



一. 搞懂定义
1.Halcon 弧形
关键参数是起始角度和终点角度 范围可选(0~6.28) 或者是(0~-6.28), 还有就是方向order: positive是逆时针转, negative是顺时针。
2.直线与X轴夹角
定义:绕着起始点 转到 x轴的角度(x轴可由 起始点 及其右边的点构成) , 范围包括 0~3.14 -3.14~0。
二. 直线和X轴夹角代码测试
观察直线与轴夹角 ,可以用以下代码
dev_close_window ()
dev_open_window (0, 0, 512, 512, 'white', WindowID)
RowA1 := 255
ColumnA1 := 10
RowA2 := 255
ColumnA2 := 501
dev_set_color ('red')
disp_line (WindowID, RowA1, ColumnA1, RowA2, ColumnA2)
dev_set_color ('black')
AngleTuple:=[]
RadTuple:=[]
RowB1 := 255
ColumnB1 := 255
for i := 1 to 360 by 5 //角度转为弧度
RowB2 := 255 + sin(rad(i)) * 200
ColumnB2 := 255 + cos(rad(i)) * 200 //x是cos y是sin
disp_line (WindowID, RowB1, ColumnB1, RowB2, ColumnB2)
angle_lx (RowB1, ColumnB1, RowB2, ColumnB2, Angle)
RadTuple:=[RadTuple,rad(i)]
AngleTuple:=[AngleTuple,Angle]
endfor
效果如下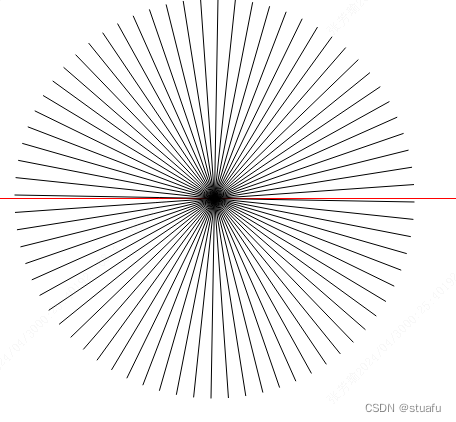
范围就是 0~3.14 -3.14~0 (3.14 也是-3.14)
三.弧线的起始点和终止点
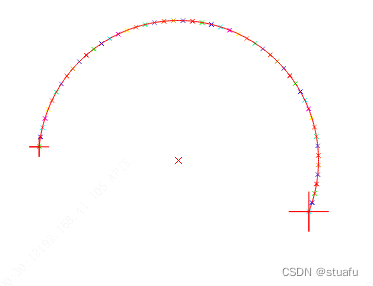
那么如果在halcon 已知一段圆弧(通过拟合轮廓得出,可以获取起始角度 终止角度 方向,但是正角度可能正负都有), 需要遍历起始角度和终点角度 求出圆弧上的每个点坐标(步)。这里不用轮廓提取点的方法。需要注意的是弧线的角度,和通过三角函数求点的角度不是同一概念,先通过以下代码获取得到首尾点,下图较大的红十字。
startAng:=360- (start_angle_rad)/3.14159*180
endAng:= 360-(end_angle_rad)/3.14159*180
RowB2 := 255 + sin(2*3.14159-start_angle_rad) * radius
ColumnB2 := 255 + cos(2*3.14159-start_angle_rad) * radius //x是cos y是sin
gen_cross_contour_xld(Cross, RowB2, ColumnB2, 20, 0)
RowB3 := 255 + sin(2*3.14159-end_angle_rad) * radius
ColumnB3:= 255 + cos(2*3.14159-end_angle_rad) * radius //x是cos y是sin
gen_cross_contour_xld(Cross2, RowB3, ColumnB3, 40, 0)
四.通过角度遍历弧线每一点
继续考虑角度的各种情况,处理思路
1.先将弧度转为0~6.24之间
2.再针对 顺逆方向,起始终止谁大谁小,进行调整角度。
* 定义圆心坐标和半径
row_center := 255
col_center := 255
radius := 100
num_points:=50
start_angle_rad := -4.56851606560302
end_angle_rad :=6.755260182603
order:='negative'
* 初始化轮廓对象用于显示点
gen_empty_obj(ArcPoints)
if( start_angle_rad<0 )
start_angle_rad:=start_angle_rad+6.28
endif
if( end_angle_rad<0 )
end_angle_rad:=end_angle_rad+6.28
endif
**以下代码可封装为GenCrossCircleRad (SinPoints, ArcPoints, ContCircle1, start_angle_rad, end_angle_rad, row_center, col_center, radius, num_points, order, angleTupleSin, angleTuple)
**
gen_circle_contour_xld(ContCircle, row_center, col_center, radius, start_angle_rad,end_angle_rad,order, 1)
gen_cross_contour_xld(Point, row_center, col_center, 10, 0.785) // 注意坐标顺序,先y后x
concat_obj(ArcPoints, Point, ArcPoints)
if(order=='positive')
if(start_angle_rad>end_angle_rad)
end_angle_rad:=end_angle_rad+6.28
endif
endif
if(order=='negative' )
if(start_angle_rad<end_angle_rad)
start_angle_rad:=start_angle_rad+6.28
endif
endif
*如果是角度 那么化简到 -PI~PI 然后逐步添加角度差
*
angle_step_rad := (end_angle_rad - start_angle_rad) / num_points
angleTupleSin:=[]
* 遍历角度
for i := 0 to num_points by 1
angle_rad := start_angle_rad + i * angle_step_rad
*x := col_center + radius * sin(angle_rad) // 使用cos计算X坐标
*y := row_center + radius * cos(angle_rad) // 使用sin计算Y坐标
y := 255 - sin(angle_rad) * radius
x := 255 + cos(angle_rad) * radius //x是cos y是sin
angleTupleSin:=[angleTupleSin,angle_rad]
* 生成点,并添加到轮廓对象
gen_cross_contour_xld(Point, y, x, 6+i*0.0, 0.785) // 注意坐标顺序,先y后x
concat_obj(ArcPoints, Point, ArcPoints)
endfor
return ()
gen_empty_obj(SinPoints)
get_contour_xld(ContCircle, Row, Col)
tuple_length(Row, Length)
angleTuple:=[]
for i := 1 to Length-1 by 1
tuple_select(Row,i, y)
tuple_select(Col, i,x)
gen_cross_contour_xld(Point, y,x, 6+i*0.05, 0.785) // 注意坐标顺序,先y后x
angle_lx( y, x,row_center, col_center, Angle)
angleTuple:=[angleTuple,Angle]
concat_obj(SinPoints, Point, SinPoints)
endfor

















 1481
1481



 到【灌水乐园】发言
到【灌水乐园】发言








