 多模态大模型交通分析系统
多模态大模型交通分析系统





温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
信息安全/网络安全 大模型、大数据、深度学习领域中科院硕士在读,所有源码均一手开发!
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助更多的人
介绍资料
以下是一篇关于《Python + 多模态大模型车辆轨迹识别与目标检测分析系统》的开题报告框架及内容示例,供参考:
开题报告
题目:Python + 多模态大模型车辆轨迹识别与目标检测分析系统设计与实现
一、研究背景与意义
- 背景
- 交通管理需求:随着城市交通流量激增,传统监控系统依赖人工分析效率低下,亟需自动化技术实现车辆轨迹识别与异常行为检测。
- 多模态技术趋势:单一传感器(如摄像头)易受光照、遮挡影响,而融合视觉、雷达、GPS等多模态数据可提升系统鲁棒性。
- 大模型赋能:基于Transformer架构的多模态大模型(如CLIP、ViT-LSTM)能够同时处理图像、文本、时序数据,为车辆轨迹预测和目标检测提供新范式。
- Python生态优势:Python拥有OpenCV、PyTorch、TensorFlow等丰富库支持,可快速实现算法原型开发与部署。
- 意义
- 理论意义:探索多模态大模型在交通场景中的融合方法,填补传统目标检测与轨迹预测的割裂研究空白。
- 实践意义:提升交通监控系统的智能化水平,辅助事故预警、拥堵分析和自动驾驶决策。
二、国内外研究现状
- 车辆目标检测研究
- 传统方法:HOG+SVM、DPM等依赖手工特征,泛化能力差;
- 深度学习方法:YOLOv8、Faster R-CNN等在公开数据集(如KITTI、BDD100K)上达到90%+的mAP,但缺乏多模态输入支持。
- 车辆轨迹预测研究
- 基于物理模型:如社会力模型(Social Force Model),但无法处理复杂交互场景;
- 基于深度学习:LSTM、Transformer用于时序建模,但多数研究仅使用单一视觉或GPS数据。
- 多模态大模型应用
- CLIP模型实现图像-文本对齐,但未针对交通场景优化;
- TransFuser等模型融合LiDAR与摄像头数据,提升自动驾驶感知能力,但计算资源需求高。
- 现有不足
- 传感器数据融合策略简单(如加权平均),未充分挖掘模态间关联;
- 大模型轻量化不足,难以部署至边缘设备;
- 缺乏端到端系统设计,算法与实际交通场景需求脱节。
三、研究目标与内容
- 研究目标
- 设计并实现基于Python的多模态大模型系统,完成车辆目标检测、多传感器数据融合及轨迹预测,支持实时分析与异常事件报警。
- 研究内容
- 多模态数据采集与预处理:
- 融合摄像头(视觉)、毫米波雷达(速度/距离)、GPS(位置)数据,设计数据对齐与去噪算法;
- 使用OpenCV进行图像增强,PyTorch Geometric处理图结构化的传感器关系。
- 多模态大模型设计:
- 主干网络:采用ViT(Vision Transformer)提取视觉特征,结合1D-CNN处理雷达时序信号;
- 跨模态交互:设计交叉注意力机制(Cross-Attention)融合视觉与雷达特征,输出统一的多模态表示;
- 任务分支:
- 目标检测分支:基于DETR(Detection Transformer)实现端到端车辆检测;
- 轨迹预测分支:使用Transformer解码器生成未来5秒轨迹,引入社会注意力(Social Attention)建模车辆间交互。
- 系统功能模块:
- 实时检测模块:支持多路视频流并行处理,帧率≥15FPS;
- 轨迹分析模块:可视化车辆运动轨迹,计算速度、加速度等指标;
- 异常检测模块:基于规则(如超速、逆行)和模型(如孤立森林)识别异常行为。
- 轻量化部署优化:
- 使用TensorRT加速模型推理,量化感知训练(QAT)降低模型体积;
- 开发Flask RESTful API,支持边缘设备(如Jetson AGX Xavier)部署。
- 多模态数据采集与预处理:
四、研究方法与技术路线
- 方法
- 数据驱动:基于公开数据集(如nuScenes、Argoverse)和自建数据集训练模型;
- 对比实验:与单模态模型(如YOLOv8仅视觉)、传统方法(如Kalman滤波轨迹预测)对比性能;
- 系统集成:采用微服务架构,分离数据采集、模型推理、可视化模块,提升可维护性。
- 技术路线
数据采集 → 多模态预处理 → 大模型训练 → 系统集成 → 边缘部署 → 性能测试- 开发工具:
- 深度学习框架:PyTorch 2.0 + Lightning;
- 数据处理:Pandas + NumPy;
- 可视化:Matplotlib + Plotly + Open3D(3D轨迹展示);
- 部署:Docker + Kubernetes(集群管理)。
- 开发工具:
五、预期成果与创新点
- 预期成果
- 完成多模态大模型系统开发,目标检测mAP@0.5≥85%,轨迹预测ADE(平均位移误差)≤1.2米;
- 在边缘设备上实现实时推理(延迟<200ms);
- 申请1项软件著作权,发表1篇核心期刊论文。
- 创新点
- 多模态融合创新:提出动态权重交叉注意力机制,自适应调整视觉与雷达特征的贡献度;
- 端到端轨迹预测:摒弃传统“检测+跟踪+预测”三阶段流程,直接从多模态输入生成轨迹;
- 轻量化设计:通过知识蒸馏将大模型压缩至10%参数量,保持90%以上精度。
六、研究计划与进度安排
| 阶段 | 时间 | 任务 |
|---|---|---|
| 需求分析 | 第1-2周 | 调研交通监控场景需求,确定数据源与性能指标 |
| 数据准备 | 第3-4周 | 标注自建数据集,预处理nuScenes等公开数据 |
| 模型开发 | 第5-8周 | 实现多模态主干网络、交叉注意力模块,训练目标检测与轨迹预测模型 |
| 系统集成 | 第9-10周 | 开发Flask API,集成数据采集、推理、可视化模块 |
| 优化部署 | 第11-12周 | 模型量化、TensorRT加速,边缘设备测试与调优 |
七、参考文献
- Carion N, et al. End-to-End Object Detection with Transformers[C]. ECCV 2020.
- Giuliari F, et al. Transformer Networks for Trajectory Forecasting[C]. ICPR 2021.
- Liu Z, et al. Swin Transformer: Hierarchical Vision Transformer using Shifted Windows[C]. ICCV 2021.
- nuScenes数据集官网. https://www.nuscenes.org/
- PyTorch官方文档. https://pytorch.org/docs/stable/
八、指导教师意见
(待填写)
备注:
- 可根据实际条件调整模型结构(如替换ViT为Swin Transformer以降低计算量);
- 建议补充具体硬件选型(如摄像头型号、雷达参数)以增强实验可复现性;
- 需重点说明多模态数据的时间同步策略(如PTP协议或软件插值)。
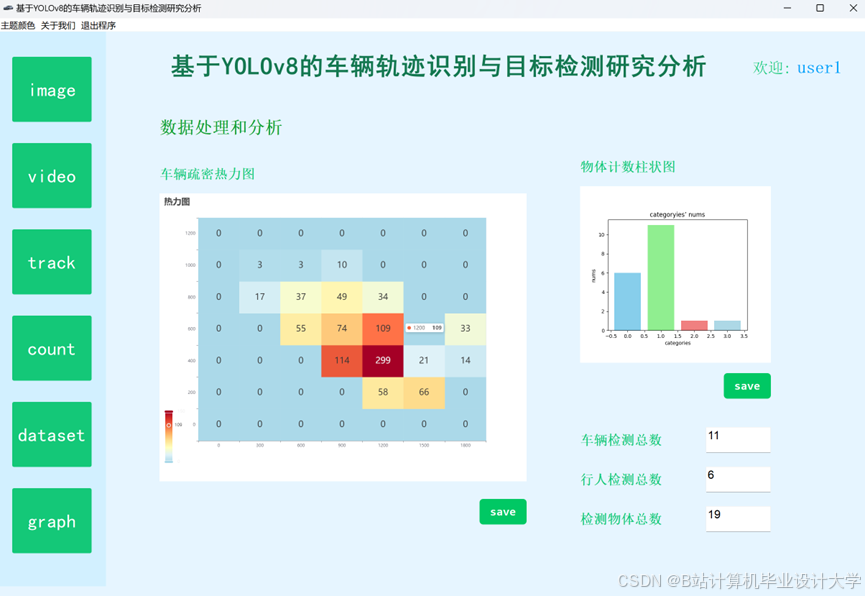
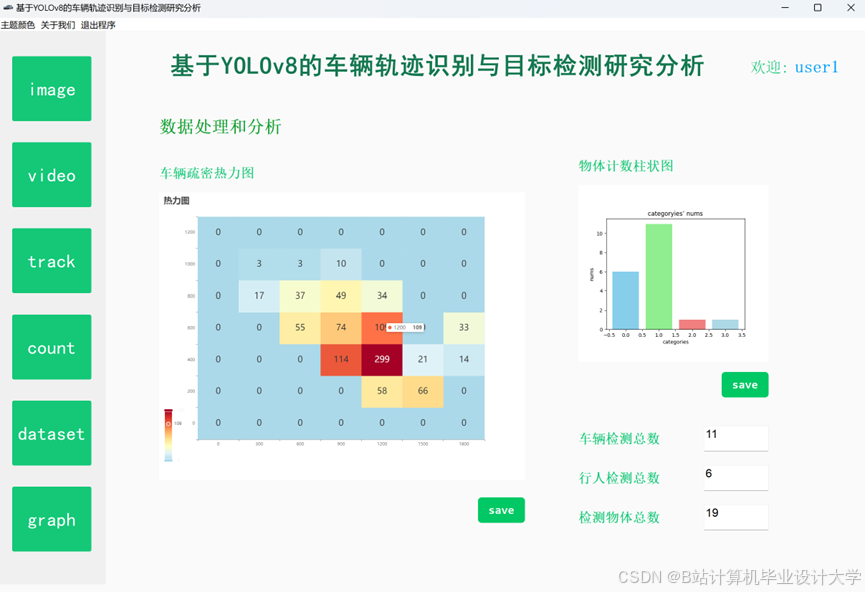
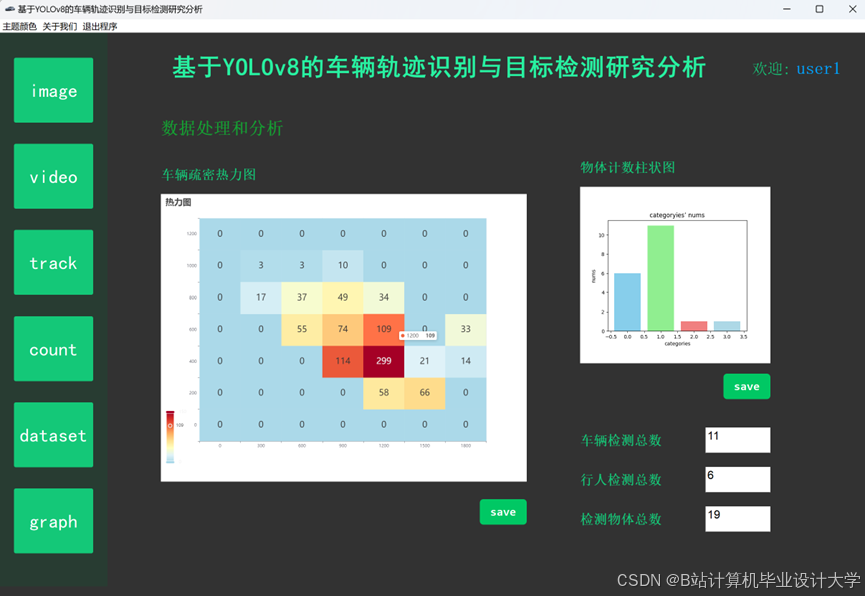
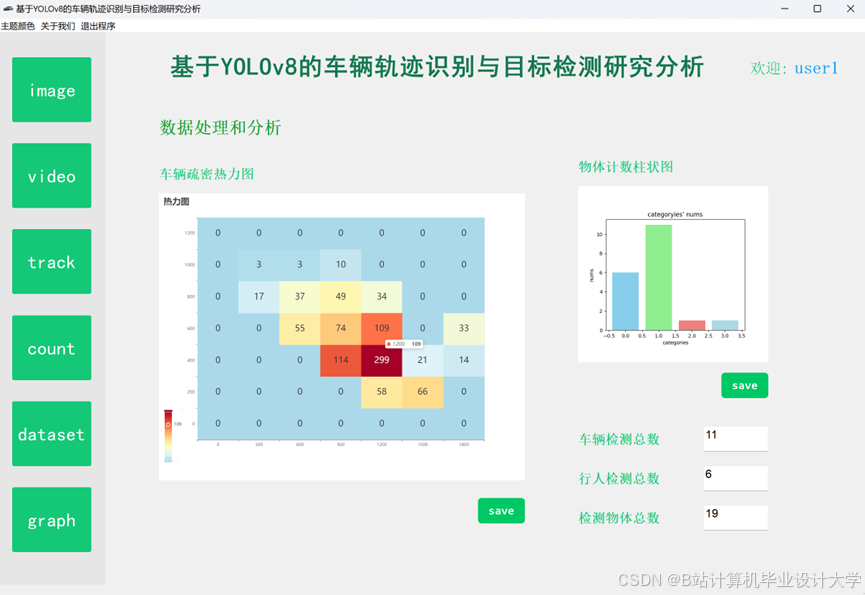
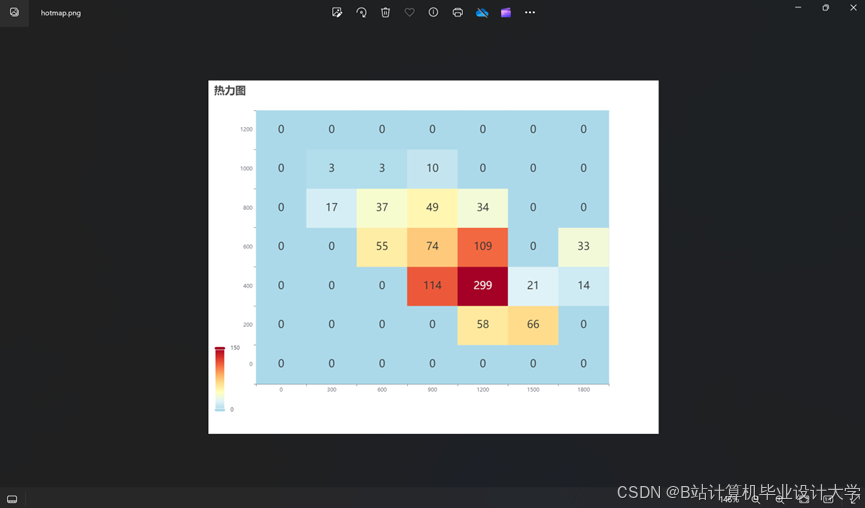
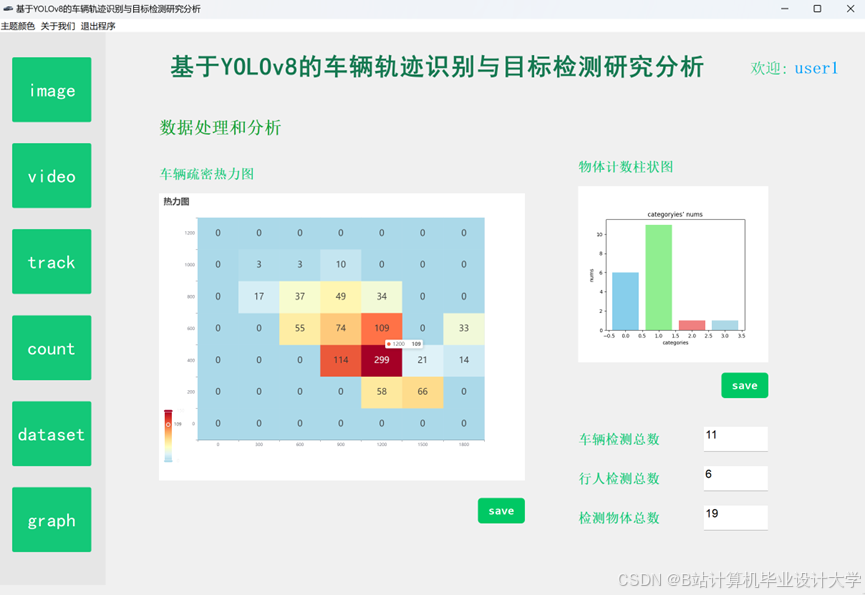
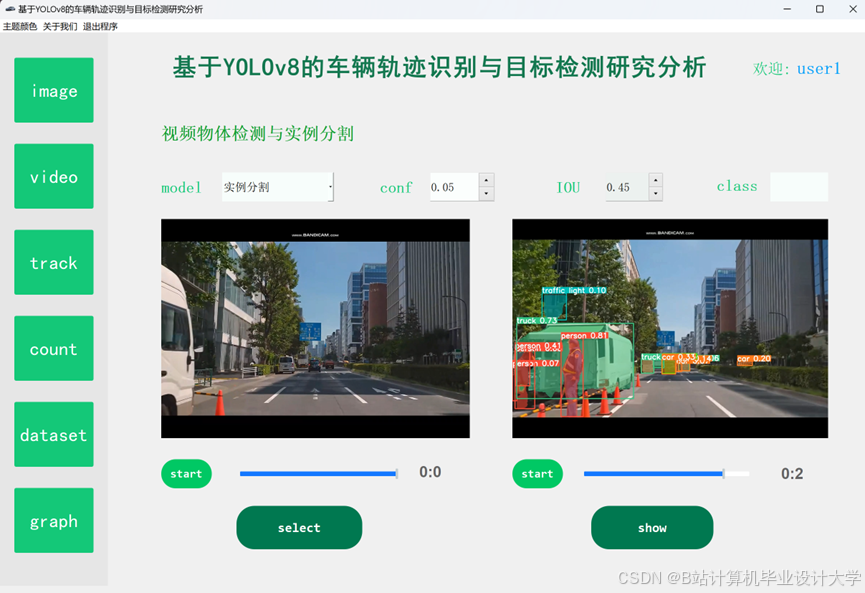
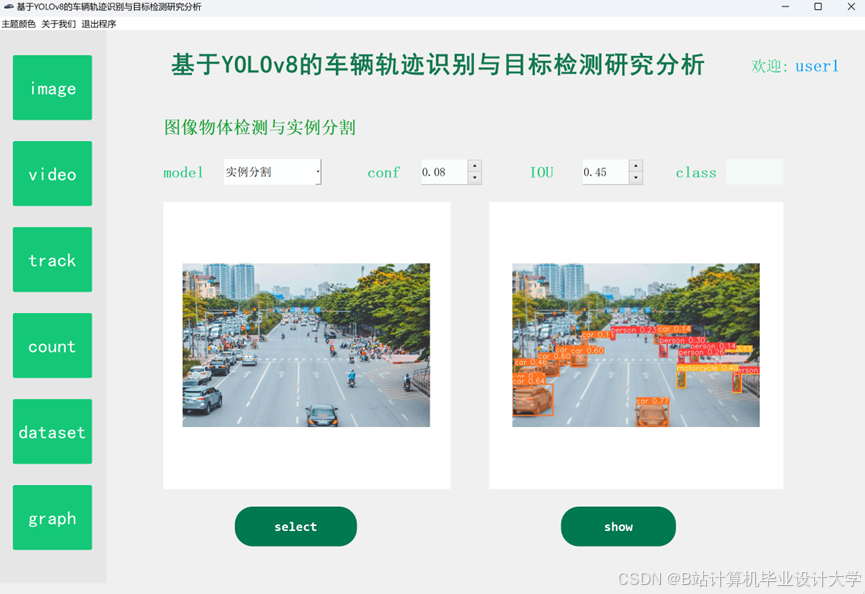
运行截图










推荐项目
上万套Java、Python、大数据、机器学习、深度学习等高级选题(源码+lw+部署文档+讲解等)
项目案例










优势
1-项目均为博主学习开发自研,适合新手入门和学习使用
2-所有源码均一手开发,不是模版!不容易跟班里人重复!

🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目代码以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查看👇🏻获取联系方式👇🏻


















 1066
1066

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











