




Midjourney做设计开启一扇门
三组超现实摄影作品描绘孤独探索者踏入未知领域的瞬间:主体从绝对黑暗迈入刺眼白光,形成强烈视觉对比。采用中画幅摄影(Leica M11/Fujifilm GFX100),100mm镜头捕捉16K超高清细节,强调真实色彩与自然光影,拒绝滤镜和饱和处理。画面呈现戏剧性阴影与发光门的冲突,营造史诗级电影感,传递神秘而震撼的异世界氛围。每幅作品均为中心构图,突出探索者面对虚无的孤寂感,体现"进入新世界"的象征意义。
A lone figure stepping out from absolute darkness into a blinding white screen, perfectly centered, symbolizing entering a new world, hyper realistic, true-to-life colors, natural tones, no cinematic filters, no teal or orange, breathtaking clarity, medium format photography, Leica M11 / Fujifilm GFX100, 100mm lens, ultra sharp focus, depth of field, realistic lighting, lifelike textures, photo so real it feels tangible, masterpiece, 16k resolution --ar 16:9 --v 6.1 --q 2 --raw
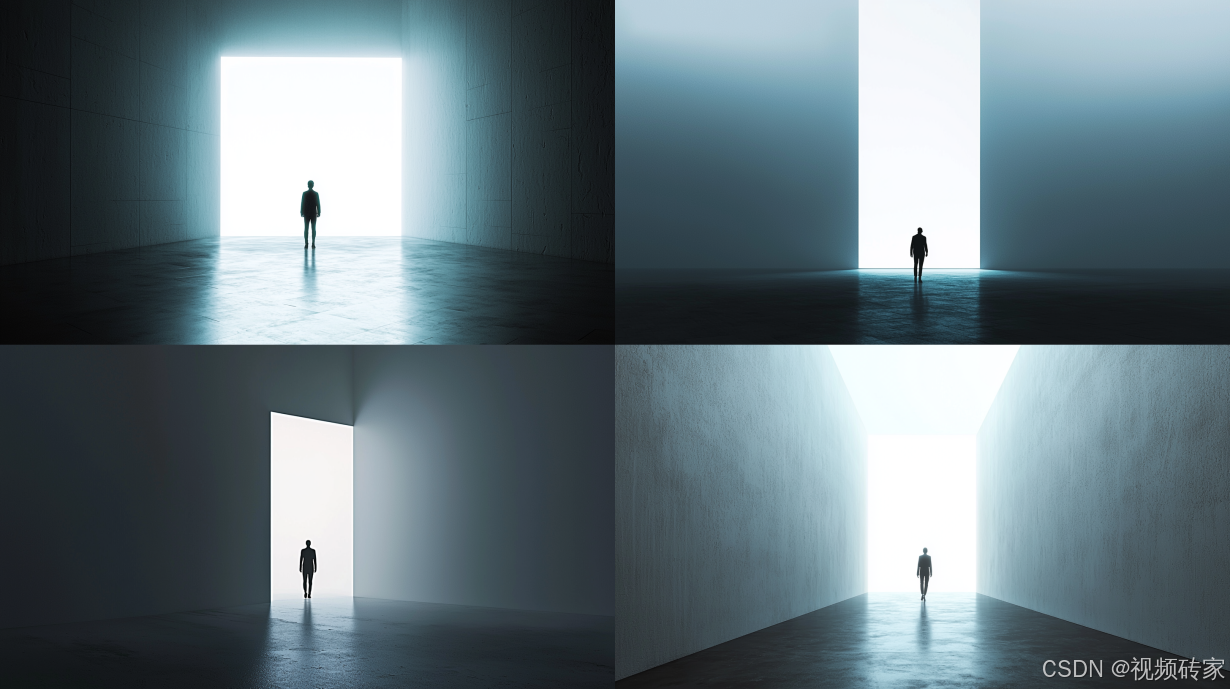
The Explorer, a mysterious lone silhouette stepping into a blinding white portal, surrounded by vast
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 750
750

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









