






01 引言
你是否曾为了一本绝版的编程书而四处寻找PDF?是否因为昂贵的正版书籍或课程而犹豫不前?在技术日新月异的今天,如何找到免费、高质量且系统化的学习资料,成了许多开发者(尤其是初学者)面临的第一个挑战。
今天,要向大家介绍一个在GitHub上被奉为“程序员宝藏”的神奇项目——free-programming-books。它不是一个简单的书单,而是一个由全球开发者共同维护的、涵盖几乎所有编程语言和技术的知识宇宙。接下来,就让我们一起揭开它的神秘面纱,看看这个标星超过30万的“开源宝库”如何让你的编程学习之路事半功倍,且不花一分钱。
02 项目介绍
free-programming-books 是一个由全球开发者社区共同维护的巨型资源库,专门收集和分享免费的编程相关教育资源。它的核心使命是无论其经济状况如何,都让编程知识变得对所有人开放和可及。
因为面向全球,所以收藏了各个国家的40多种语言的资源。

资源涉及操作系统、python、Java、AI、运维等多个领域。资源类型远不止是电子书,还包括:
- 免费电子书: 涵盖几乎所有编程语言、框架、理论和领域的经典和现代书籍。
- 在线课程: 链接到像
Coursera、edX、Udacity等平台的免费课程。 - 交互式编程挑战: 如
FreeCodeCamp、LeetCode免费题集等。 - 播客和视频: 编程相关的播客节目和技术大会演讲视频。
- 问题集与竞赛编程: 适合练习算法和数据结构。
- 编程环境设置指南: 帮助新手配置开发环境。
GitHub地址:github.com/EbookFounda…
03 如何使用
官方提供了可视化的搜索,非常方便。官方地址:
ebookfoundation.github.io/free-progra…
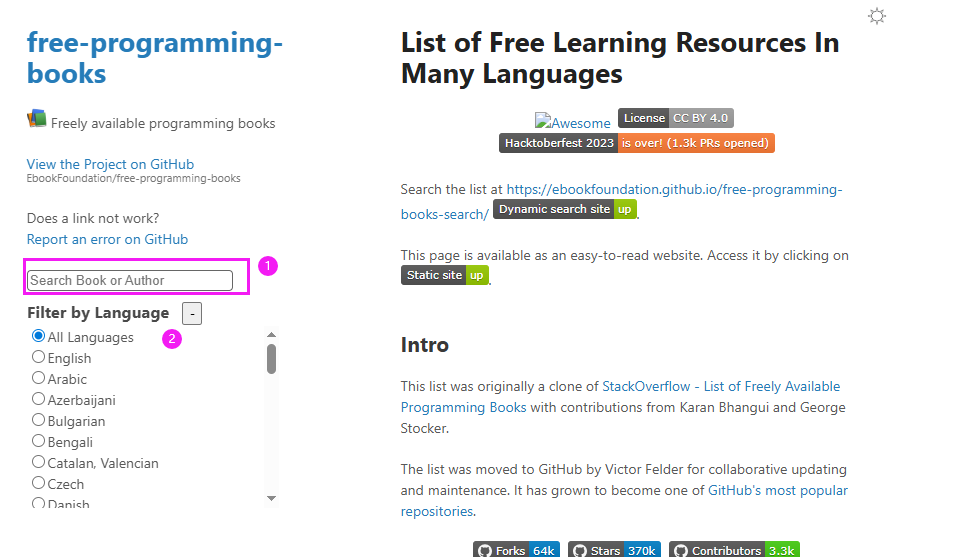
可以在①处搜索需要的资源,通过②过滤需要的语言。
也可以自行查找:
也可以在GitHub上选择中文,然后看看有哪些资源:
04 小结
总而言之,free-programming-books 项目远不止是一个资源列表,它用最直接的方式告诉我们:学习的门槛不应被金钱所阻碍。
- 对于学习者,它是一个取之不尽的能量站,能支撑你从入门到精通的整个旅程。
- 对于社区,它是一个充满活力的协作典范,证明了集体的力量能够创造何等巨大的公共价值。
下次当你需要寻找学习资料时,不必再盲目地在搜索引擎中徘徊,先来这个宝库看看吧。收藏、分享这篇文章,或者直接Star那个GitHub项目,让它成为你技术工具箱里最坚实的基石。毕竟,最好的东西,往往是免费的。


















 1900
1900

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











