






引言:物业管理的“暗礁”与数字化的破局
在传统物业管理中,工单流转的三大顽疾长期困扰着行业:业主报修找不到人、维修进度看不见、责任归属理不清。这些问题不仅降低了服务效率,还加剧了业主与物业之间的矛盾。而随着物业工单系统、报事报修小程序、智能派单管理等技术的成熟,一场以“数字化重构工单流转逻辑”为核心的变革正在重塑行业——从“人盯人”到“数据驱动”,从“信息孤岛”到“全链路透明化。
一、传统工单管理的三大痛点与数字化解法
1. 报修找不到人:智能派单引擎的精准匹配
传统模式依赖电话或纸质登记,易漏单、错派。而物业工单系统通过以下方式实现精准匹配:
-
AI语义识别:业主通过小程序语音或文字报修,系统自动识别故障类型(如水电/安防/保洁)并分类。
-
三级响应机制:紧急工单(如漏水)30秒直达最近工程师,常规工单智能匹配技能标签与地理位置。
-
抢单模式:滴滴抢单模式激发维修人员积极性,避免推诿。
2. 进度看不见:全流程透明化与实时追踪
-
业主端可视化:通过小程序或APP实时查看工单状态、工程师位置、维修节点照片。
-
超时熔断:若维修耗时超同类工单均值20%,自动升级至主管介入。
-
电子围栏签收:蓝牙信标触发签收,误差<0.5米,杜绝“虚假完成”。
-

3. 责任理不清:区块链存证与数据闭环
-
防扯皮证据链:全程记录工程师到场时间戳、维修前后对比图、业主电子签名,生成不可篡改的工单档案。
-
外包服务监理:第三方服务商从接单到验收全流程纳入系统监控,超时自动扣减服务费。
二、物业工单系统的四大核心模块

1. 物业报事报修系统:从“被动响应”到“主动预防”
-
智能预警:通过历史数据预测高频故障设备(如电梯月报修量突增200%),提前触发保养计划。
-
多端协同:业主小程序、工程师app/PDA、物业中台、经理大屏四端数据实时同步,打破信息孤岛。
2. 物业维修派单系统:算法驱动的效率革命
-
路径优化算法:结合电梯等待时长预测与院感防控路线规避,跨楼宇耗时缩短22%。
-
动态负载均衡:实时监控工程师负载状态,负载超80%自动启动备用运力。
3. 物业报修小程序:极简体验背后的技术赋能
-
一键报修:支持文字、语音、图片多模态输入,快速完成工单提交。
-
无感支付:维修费用在线结算,自动关联电子发票。
-
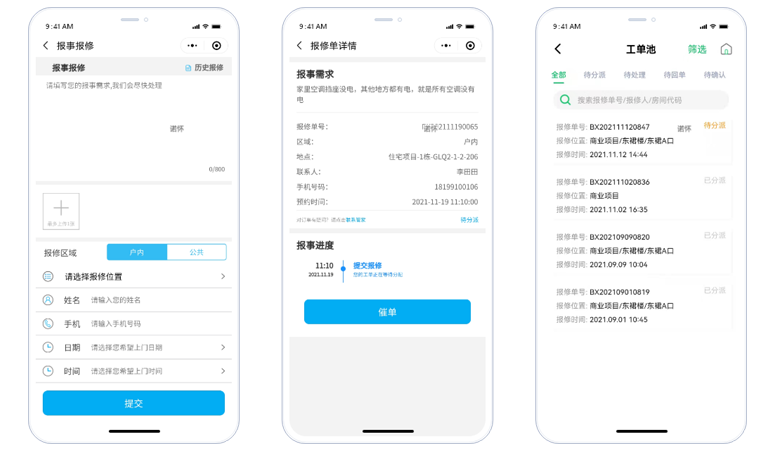
诺怀物业工单系统小程序
4. 工单派单管理系统:数据驱动的决策升级
-
成本沙盘:对比不同维修方案对年度维保费用的影响(如防水工程外包vs自营)。
-
服务质量KPI:响应速度、返修率、业主评分多维考核,驱动服务优化。
-

诺怀物业工单系统工单流程自定义设置
三、实战案例:数字化工单系统的落地价值
案例1:重庆某物业公司的“智慧大脑”
-
E控中心:通过AIoT设备实时监测园区异常(如水压过低、消防通道堵塞),自动派单至最近工程师,28分钟完成故障修复。
-
防高空抛物系统:摄像头自动留存证据,精准定位责任人,纠纷率下降60%。
案例2:诺怀云智慧物业平台
-
投诉闭环管理:线上投诉一键转办、限时处理、全程跟踪,实现“件件有落实”。
-
三费透明化:物业费、公共收益、维修资金在线可查,业主信任度提升40%。
四、未来展望:从“工具”到“生态”的进化
-
AI+IoT深度融合:设备故障自诊断、无人机巡检、机器人辅助维修。
-
社区治理联动:与政府监管平台数据互通,推动行业标准化。
-
碳足迹追踪:通过工单数据优化能源消耗,助力绿色物业。
结语:物业工单系统的“三重价值”
-
对业主:报修像点外卖一样透明,服务体验从“焦虑等待”变为“安心可控”。
-
对物业:人力成本降低25%,工单处理效率提升2.8倍。
-
对行业:推动物业管理从“劳动密集型”向“数据驱动型”转型,构建共建共治新生态。
数字化不是选择题,而是物业未来的必答题。 唯有拥抱技术,方能破解顽疾,让物业服务真正成为社区的“温暖纽带”。
延伸阅读:

















 869
869

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









