





摘要:本文深入讲解图像处理中的核心概念——边缘检测,从传统卷积滤波器出发,逐步过渡到基于神经网络的自动学习方法,帮助理解计算机视觉的基础原理。
一、什么是边缘检测?
边缘检测(Edge Detection)是图像处理中的一项关键技术,用于:
✅ 识别图像中物体的轮廓或边界,即像素值发生剧烈变化的地方。
🌐 类比理解:
- 就像我们用铅笔勾勒出照片中人物的轮廓;
- 在 AI 中,模型通过计算像素梯度来找出“明暗交界”的位置。
二、边缘的本质:亮度突变
在灰度图像中,边缘 = 亮度快速变化的区域。
例如下图中,黑色与白色交界处就是边缘:
[ 黑色 ] [ 白色 ]
🔍 检测方法:使用卷积运算,通过特定滤波器(Kernel)扫描图像,寻找强度跳跃。
三、经典边缘检测滤波器
✅ 1. 垂直边缘检测器(Vertical Edge Detector)
[ 1 0 -1 ]
[ 1 0 -1 ]
[ 1 0 -1 ]
🧪 示例:
将该滤波器应用于以下图像(左侧亮,右侧暗):

✅ 卷积结果:
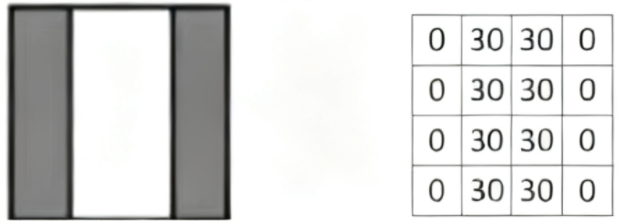
📌 结果说明:中间竖条为高亮,表示检测到了从亮到暗的垂直边缘(正边缘)。
✅ 2. 负边缘检测器(Negative Vertical Edge)
[-1 0 1]
[-1 0 1]
[-1 0 1]

💡 作用:检测从暗到亮的边缘(负边缘),结果为负值。
✅ 3. 水平边缘检测器(Horizontal Edge)
[ 1 1 1]
[ 0 0 0]
[-1 -1 -1]
💡 作用:检测水平方向上的亮度变化。
四、正边缘 vs 负边缘
| 类型 | 定义 | 示例 |
|---|---|---|
| 正边缘 | 从亮 → 暗 的过渡 | 图像左侧明亮,右侧黑暗 |
| 负边缘 | 从暗 → 亮 的过渡 | 图像左侧黑暗,右侧明亮 |
⚠️ 注意:正负边缘通常成对出现,可用于增强轮廓清晰度。
五、为什么需要多种滤波器?
不同角度的边缘需要不同的滤波器来捕捉:
| 角度 | 滤波器示例 |
|---|---|
| 0°(垂直) | [1 0 -1] 等 |
| 90°(水平) | [1 1 1; 0 0 0; -1 -1 -1] |
| 45° | 自定义组合 |
| 135° | 对称设计 |
💡 实际应用中常使用 Sobel、Prewitt、Laplacian 等标准算子。
六、从人工设计到自动学习
❌ 传统方式:手工设计滤波器
- 所有滤波器由人类专家手动构造;
- 缺点:无法适应复杂场景,泛化能力弱。
✅ 现代方式:神经网络自动学习
我们可以把滤波器看作一组可训练参数 :
[w1 w2 w3]
[w4 w5 w6]
[w7 w8 w9]
然后通过反向传播不断优化这些权重,让网络自己“学会”最有效的边缘检测器!
🎯 目标:找到最优滤波器,不仅能检测垂直/水平边缘,还能识别斜边、曲线等复杂结构。
七、神经网络如何实现边缘检测?
在 CNN 中,第一层卷积核的作用就类似于边缘检测器:
- 每个卷积核负责提取一种特征(如垂直边缘、水平边缘);
- 经过训练后,网络会自动学习出最适合任务的滤波器;
- 不再依赖人为设定。
🔄 这正是深度学习的强大之处:让数据说话,让模型自己发现规律。
八、总结
🔑 边缘检测是计算机视觉的基石 —— 它帮助机器“看见”世界的基本结构。
对于开发者而言,掌握边缘检测意味着:
- 理解图像底层特征;
- 掌握卷积运算的核心思想;
- 为后续目标检测、语义分割打下基础。
✅ 一句话总结
当你看到一张图片时,请记住:那些黑白交界的地方,就是机器眼中的“世界轮廓”——而边缘检测,就是它认识世界的起点。



















 4063
4063

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









