:
spectral_flatness = geometric_mean / arithmetic_mean log(geometric_mean) = (1/N) * Σ log(signal_spectrum[i]) arithmetic_mean = (1/N) * Σ signal_spectrum[i]
void UpdateSpectralFlatness(
rtc::ArrayView<const float, kFftSizeBy2Plus1> signal_spectrum,
float signal_spectral_sum,
float* spectral_flatness) {
// 检查是否有零值(避免log(0))
for (size_t i = 1; i < kFftSizeBy2Plus1; ++i) {
if (signal_spectrum[i] == 0.f) {
*spectral_flatness -= 0.3f * (*spectral_flatness); // 衰减处理
return;
}
}
// 计算几何平均的对数(跳过直流分量i=0)
float avg_spect_flatness_num = 0.f;
for (size_t i = 1; i < kFftSizeBy2Plus1; ++i) {
avg_spect_flatness_num += LogApproximation(signal_spectrum[i]);
}
// 计算算术平均(跳过直流分量)
float avg_spect_flatness_denom = signal_spectral_sum - signal_spectrum[0];
avg_spect_flatness_denom *= kOneByFftSizeBy2Plus1;
avg_spect_flatness_num *= kOneByFftSizeBy2Plus1;
// 计算频谱平坦度:几何平均/算术平均
float spectral_tmp = ExpApproximation(avg_spect_flatness_num) / avg_spect_flatness_denom;
// 时间平均更新:新值 = 旧值 + 0.3*(新测量值 - 旧值)
*spectral_flatness += 0.3f * (spectral_tmp - *spectral_flatness);
}
2.3 LRT更新 (UpdateSpectralLrt)
数学公式:
基于贝叶斯准则的似然比计算,用于语音/噪声分类
void UpdateSpectralLrt(rtc::ArrayView<const float, kFftSizeBy2Plus1> prior_snr,
rtc::ArrayView<const float, kFftSizeBy2Plus1> post_snr,
rtc::ArrayView<float, kFftSizeBy2Plus1> avg_log_lrt,
float* lrt) {
for (size_t i = 0; i < kFftSizeBy2Plus1; ++i) {
// 基于先验SNR和后验SNR计算瞬时LRT
float tmp1 = 1.f + 2.f * prior_snr[i];
float tmp2 = 2.f * prior_snr[i] / (tmp1 + 0.0001f);
float bessel_tmp = (post_snr[i] + 1.f) * tmp2;
// 更新每个频带的平均对数LRT
avg_log_lrt[i] += 0.5f * (bessel_tmp - LogApproximation(tmp1) - avg_log_lrt[i]);
}
// 计算所有频带的平均LRT
float log_lrt_time_avg_k_sum = 0.f;
for (size_t i = 0; i < kFftSizeBy2Plus1; ++i) {
log_lrt_time_avg_k_sum += avg_log_lrt[i];
}
*lrt = log_lrt_time_avg_k_sum * kOneByFftSizeBy2Plus1;
}
3. 关键数据结构
3.1 SignalModel(信号模型)
// 包含提取的所有信号特征
struct SignalModel {
float spectral_flatness; // 频谱平坦度特征
float spectral_diff; // 频谱差异特征
float lrt; // 似然比检验特征
std::array<float, kFftSizeBy2Plus1> avg_log_lrt; // 各频带平均LRT
};
3.2 Histograms(直方图统计)
// 用于收集特征值的统计分布,定期更新先验模型
class Histograms {
public:
void Update(const SignalModel& features); // 更新特征直方图
void Clear(); // 清空直方图数据
};
3.3 PriorSignalModelEstimator(先验模型估计器)
// 基于直方图统计估计先验信号模型参数
class PriorSignalModelEstimator {
public:
void Update(const Histograms& histograms); // 更新先验模型
const PriorSignalModel& get_prior_model() const;
};
4. 核心方法详解
4.1 Update 方法
void SignalModelEstimator::Update(
rtc::ArrayView<const float, kFftSizeBy2Plus1> prior_snr, // 先验SNR
rtc::ArrayView<const float, kFftSizeBy2Plus1> post_snr, // 后验SNR
rtc::ArrayView<const float, kFftSizeBy2Plus1> conservative_noise_spectrum, // 保守噪声谱
rtc::ArrayView<const float, kFftSizeBy2Plus1> signal_spectrum, // 信号频谱
float signal_spectral_sum, // 频谱和(预计算优化)
float signal_energy) { // 信号能量
// 1. 更新频谱平坦度特征
UpdateSpectralFlatness(signal_spectrum, signal_spectral_sum, &features_.spectral_flatness);
// 2. 计算并更新频谱差异特征
float spectral_diff = ComputeSpectralDiff(conservative_noise_spectrum,
signal_spectrum,
signal_spectral_sum,
diff_normalization_);
features_.spectral_diff += 0.3f * (spectral_diff - features_.spectral_diff);
// 3. 累积信号能量用于后续归一化
signal_energy_sum_ += signal_energy;
// 4. 周期性更新直方图和模型参数
if (--histogram_analysis_counter_ > 0) {
histograms_.Update(features_); // 收集统计信息
} else {
// 每500帧更新一次模型参数
prior_model_estimator_.Update(histograms_); // 更新先验模型
histograms_.Clear(); // 清空统计
histogram_analysis_counter_ = kFeatureUpdateWindowSize; // 重置计数器(500)
// 更新归一化参数
signal_energy_sum_ = signal_energy_sum_ / kFeatureUpdateWindowSize;
diff_normalization_ = 0.5f * (signal_energy_sum_ + diff_normalization_);
signal_energy_sum_ = 0.f;
}
// 5. 更新LRT特征
UpdateSpectralLrt(prior_snr, post_snr, features_.avg_log_lrt, &features_.lrt);
}
5. 设计亮点
-
多特征融合:结合频谱平坦度、频谱差异、LRT等多个特征,提高噪声检测准确性
-
自适应学习:通过直方图统计动态学习环境噪声特性
-
计算优化:
-
预计算频谱和避免重复计算
-
使用近似函数(LogApproximation/ExpApproximation)降低计算复杂度
-
周期性更新减少计算负担
-
-
鲁棒性设计:
-
保守噪声估计避免过度抑制
-
防止除零错误(添加小常数0.0001f)
-
异常值处理(零值检测)
-
6. 典型工作流程
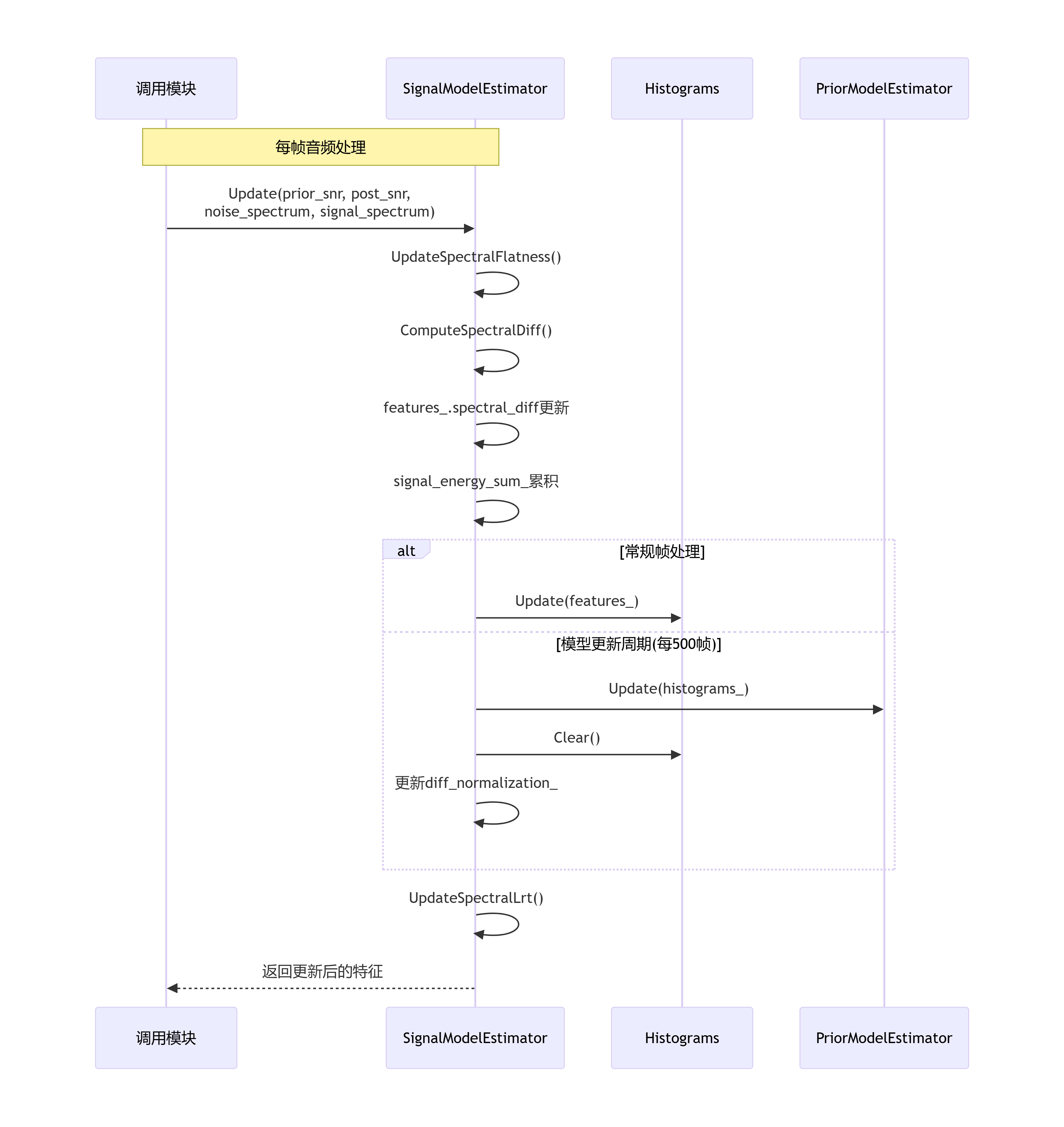
6.1 时序图
6.2 流程图
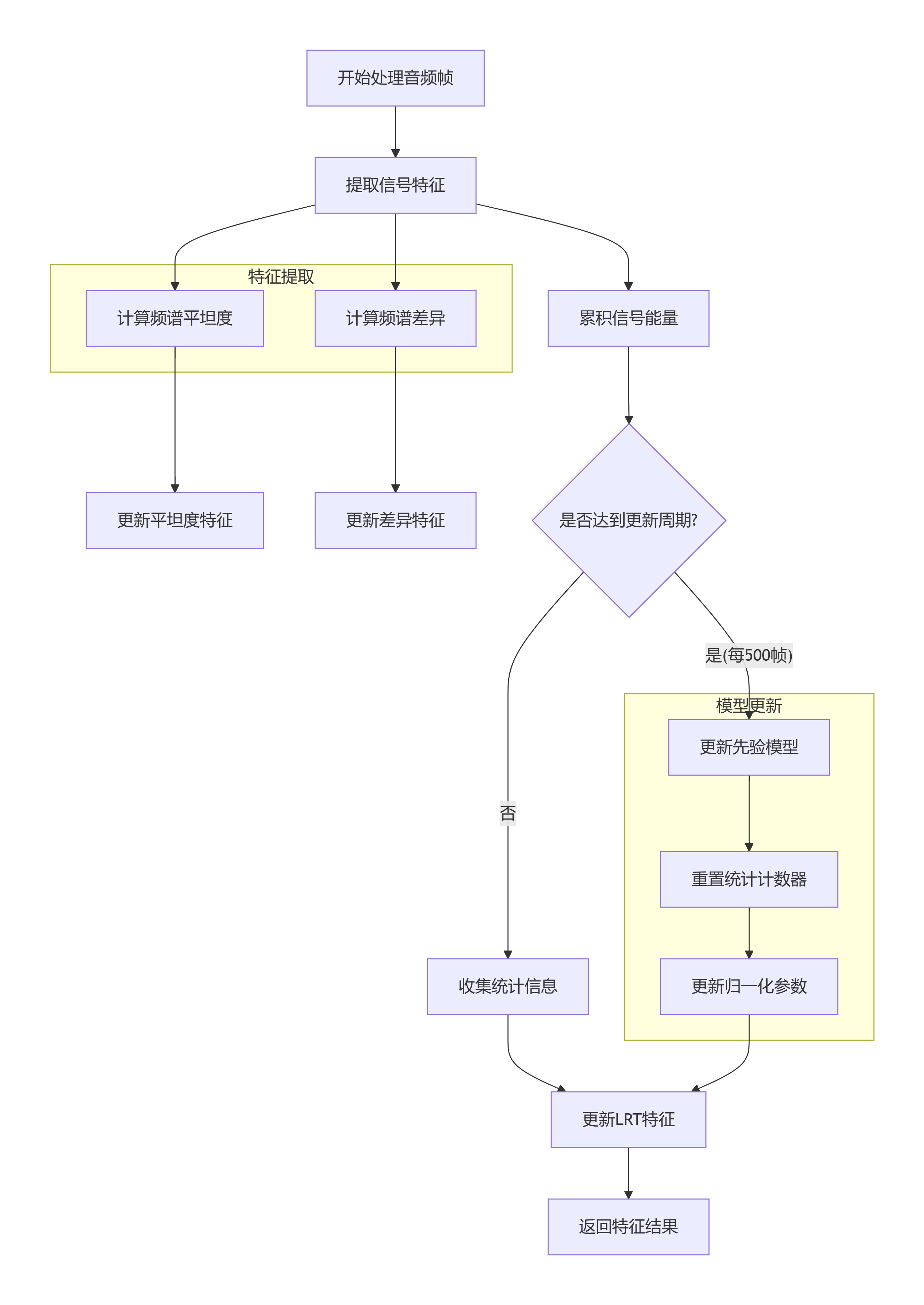
关键流程说明:
-
特征提取阶段:每帧实时计算频谱平坦度、频谱差异等基础特征
-
统计收集阶段:持续收集特征统计信息用于模型学习
-
模型更新阶段:每500帧基于统计信息更新先验模型和归一化参数
-
自适应调整:根据信号能量动态调整特征归一化,适应不同输入电平
这种设计平衡了实时性要求与模型准确性,通过周期性批量更新降低了计算复杂度,同时保持了噪声抑制的适应性。

















 1036
1036

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









