 视觉SLAM入门
视觉SLAM入门





 本文介绍视觉SLAM的基础概念,涵盖视觉里程计、后端优化、回环检测及建图等核心流程,并通过数学模型阐述SLAM问题。同时,提供Linux环境下的编程指导,包括cmake使用、库管理和IDE配置。
本文介绍视觉SLAM的基础概念,涵盖视觉里程计、后端优化、回环检测及建图等核心流程,并通过数学模型阐述SLAM问题。同时,提供Linux环境下的编程指导,包括cmake使用、库管理和IDE配置。
文章目录
第1讲 预备知识
- 了解什么是slam,如何使用本书和配套代码;
- 对高等数学、线性代数、概率论;C++;Linux有基本的了解;
此处就略过,不细说了。
第1部分 数学基础
第2讲 初识SLAM
2.1 引子:小萝卜的例子
阅读一下即可,略
2.2 经典视觉SLAM框架
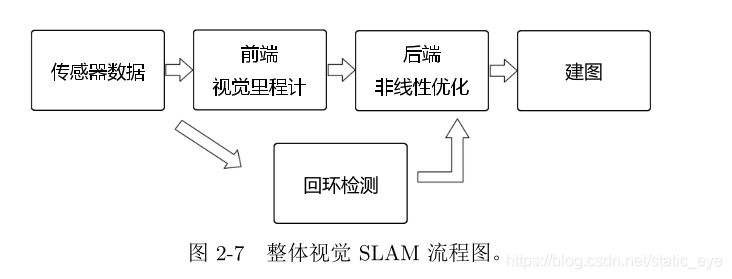
整个视觉SLAM流程包括以下步骤:
- 传感器信息读取。在视觉 SLAM 中主要为相机图像信息的读取和预处理。如果在机 器人中,还可能有码盘、惯性传感器等信息的读取和同步。
- 视觉里程计 (Visual Odometry, VO)。视觉里程计任务是估算相邻图像间相机的运动, 以及局部地图的样子。VO 又称为前端(Front End)。
- 后端优化(Optimization)。后端接受不同时刻视觉里程计测量的相机位姿,以及回 环检测的信息,对它们进行优化,得到全局一致的轨迹和地图。由于接在 VO 之后, 又称为后端(Back End)。
- 回环检测(Loop Closing)。回环检测判断机器人是否曾经到达过先前的位置。如果 检测到回环,它会把信息提供给后端进行处理。
- 建图(Mapping)。它根据估计的轨迹,建立与任务要求对应的地图。
2.3 SLAM问题的数学表述
- 什么是运动?我们要考虑从 k − 1 时刻到 k 时刻,小萝卜的位置 x 是如何变化的。
- 什么是观测?假设小萝卜在 k 时刻,于 xk 处探测到了某一个路标 yj,我们要考虑 这件事情是如何用数学语言来描述的。
先来看运动。
无论是什么传感器,我们都能使用一个通用的、抽象的数学模型:
x k = f ( x k − 1 , u k , w k ) \mathbf{x}_k = f (\mathbf{x}_{k-1}, \mathbf{u}_k, \mathbf{w}_k) xk=f(xk−1
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 716
716

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









