



在进行装配体操作时,如配合、测量重心等,经常需要利用装配体原点及三个基准面。有时会遇到第一个固定零部件的位置不与原点重合,或者装配完成后需要更改与原点重合的零部件位置却无从下手的情况。这些问题大多可以通过调整放置方式或后续修改位置来解决。
一、快速原点对齐技巧
在装配开始时,选择第一个零部件的位置时,不必急于点击放置位置,而是直接点击“开始装配体”下的“确定”按钮。这样,该零部件的原点位置将自动与装配体原点位置重合,并处于固定状态。
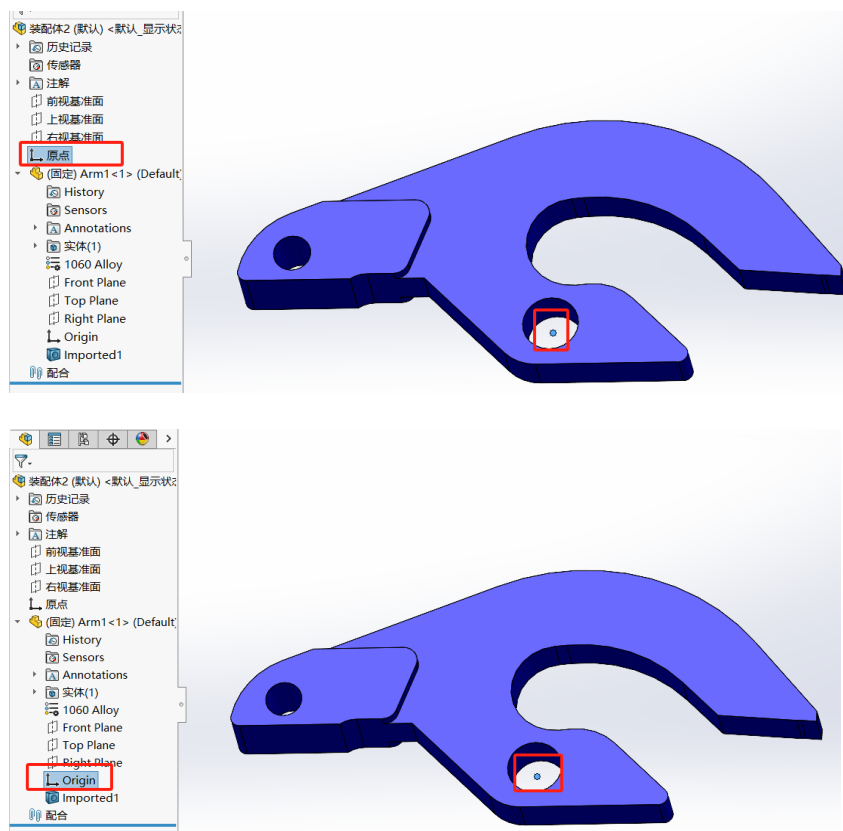
固定状态说明:第一个放置的零部件无论选择哪一个,都将自动处于固定状态,且无法移动。固定状态下的零部件无法进行配合操作。
二、零部件状态调整
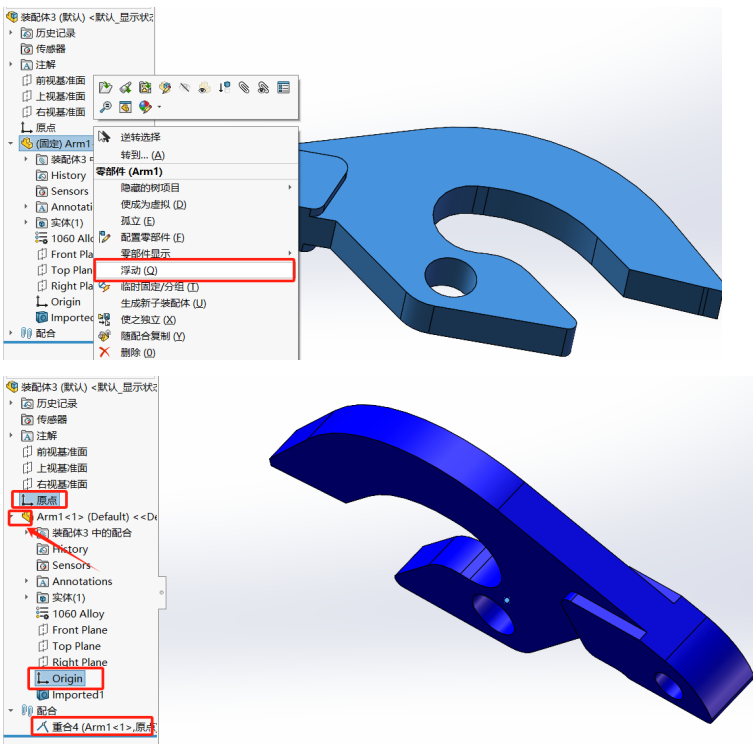
固定与浮动转换:固定状态的零部件可以通过调节转换为浮动状态,浮动状态下的零部件可以自由移动。同样,浮动状态的零部件也可以设置为固定状态。在浮动状态下,可以方便地更改零部件的配合关系。
三、后续装配体放置的理解
理解了第一个零部件的放置原则后,后续的装配体放置就变得相对简单。
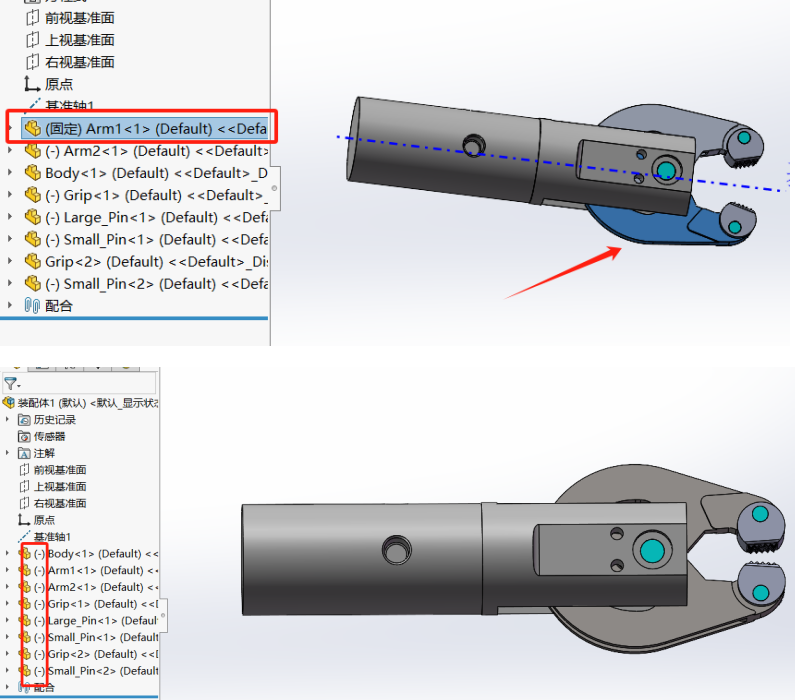
如果第一个零部件的放置忽略了放置关系,装配完成后发现该零部件作为固定件不合适,此时需要进行调整。
调整注意事项:
一般需要活动的零部件不会附加固定状态。
变换固定状态的零部件时,如果其配合关系受到影响,系统会给出提示,此时需要相应地更改配合关系。
四、合理选择固定零部件
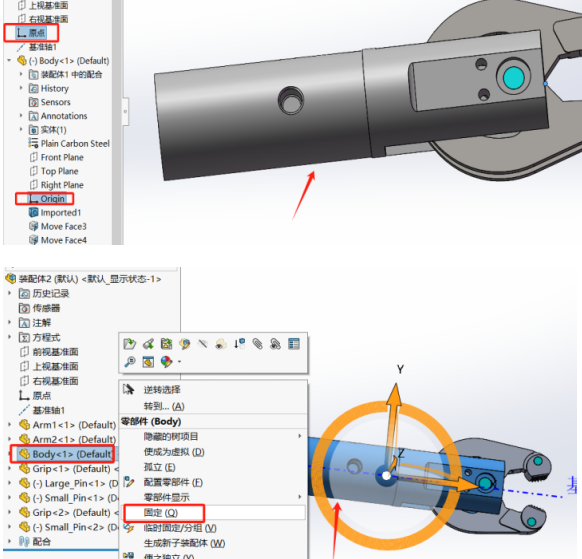
选择合适的零部件作为固定件,可以大大简化后期的配合工作。
同时,更改与装配体原点相关的方法也包含在其中。
操作建议:
在浮动状态下添加与原点的配合关系,并确保三个基准面的重合关系。
最终将零部件设置为固定状态,此时它将完全固定。
重心坐标等相关条件会随着原点的改变而变化。
五、固定部件的选择原则
选择哪些零部件作为固定部件或多个固定部件,应根据实际需求来决定,不一定要固定某一个特定的零部件。
但推荐将作为主体且不需要活动的零部件作为第一个放置的零部件。
优势:合理的第一零部件放置和固定状态利用,可以有效减少配合次数,使后期装配更加简单快捷。
通过遵循上述原则和技巧,可以更高效地进行装配体操作,提高工作效率。

















 1432
1432

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









