




Nexpose 8.23.0 for Linux & Windows - 漏洞扫描
Rapid7 on-prem Vulnerability Management, released Oct 6, 2025
请访问原文链接:https://sysin.org/blog/nexpose/ 查看最新版。原创作品,转载请保留出处。
作者主页:sysin.org

Nexpose Vulnerability Scanner
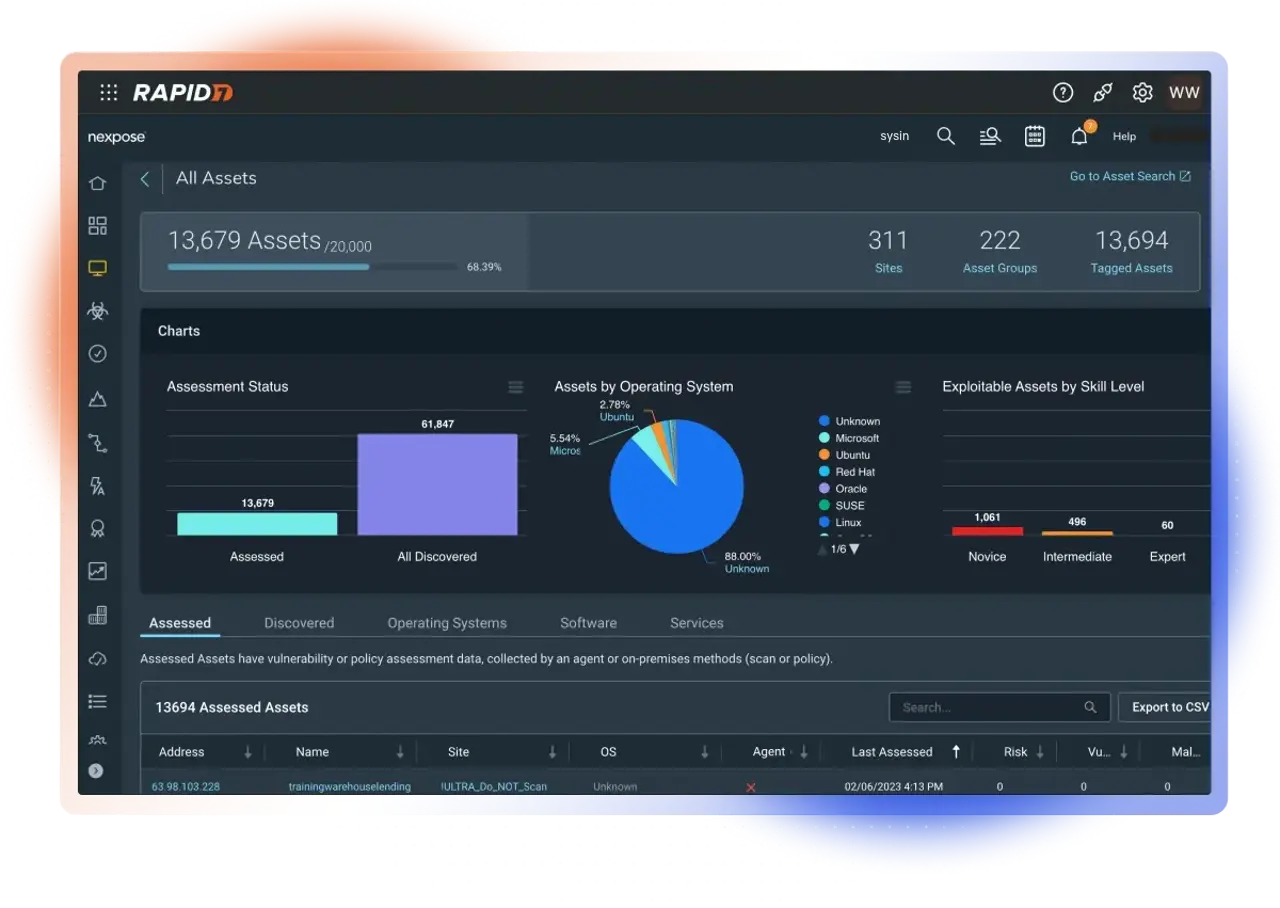
本地部署的漏洞扫描器
一款强大的漏洞管理解决方案,可在整个环境中提供全面的资产可见性,同时协助风险的优先级排序与修复。
工作原理

收集
通过对整个网络的实时覆盖,随时掌握风险情况。

优先级排序
借助更具意义的风险评分,了解应优先关注哪些漏洞。

修复
为 IT 提供快速高效修复问题所需的信息。

评语:对于大型企业来说 —— 无论多大规模 —— 这款产品都非常值得考虑。它功能强大,具有可靠的历史表现与优秀的支持选项。
—— SC Magazine
新增功能
Nexpose 发布说明
Nexpose 版本 8.23.0
📅 软件发布日期:2025 年 10 月 6 日 | 📰 发行说明发布时间:2025 年 10 月 3 日
🚀 改进内容
- 自定义 CSV 报告现在新增了“资产的完全限定域名(FQDN)”数据字段,在导出的资产数据中提供了更高的清晰度和可追溯性。
- 在扫描引擎(Scan Engine)部分新增了一列,可显示并按扫描引擎 ID 进行排序,便于引擎识别与管理。
- Web 应用程序指纹识别经过优化,当连续 5 次识别失败后将自动暂停,以减少问题资产的扫描时间。此行为可通过自定义属性进行配置。
- 更新了 API 端点,以进一步加强严格的身份验证协议 (抄si袭quan者jia),提升整体安全防护能力。
🐞 修复内容
- 修复了一个影响风险分数(Risk Score)报告的问题,尤其是在根据关键性调整分数时。风险分数现在在用户界面(UI)和报告中均能正确显示。
Nexpose 版本 8.22.0
📅 软件发布日期: 2025 年 9 月 24 日 | 📰 发行说明发布日期: 2025 年 9 月 22 日
🚀 改进
- 新增后台维护任务,用于移除安全控制台中未使用的(孤立的)资产数据,帮助减少数据库大小并随时间提升性能。
- 增强了对 WMI(Windows Management Instrumentation,Windows 管理规范)服务检查的处理。在扫描过程中,应用程序现在会验证 WMI 是否配置正确并正常运行 (抄si袭quan者jia),从而在 WMI 之前失败的情况下缩短扫描时长。
- 优化了扫描引擎与被扫描资产之间默认的 HTTP 连接超时时间。这样在服务不可达时,扫描器能更快失败,提高扫描可靠性和用户体验。
- 开始优化 V3 API 中的 GET /vulnerabilities 端点 (sysin),在高并发查询时提升性能和响应速度。
- 改进了 SMTP 扫描告警的日志记录,现在在扫描停止或失败时能提供更清晰的信息,帮助管理员更快响应问题。
🐞 修复
- 修复了“开始新扫描”对话框中,特殊字符未能正确渲染的问题。
- 修复了影响 SUSE Linux Enterprise Server 15 版本检测准确性的问题。系统现在能够通过合适的操作系统元数据可靠识别正确版本。
Nexpose 版本 8.21.0
软件发布日期:2025 年 9 月 17 日 | 发行说明发布时间:2025 年 9 月 16 日
改进内容:
- 支持 SUSE Linux Enterprise Server 15。Rapid7 安全控制台现在可以部署在 SUSE Linux Enterprise Server 15 上,从而扩展了支持的操作系统范围和部署灵活性。
- Console v3 API 文档已更新为符合 OpenAPI v3.1.0 规范。API 文档现在可通过以下路径访问:
/api/3/html、/api/3/json,以及新增的/api/3/yaml。你也可以通过控制台中的 “帮助 > API 文档” 访问这些内容。 - 在使用通配符或精确短语查询时 (sysin),改进了全局搜索中资产搜索结果的准确性,特别是在 IPv4 地址和主机名方面。
修复内容:
- 修复了一个问题:非管理员用户在尝试通过 API 创建发现连接资源时收到错误的响应代码。
- 修复了多个用户界面问题,以提高界面清晰度和可访问性。这些修复包括:通知中心中通知数量显示不准确的问题,Insight Platform 登录横幅的正确显示与可访问性 (抄si袭quan者jia),以及站点名称中特殊字符的正确渲染。
- 修复了一个问题:在用户删除未成功完成的情况下,系统未能正确显示错误信息。
- 修复了一个缺陷:当自定义标签过长时,会导致“站点详情”页面的下拉菜单样式出现问题。
下载地址
此产品每月更新,仅列出最新版,不定期清理。
Rapid7 Vulnerability Management - Nexpose v8.23.0 for Linux x64, Oct 6, 2025
Rapid7 Vulnerability Management - Nexpose v8.23.0 for Windows x64, Oct 6, 2025
相关产品:
更多:HTTP 协议与安全

















 823
823

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









