




 博客指出在熟悉舒适的地方学习收获少,处于恐慌心态则学不进去。若想学习新事物、快速成长,需离开舒适区。但不堪重负会陷入恐慌,应找到到达恐慌境地前的最高点,在此能学得更多、成长更快。
博客指出在熟悉舒适的地方学习收获少,处于恐慌心态则学不进去。若想学习新事物、快速成长,需离开舒适区。但不堪重负会陷入恐慌,应找到到达恐慌境地前的最高点,在此能学得更多、成长更快。
以下是我对世界的看法:
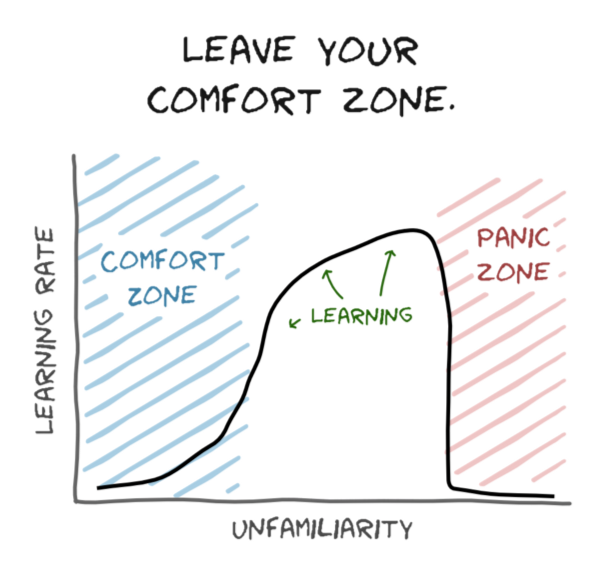
在一个你熟悉的地方,舒适又安全,你可能学进去很少。然而当处于恐慌的心态中,你可能啥都学不会。
每个人都有自己的“狗窝”,在这里,你放浪形骸无拘无束,角落里藏着什么都清清楚楚。不过如果你想学到新事物并且能够迅速成长起来,那么首先你得离开这个“安乐”的地方,自己在学海里迎风破浪“苦作舟”。
当然,如果你感觉不堪重负,那么其实矫枉过正,已经处于恐慌的境地了。可怜的你,风浪太大掉海里了!现在唯一能做的就是尽量保证自己能活着等别人来搭救。
而正如上图所示,在到达恐慌的境地之前的最高点,我们能学得更多,成长得更快,变得更优秀。找到你的学习最高点。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









