




 本文深入探讨数据结构核心,包括线性表、数组、链表、桶排序、基数排序、树、二叉查找树、平衡二叉树、B树、散列、堆、排序算法等,解析各数据结构的特点及应用场景。
本文深入探讨数据结构核心,包括线性表、数组、链表、桶排序、基数排序、树、二叉查找树、平衡二叉树、B树、散列、堆、排序算法等,解析各数据结构的特点及应用场景。
线性表
- 数据结构的物理形式
数组: 选择和搜索较快O(1), 插入和删除较慢O(n)
链表: 插入和删除较快O(1), 选择和搜索较慢O(n) - 桶排序: O(n+m) 其中m为桶的个数。每个桶是一个链表实现的线性表,链表尾部插入
- 基数排序:O((n+b)logb m) 其中b是基数,m为桶的个数。
- 基数排序在每一位上而不是整个数做桶式排序,位排序的顺序是低位优先,基于前面一趟的桶排序进行桶排序,最后顺序扫描各个桶得到有序输出
- 基数排序和桶式排序不同的地方:同一个桶中的数可以不同
- 堆栈的应用:符号平衡、后缀表达式求值、递归调用的实现
- 队列:FIFO队尾rear进或插入,队头front出或删除。为了防止队头队尾同时挤压到最后,最好使用循环链表。
树
-
节点的深度:根到节点的唯一路径的长(一般从1开始)
节点的高度:节点到它的树叶最长路径的长(一般从1开始)
树的高度和树的深度(类似于节点)
内部节点:非叶子节点 -
先序遍历应用:层次缩进打印目录内容
后序遍历应用:计算目录内容大小- 先序:根左右 中序:左根右 后序:左右根
- 后缀表达式->表达式树的方法:借助栈,扫描后缀表达式,若遇到数字,构造单节点树,入栈;若遇到操作符,从栈中弹出两棵树,以操作符为根,合并弹出的两棵树,将得到的树入栈。
-
二叉查找树BST
-
BST的Find操作 ---- 递归法,迭代法
-
BST的Insert操作---- 递归法,迭代法(迭代比较,直到对应分支为NULL,插入)
-
BST的删除操作
----没有左右子节点,可以直接删除
----存在左节点或者右节点,删除后将子节点挂到对应父节点上
----同时存在左右子节点,通过和后继节点交换后转换为前两种情况后继节点:当某个节点存在右节点时,后继结点就是右节点中的最小值,因此后继节点一定没有左节点。所以,后继结点有可能存在右节点,也有可能没有任何节点。由于后继结点最多只有一个子节点,因此通过交换后继节点再删除后,就变成了 3 种情况中的前两种
推荐:二叉查找树 - 删除节点 详解(Java实现)
代码实现: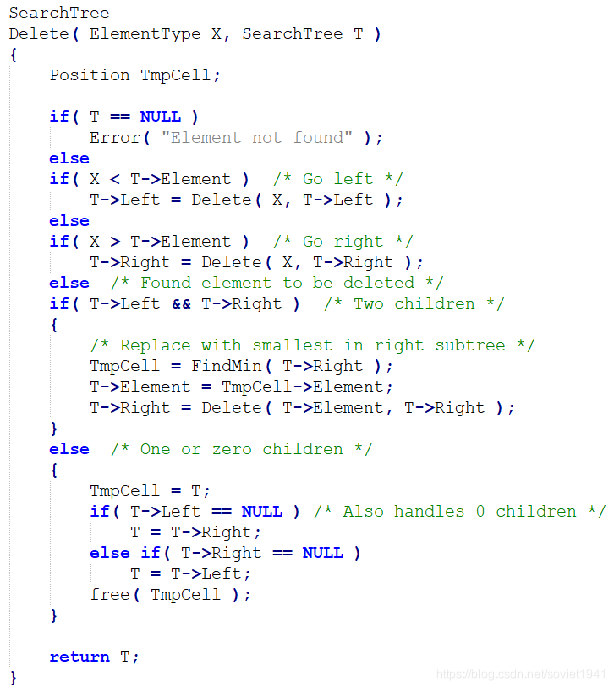
在平衡性良好的情况下,查找插入删除O(log n),最坏代价达到O(n)
-
-
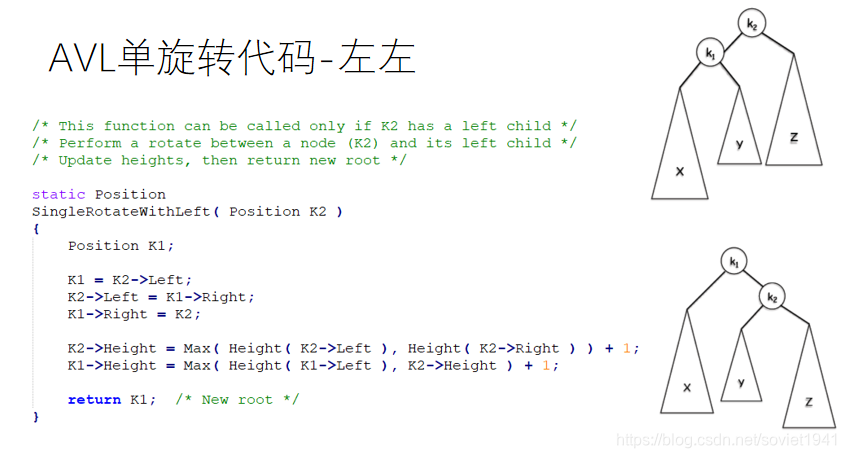
平衡二叉树AVL
平衡二叉树AVL是一种任意节点的左右子树深度或高度相差最多为1的BST,AVL树的高度最大为O(logN)-
4种不平衡情况
左儿子的左子树插入(左左)
右儿子的右子树插入(右右)
左儿子的右子树插入(左右)
右儿子的左子树插入(右左)
策略:1和2单旋转调整;3和4双旋转调整 -
示例:
在左左情境下,K2是搜寻出问题的节点。对于K2来说,先让他左膀的右臂成为他的左膀,再成为他左膀的右臂(2步操作)。双旋转示例(右左):
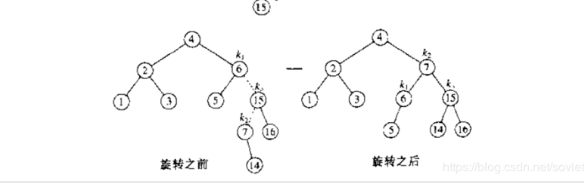
代码(右左):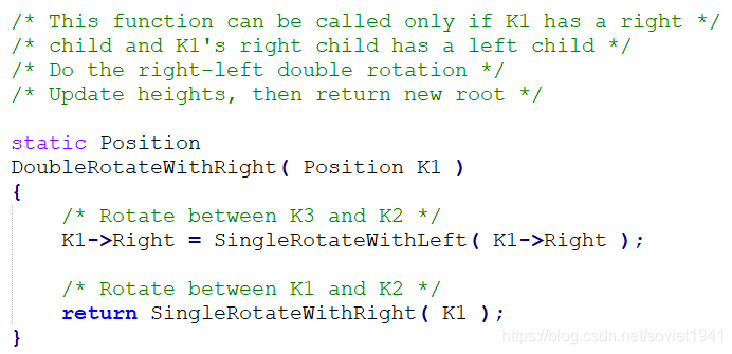
对于左右,先对右节点 右右处理,转化成左左;再进行左左处理
对于右左,先对左节点 左左处理,转化成右右;再进行右右处理
-
-
B树
- M阶B树满足树根有2到M儿子;非根内部节点最少有ceil(M /2)个儿子,最多有M个儿子。这里ceil代表向上取整 。有k个儿子的内部节点,有k-1个关键字,升序排列。B树的高度: O(logM N)。 插入和删除可以接近常数时间,从而减少磁盘I/O次数。
- 查找代价:O(logM N)
- 插入代价(一般):O(M) 最坏代价:O(MlogM N)
操作:由根向树叶查找,确定插入的树叶位置,插入。若树叶满,M+1关键字的节点分裂成floor((M+1)/2)和ceil((M+1)/2)个关键字的两个节点,父节点儿子树相应增加,可能一直分裂到根,从而增加B树的深度。//(我也不是很懂) - 删除最坏代价 :O(MlogM N)
散列
- 基本概念
哈希函数: 将元素转换成可以查找的整数关键字,将理论上无限的元素映射到有限的哈希表地址空间
哈希表:一种可以平均常数时间查找、插入和删除的数据结构
冲突:多个元素会映射到表中同一个位置 - 哈希性质
均匀哈希:每个关键字的探查序列等可能的是0-m-1中排列的任一种。
简单均匀哈希:任何一个给定元素等可能的哈希到m个单元中任意一个,且与其他元素哈希到什么位置无关。
哈希表大小的选择:最接近目标需求的素数
平均情况下,哈希表的查找、插入和删除性能是常数时间 - 冲突处理
-
分离链接法:将哈希到同一个单元的元素用链表连接起来
装填因子λ=元素个数n/哈希表的大小=链表的平均长度
平均情况分析(λ=O(1)):
不成功的查找: λ 次比较(1+λ)
成功查找平均情况:1+λ/2(1+λ)
插入:1+λ
删除:1+λ/2(1+λ)最坏情况分析(λ=O(N),所有元素哈希到同一链表,O(N))
不成功的查找O(N)
成功查找O(N)
插入O(N)
删除 O(N) -
开放寻址法
- 线性探测
- hi(k) = h(k) + i,只要表未满,线性探测保证元素可插入。
哈希单元三种状态:空、删除和有效占用位置。删除标记的单元可以插入元素,可以继续往下查找。 - 插入和不成功查找的期望探测次数为:(1+1/(1-λ)²)/2。
成功查找的期望探测次数为:(1+1/(1-λ))/2,比不成功次数少。 - 随机探测,不成功查找的期望探测次数(找到一个空单元)为:1/(1-λ)。
- hi(k) = h(k) + i,只要表未满,线性探测保证元素可插入。
- 二次探测(平方探测)
hi(k) = h(k) + i², h(k) = k % 10。即使表未满,二次探测下的插入也可能失败。- 二次探测定理:表至少有一半是空的时候,总能插入一个新的元素
- 线性探测
-
- 再散列
当负载因子达到一定程度(或插入失败时),例如0.5,创建一个2倍大小的新哈希表,使用一个新的相关哈希函数将旧哈希表中的元素放到新哈希表中。代价为O(n)。
堆
1. 优先队列
优先队列的出队基于元素的优先级,优先级最小或最大的元素先出队。按照类别可分为:最小优先队列(优先级最小的先出队,默认),最大优先队列(优先级最大的先出队):堆排序。
2. 二叉堆
二叉堆是实现优先队列的一种重要方法。
分类:最小堆(最小优先队列)和最大堆(最大优先队列)
基本性质:
结构性:完全二叉树;
堆序性:任意节点小于(或大于)它的后裔;每颗子树都是一个堆。
1. 堆的初始化
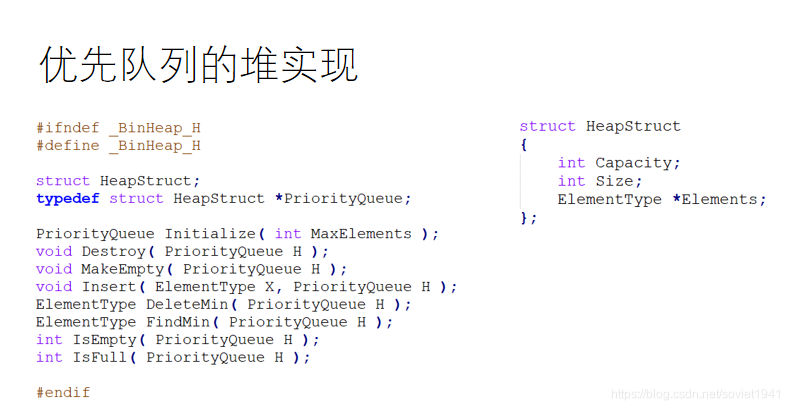
其中,堆结构体里定义了堆的数组,大小和容量。在建堆时,堆的数组大小要比最大容量大一,因为要在数组的0位置设置一个哨兵元素,方便插入操作。
2. 插入(入队)
将新插入的元素放到堆尾。若新插入的元素比父亲大,父亲下沉,新插入元素上滤,直到比父亲大为止 。最坏情况下的代价:O(logN)
3. 删除(出队)
删除树根,两棵子树是二叉堆,但结构性破坏。将二叉堆最后的元素放入树根,结构性质、满足,堆序破坏。将新的树根和两个儿子比较,若有儿子大,大的儿子上升,新根下滤,直到比所有儿子小为止。 最坏情况下的代价:O(logN)
4. 构建堆
自顶而下的建堆方式:从根结点开始,把结点一个个插入堆中。当把一个新的结点插入堆中时,需要对结点进行调整,以保证堆依然是大根堆。时间复杂度为O(logN)。
自下而上的建堆方式:从最后一个内部节点直到根进行堆序性质维护。操作N次,时间复杂度为O(N)。
3. 堆排序
思想:将N个元素构建一个最大堆
重复N-1次以下过程:
1 将堆顶元素(最大元素)和堆中最后的元素交换
2 堆的大小减1
3 维护堆使得满足最大堆性质
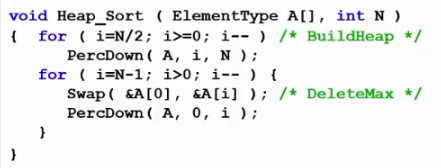
其中,PercDown指的是下滤,即维护堆。上面的初始化堆代价为O(N),下面的删除后维护代价为O(logN),总的时间复杂度为O(NlogN)。
排序
稳定性:任意两个相等的数据,在排序前后相对位置不改变。
冒泡排序
- 最好代价O(N),最坏代价O(N²),平均代价O(N²)。
- 具有稳定性。
插入排序
- 维护一个有序区。
- 最好代价O(N),最坏代价O(N²),平均代价O(N²)。
- 具有稳定性。
基于相邻元素两两交换的排序每次只能消除一对逆序对,平均代价和最坏代价均为O(N)。
希尔排序
- 减小增量序列,对每个增量序列进行插入排序。
- 平均时间代价小于O(N²),约等于O(logN)。最坏代价达到O(N²)。
- 使用Hibbard增量的希尔排序每次增量为2^k-1,保证增量序列之间互质,最坏时间代价约为O(N ^ 2/3)。
- 希尔排序是不稳定的。
堆排序
见上一节
归并排序
- 合并子程:设置三个指针,进行判断和移动。需要额外空间。时间复杂度O(N)。
- 递归的算法:先划分成两个子问题,再进行合并。需要额外空间,总时间复杂度O(NlogN)。
- 归并排序是稳定的。
快速排序
- 时间复杂度O(logN),最坏情况为O(N^2)
- 操作流程:首先选取一个pivot,作为分割的参考值。比它小的放到左边,比它大的放到右边。选取pivot的方法常用三数取中值,最后将中值放到right -1的位置。
在某一次特定的递归时,用两个指针进行比较,左边大于右边小于时交换。当右指针小于左指针时停止,并将pivot和左指针交换。 - 快排缺点:需要大量堆栈空间。因此,在数据量小时,常采用插入排序。
- 快速排序是不稳定的。
图
图的表示
- 图的邻接矩阵表示:简单直观,方便统计出度和入度。但在稀疏图情况下浪费时间和空间。
- 邻接链表表示:在稀疏图情况下节省时间空间,但在稠密图情况下浪费时间空间。此外,邻接链表不方便统计节点的入度,需要额外构建逆邻接链表。
图的遍历
- DFS深度优先搜索
类似于树的先序遍历。沿着一条路走下去,然后逐层检测逐层退出。空间存储类似于堆栈。
void DFS(Vertex V){
visited[V] = true;
for(V的每个邻接点W){
if(!visited[W]){
DFS(W);
}
}
}
时间复杂度:邻接表 O(N+E)
邻接矩阵O(N^2)。
- BFS广度优先搜索
类似于树的层序遍历。遍历每一层的节点压入优先队列,弹出时再压入其邻接节点。如此循环完成每一层的遍历。
void BFS(Vertex V){
visited[V] = true;
Enqueue(V,Q);
while(!isEmpty(Q)){
V = Dequeue(Q);
for(V的每个邻接点W){
if(!visited[W]){
visited[W] = true;
Enqueue(W,Q);
}
}
}
}
时间复杂度:邻接表 O(N+E)
邻接矩阵O(N^2)。
拓扑排序
- 拓扑序:如果从V到W有一条有向序列,那么在排序里V一定在W之前。合理的拓扑序必定是一个有向无环图。
- 操作过程:每次找出入度为0的节点,将其输出,并把所有与之相邻的节点入度减一(相当于删去这个点)。如果循环还未结束已经找不到p入度为0的节点,则说明这个图里有环。
void TopSort(){
int cnt = 0;
for(图中每个顶点V){
if(Indegree[V] == 0)
Enqueue(V,Q);
}
while(!isEmpty(Q)){
V = Dequeue(Q);
输出V
cnt++;
for(V的每个邻接点W){
if(--Indegree[W] == 0)
Enqueue(W,Q);
}
}
if(cnt != |V|)
Error("图中有回路");
}
时间复杂度: O(N+E)

















 6468
6468

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









