







[论文笔记] NAS-FPN: Learning Scalable Feature Pyramid Architecture for Object Detection(CVPR19)
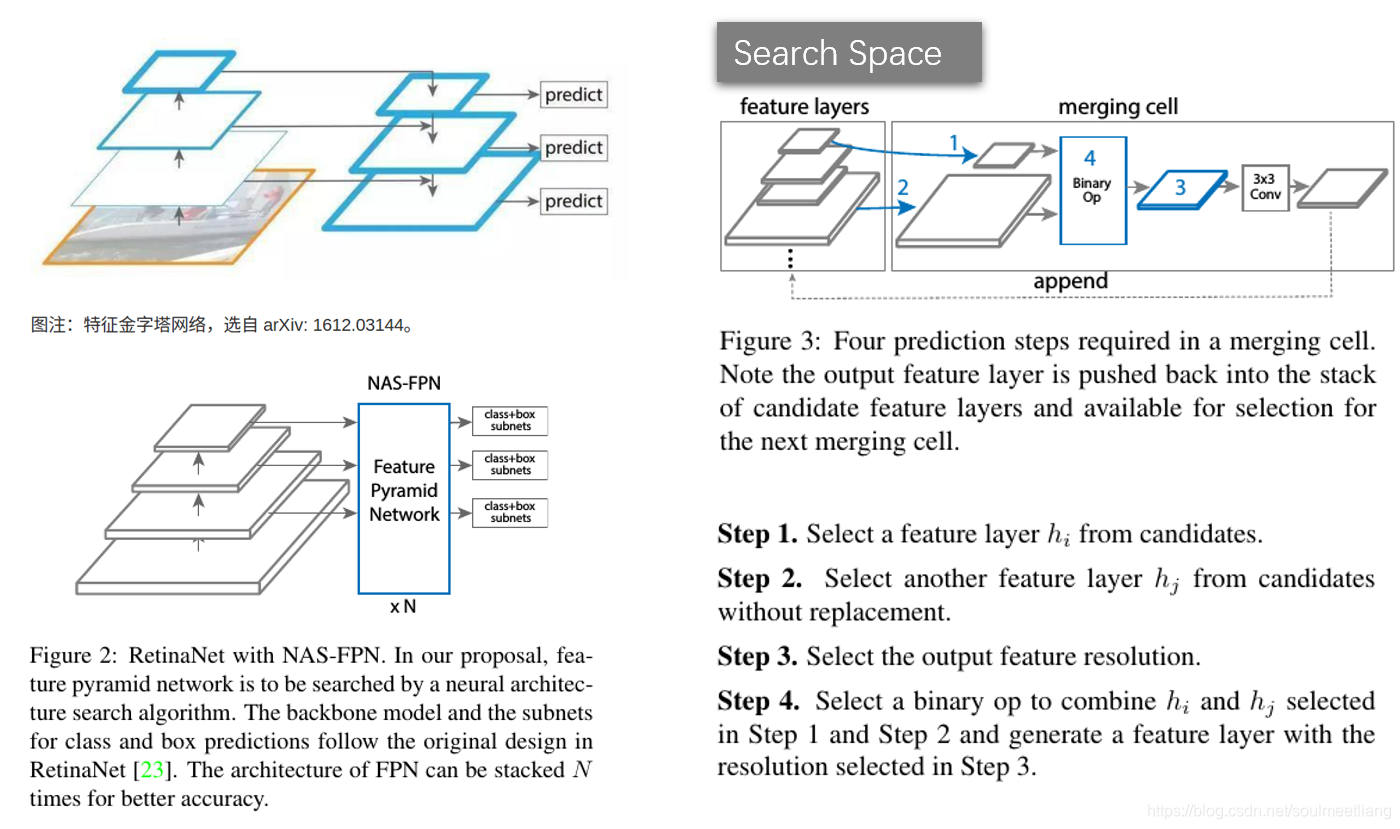
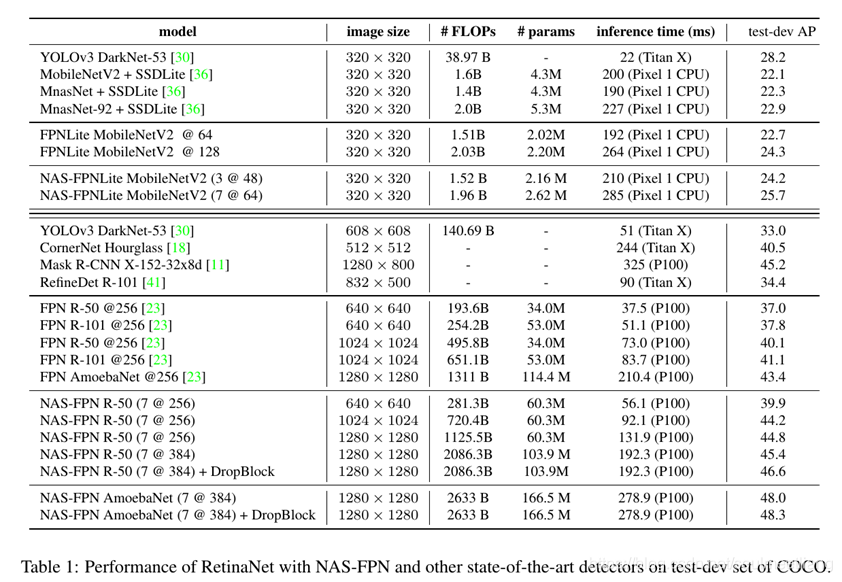
 本文介绍了CVPR19上的一篇论文——NAS-FPN,该研究通过神经架构搜索(NAS)学习了一个适用于对象检测的可缩放特征金字塔架构,提升了检测性能。
本文介绍了CVPR19上的一篇论文——NAS-FPN,该研究通过神经架构搜索(NAS)学习了一个适用于对象检测的可缩放特征金字塔架构,提升了检测性能。
[论文笔记] NAS-FPN: Learning Scalable Feature Pyramid Architecture for Object Detection(CVPR19)

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章






















