







训练神经网络
训练神经网络
激活函数
常见的激活函数有以下几种:
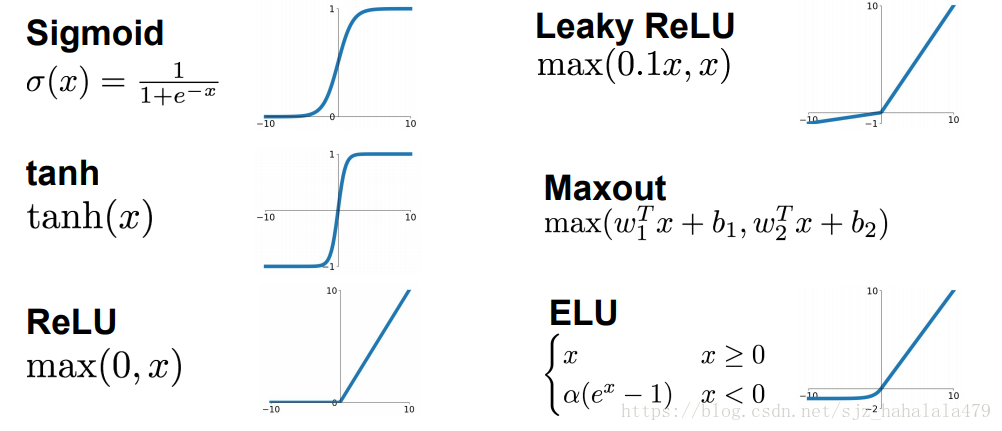
激活函数及对应导数
- sigmoid函数
函数形式: f ( x ) = 1 1 + e − x f(x) = \frac{1}{1+e^{-x}} f(x)=1+e−x1
函数导数: f ′ ( x ) = f ( x ) ( 1 − f ( x ) ) f'(x) = f(x)(1-f(x)) f′(x)=f(x)(1−f(x)) - tanh函数
函数形式: f ( x ) = e x − e − x e x + e − x f(x) = \frac{e^x - e^{-x}}{e^x + e^{-x}} f(x)=ex+e−xex−e−x
函数导数: f ′ ( x ) = 1 − ( f ( x ) ) 2 f'(x) = 1-{(f(x))}^2 f′(x)=1−(f(x))2 - relu函数:
函数形式: f ( x ) = m a x ( 0 , x ) f(x) = max(0, x) f(x)=max(0,x)
f ′ ( x ) = { 1 , x > 0 0 , x < = 0 f'(x) = \left\{ \begin{aligned} 1, x>0 \\ 0, x<=0 \\ \end{aligned} \right. f′(x)={1,x>00,x<=0
1 sigmoid函数
这个函数的表达式一般为:
θ
(
x
)
=
1
1
+
e
−
x
\theta(x) = \frac{1}{1+e^{-x}}
θ(x)=1+e−x1
它会将所有输入的
x
x
x值压缩到
(
0
,
1
)
(0,1)
(0,1)区间中;
曾经这个函数是标准的激活函数,很多研究都用它,因为它对生物中神经元的“放电率”有一个很直观的模拟。
但是作为激活函数,它存在以下几个问题:
- 神经元饱和(saturated neurons)问题。我们发现,当输入值过大或过小时,sigmoid的梯度很容易接近0。在我们的认知中,梯度过于接近0并不好,它会使我们的迭代变得十分缓慢。
- sigmoid的输出不是zero-centered的。
参考这两篇资料:
谈谈激活函数中以零为中心的问题
激活函数
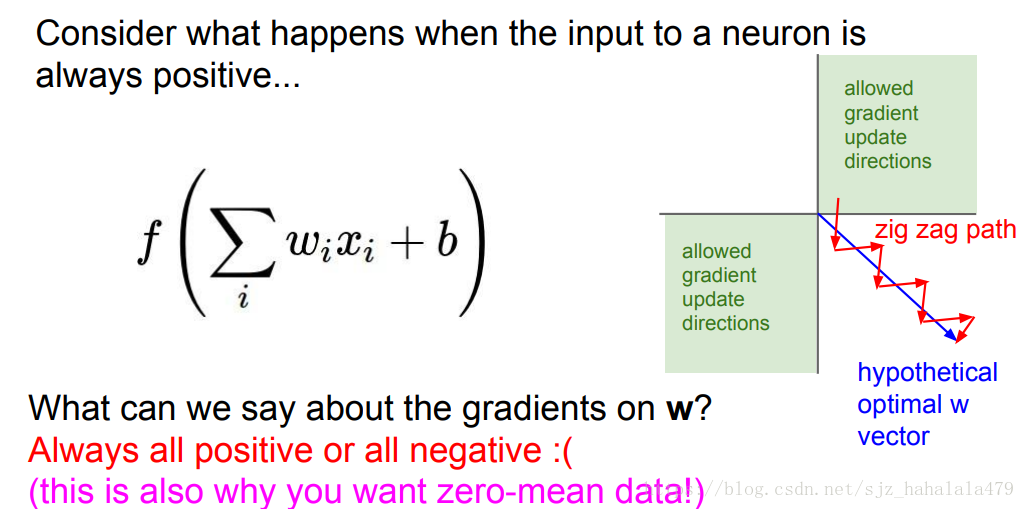
对一个神经元而言,假设它的输入 x x x都是正的,那么该神经元上权重 w w w的梯度会是什么样呢?
由链式法则,
w
w
w的梯度应该等于上游梯度times本地神经元的梯度。
∂
L
∂
w
=
∂
L
∂
f
⋅
∂
f
∂
w
\frac{\partial L}{\partial w} = \frac{\partial L}{\partial f} \cdot \frac{\partial f}{\partial w}
∂w∂L=∂f∂L⋅∂w∂f
之前有计算过,
w
w
w的本地梯度实际上就是输入
x
x
x
∂
L
∂
w
=
∂
L
∂
f
⋅
x
\frac{\partial L}{\partial w} = \frac{\partial L}{\partial f} \cdot x
∂w∂L=∂f∂L⋅x
也就是说,在
∂
L
∂
f
\frac{\partial L}{\partial f}
∂f∂L确定的情况下,
w
w
w梯度的符号由神经元的输入
x
x
x决定。
如果此时神经元的输入总为positive值,那么神经元的 w w w的梯度要不就都是正的,要不就都是负的。也就是说, w i w_i wi在更新值的时候,要不就是一起往变大的地方跑,要不就一起往变小的地方跑。如上图,假设 w w w是二维的, w w w更新的方向,就是第一象限方向和第二象限方向。
但是如果最优解的 w w w不是都往正或都往负呢?它可能是 w w w的某些维度是往正的,某些维度是往负的,就像图中所示向第四象限伸展的 w w w,这个 w w w希望它的 w x w_x wx维度增大,而 w y w_y wy维度减小;sigmoid就无法满足完全沿着这个方向更新梯度,它只能像z字型一样,一会往右一会往下,这样扭曲地更新。这样迭代很明显要比直接沿着 w w w的方向走要慢得多。
当然,以上的假设是基于我们输入的 x x x符号都一致的情况。我们可以通过数据预处理使输入 x x x符号不一致,这也是我们希望使用zero-mean data的原因之一。
- 第三个问题就是exp()操作比较computer expensive。这个问题其实并不大,因为之前的卷积操作实际上更computer expensive。
2 tanh函数
这个函数的表达式为
t
a
n
h
(
x
)
=
e
x
−
e
−
x
e
x
+
e
−
x
tanh(x) = \frac{e^x - e^{-x}}{e^x+e^{-x}}
tanh(x)=ex+e−xex−e−x
- tanh函数会将所有输入 x x x压缩到 [ − 1 , 1 ] [-1,1] [−1,1]。
- tanh函数的输出是zero-centered的,这是优于sigmoid的一点。
- 当输入较大或较小时,神经元依旧存在饱和问题。
3 ReLU函数
ReLU函数全称为Rectified Linear Unit,这个函数的表达式是
f
(
x
)
=
m
a
x
(
0
,
x
)
f(x) = max(0,x)
f(x)=max(0,x)
- 可以注意到在正区域,这个函数避免了神经元饱和的现象。
- 非常computationally efficient
- 在实践中,我们发现它的收敛速度比sigmoid/tanh快很多(大概快6倍)。
- 在生物学的角度上,神经元的激活函数实际上更像ReLU,而非sigmoid
ReLU的问题在于
- 输出不是zero-center的
- 当输入
x
≤
0
x \le 0
x≤0时,梯度全为0。
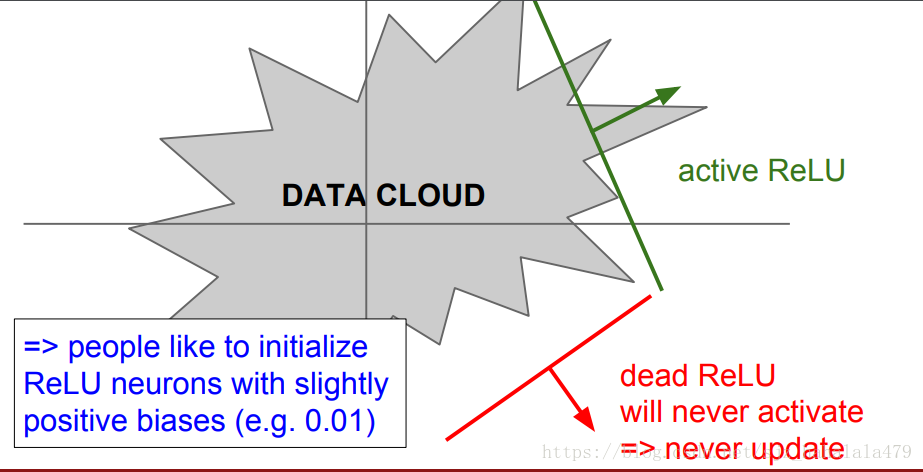
如果我们不能审慎地设计输入,使得输入全部 ≤ 0 \le 0 ≤0的话,那么神经元不会被激活, w w w的梯度值也不会更新,这个ReLU就叫做Dead ReLU。
为了解决标准ReLU的问题,有几种ReLU的变体:
4 Leakly ReLU
这个函数的表达式为:
f
(
x
)
=
(
0.01
x
,
x
)
f(x) = (0.01x,x)
f(x)=(0.01x,x)
这样的表达解决了负区域内的神经元饱和问题;
不会出现dead ReLU的情况。
5 PReLU
前缀
P
P
P的意思是Parametric参数的,函数表达式为
f
(
x
)
=
(
α
x
,
x
)
f(x) = (\alpha x, x)
f(x)=(αx,x)
刚刚的Leakly ReLU,其实就是
α
=
0.01
\alpha = 0.01
α=0.01的情况。
这里
α
\alpha
α这个超参数,可以通过训练神经网络,学到比较好的
α
\alpha
α。
5 Exponential ReLU (ELU)
这个函数也是ReLU的变体,
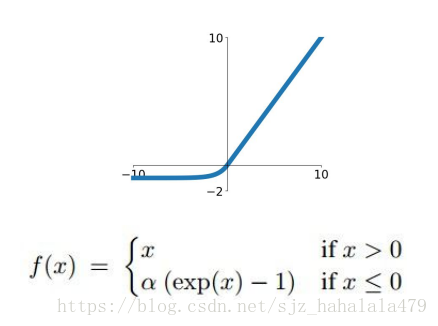
- 这个函数的输出接近于zero mean
- 和Leakly ReLU相比,ELU在负方向上也会存在神经元饱和的现象,有人说,这样的negative saturation regime可以增加对噪音的鲁棒性,在负方向上提供更健壮的反激活状态。
6 Maxout Neuron
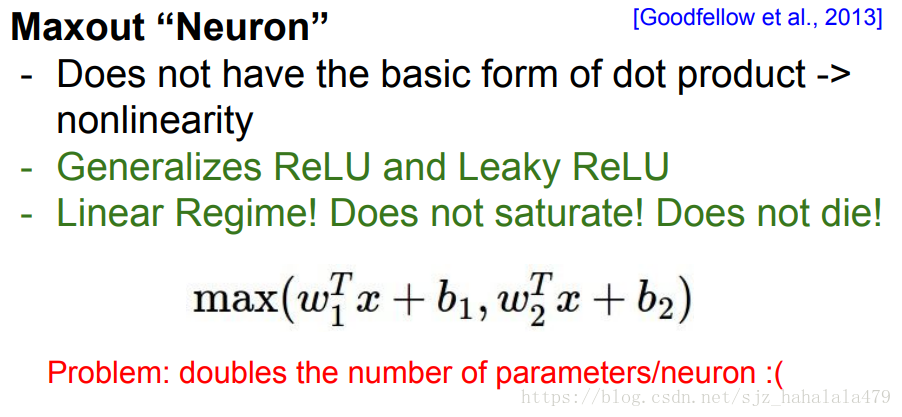
Maxout神经元相当于ReLU和Leakly ReLU的泛化。
因为这个神经元就是求取输入
w
i
x
i
+
b
w_ix_i+b
wixi+b的最大值。
当然这个神经元计算存在的问题就是会成倍地增加参数。
7 总结
- 主流上激活函数使用 R e L U ReLU ReLU
- 要谨慎地设置学习率
- 可以尝试使用Leakly ReLU 、 ELU 、Maxout,但是它们的使用更多是实验上的,而非实践中
- 可以尝试使用tanh,但是不要期待它会优化很多
- 现在不用sigmoid了!
数据预处理
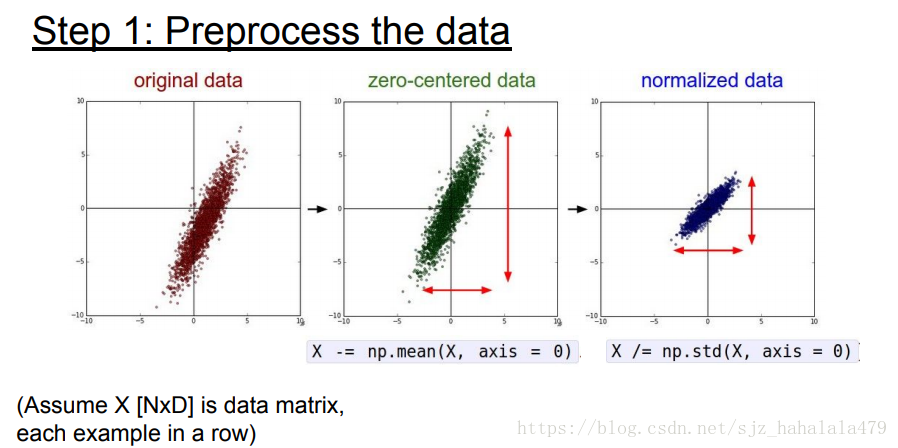
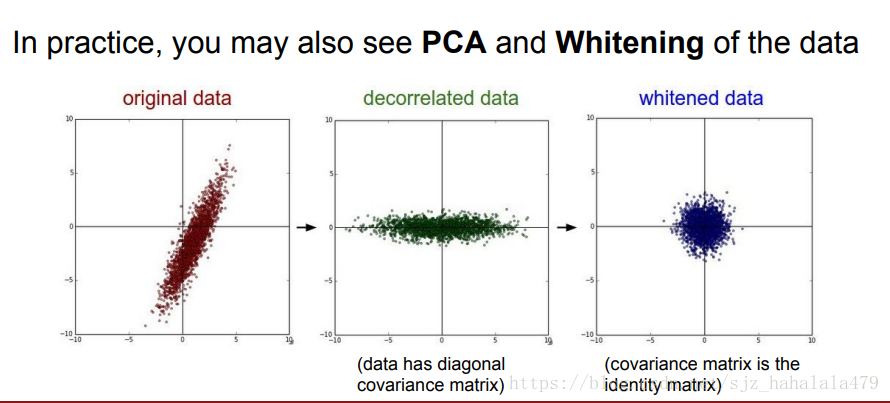
数据预处理,一般会使用mean方法使数据以0为中心;或者对数据做归一化;或者做PCA或者做whitening。但是对于图像数据,我们一般只做zero centered。
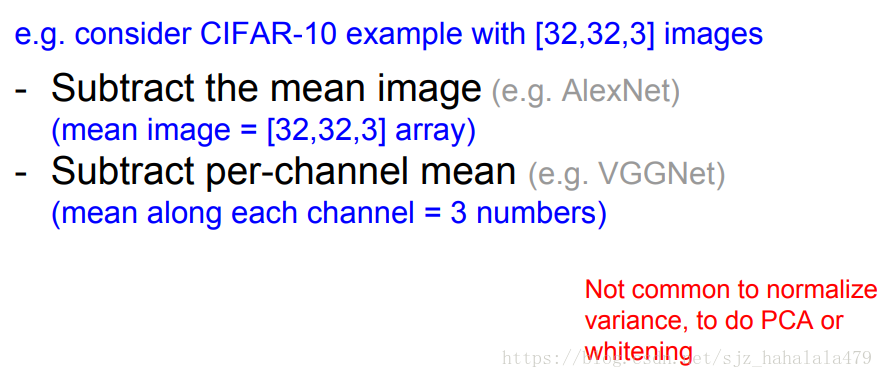
如图所示,有两种主流的做center的方法:
- 一种是将所有图像数据减去mean image。mean image是通过对所有训练的图像数据的每个像素点分别做均值得到的。
- 另一种方法是减去每个颜色通道的均值。
权重初始化
- 当我们的权重初始化为
0
0
0时,会发生什么?
最初的输入 w x + b wx+b wx+b的结果就是 b b b,对 b b b再使用激活函数,然后再传给下一层神经元,…,再反向传播,我们最后会发现,所有的神经元都做同样的工作,更新同样的梯度,输出同样的值,这并不是我们想要的,我们想要的是不同的神经元能学到不同的东西。 - What if 我们给权重随机初始化一些较小的值?
W = np.random.randn(D,H) * 0.01
这里我们是给W按照标准正态分布随机初始化了一些值。
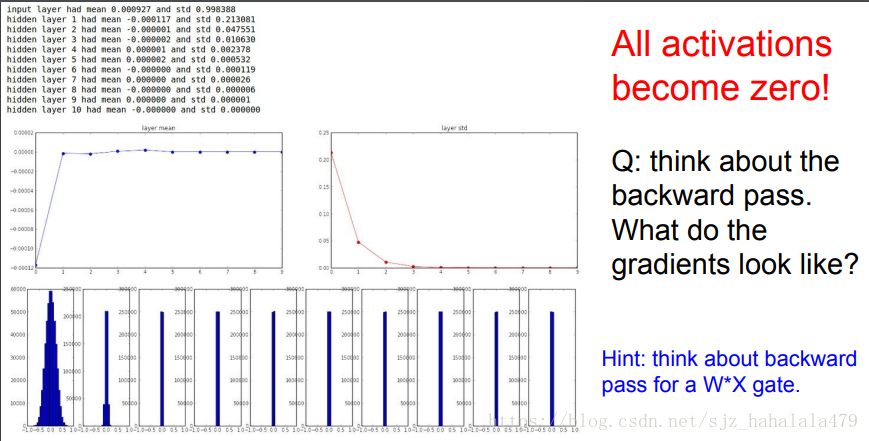
这样的初始化方法对小型网络是ok的,对深度网络就会出问题。
比如说以下这个例子,是10层,每层500个神经元的神经网络; w w w按照上述方式进行初始化。
import numpy as np
#assume some gaussian 10-D input data
D = np.random.randn(1000,500)
hidden_layer_size = [500]*10
nonlinearities = ['tanh']*len(hidden_layer_size)
act = {'relu':lambda x: np.maximum(0,x),'tanh':lambda x:np.tanh(x)}
Hs = {}
for i in range(len(hidden_layer_size)):
X = D if i == 0 else Hs[i-1] #input at this layer
fan_in = X.shape[1]
fan_out = hidden_layer_size[i]
W = np.random.randn(fan_in,fan_out) * 0.01 # layer initialization
H = np.dot(X,W) #matrix multiply
H = act[nonlinearities[i]](H)#nonlinearity
Hs[i] = H #cache result on this layer
#look at distribution at each layer
print('input layer had maen %f and std %f' % (np.mean(D),np.std(D)))
layer_means = [np.mean(H) for i,H in Hs.items()]
layer_stds = [np.std(H) for i,H in Hs.items()]
for i,H in Hs.items():
print('hidden layer %d had mean %f and std % f'%(i,layer_means[i],layer_stds[i]))
import matplotlib.pyplot as plt
plt.figure()
plt.subplot(121)
plt.plot(Hs.keys(),layer_means,'ob-')
plt.title('layer mean')
plt.subplot(122)
plt.plot(Hs.keys(),layer_stds,'or-')
plt.title('layer_std')
#plot the raw distributions
plt.figure()
for i,H in Hs.items():
plt.subplot(1,len(Hs),i+1)
plt.hist(H.ravel(),30,range(-1,1))
我们会发现没过几层,神经元的激活值都变为0了。第一层的数据分布还是一个比较合理的高斯分布值。过了一次迭代,数据值就都聚集在0附近了。
如果我们将权重值增大:
W = np.random.randn(D,H) * 1.0
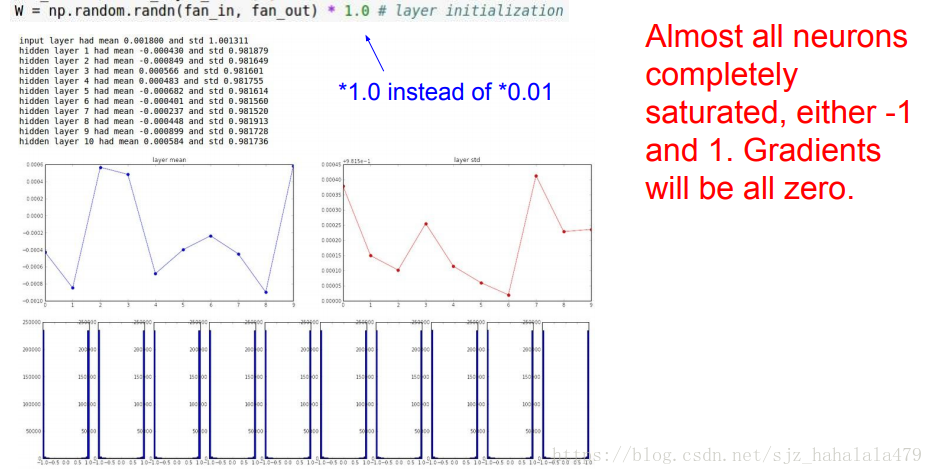
因为 × 1.0 \times 1.0 ×1.0相当于一个比较大的权重,根据 t a n h tanh tanh的性质我们发现当输入较大或较小时,输出的梯度会趋向于0。在图中也会发现所有的神经元貌似都饱和了,值都在-1或+1处聚集。梯度都接近0。
Glorot 等人在2010年提出了Xavier初始化方法:
W = np.random.randn(D,H) / np.sqrt(fan_in)
这个方法通过使输入方差=输出方差,来使得最终神经元的值分布尽量拟合高斯曲线。
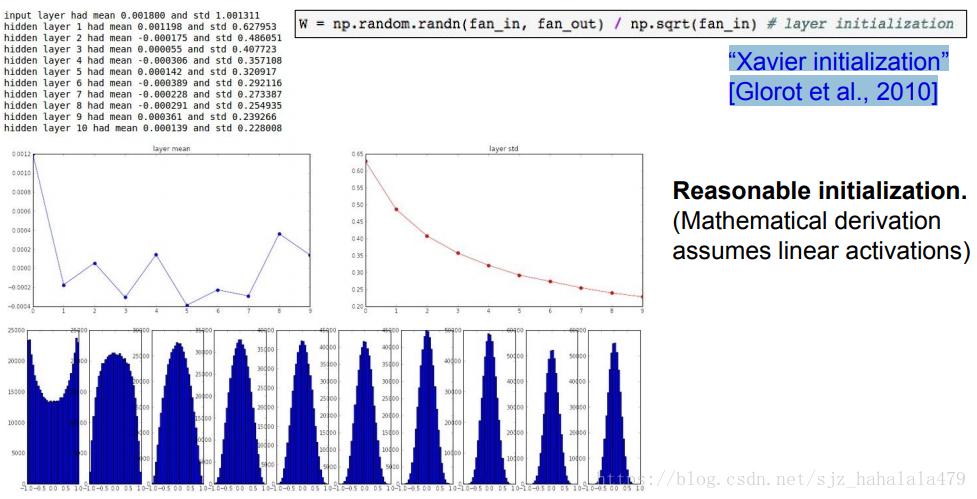
但是当激活函数是ReLU时,这个方法拟合的效果就不是很好。因为ReLU非中心对称的,且有一半的区域梯度为0。
这个时候可以使用
W = np.random.randn(D,H) / np.sqrt(2/fan_in)
来解决。(He et al., 2015)
现在如何合理地进行权重初始化依旧是活跃的研究领域。
批量归一化
翻译
a good spot 一个好的位置
从之前的权值初始化部分我们可以看出,如果不好好调整超参数,神经元的激活值会很奇怪,以至于无法达到学习的目的。
所以,Ioffe and Szegedy等人在2015年提出了Batch Normalization(批量归一化)这个概念,通过手动地归一化神经元的输出值,来使该层的神经元分布符合高斯分布。调整的方法是:
- 计算该层所有输出值得经验均值
- 计算该层所有输出值得标准差
- 应用 x ^ k = ( x ) k − E [ ( x ) k ] V a r [ ( x ) k ] \hat{x}^k = \frac{(x)^k - E[(x)^k]}{\sqrt{Var[(x)^k]}} x^k=Var[(x)k](x)k−E[(x)k]求得新的神经元输出。(注意这里求得的是标准正态分布,以零为中心的)。
我们可以把一个Batch Normalization层看做下层神经元的预处理步骤,也可以将其看做上层神经元的后处理步骤。BN层一般在全连接层或者标准卷积层后插入,在非线性神经元之前插入。
但是标准正态分布有时候可能并不是最好的数据拟合分布,它可能存在一些拉伸或偏移。所以提出者加入了两个超参数
γ
\gamma
γ 和
β
\beta
β,用来拟合有偏移的高斯分布。
y
(
k
)
=
γ
(
k
)
x
^
(
k
)
+
β
(
k
)
y^{(k)} = \gamma^{(k)}\hat{x}^{(k)} + \beta^{(k)}
y(k)=γ(k)x^(k)+β(k)
Batch Normalization的具体算法如图左所示:
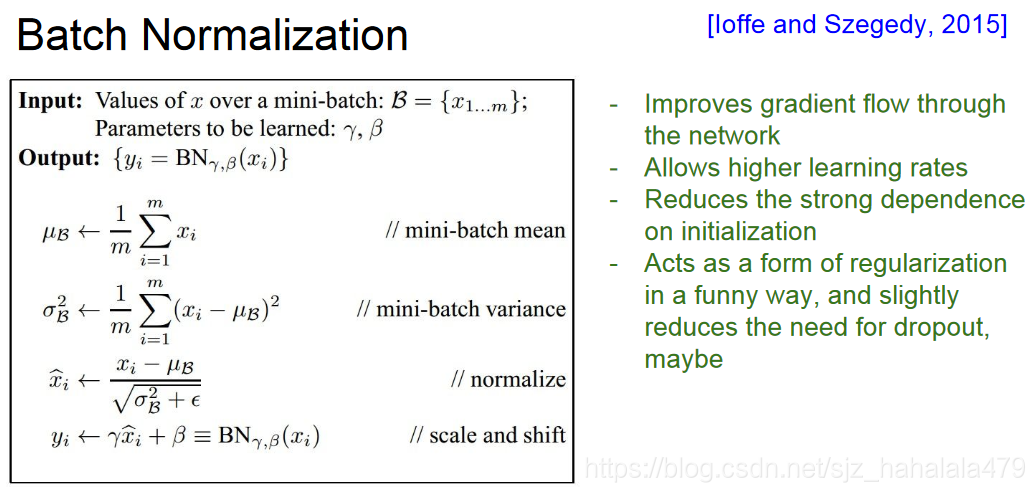
Batch Normalization的优势在于:
- 放松了我们对于初始化的依赖,我们可以使用更高的学习率
- 它有一点点像正则,也许用了它我们可以不用Dropout。
注意到,我们只在训练时更新BN层的均值和方差,在测试阶段,我们仍旧使用训练时的均值和方差。
监控学习过程
这一节主要是讲如何使整个神经网络的学习过程合理且可控。
- 第一步是预处理数据
- 第二步是选择架构
- 然后训练时我们要检查loss是否合理
首先我们将正则项设置为0,看看loss是不是符合我们定义好的规则;
然后我们稍微增大loss,看看loss有没有相应地变大;
接下来我们要调整学习率,我们调整好的学习率应该能使loss逐渐地变小;
当我们发现loss收敛地很慢时,要适当增大学习率;
当我们发现loss震荡甚至爆炸时,尤其是训练时我们发现NaN出现了,要减小学习率。
超参数优化
使用交叉验证的策略来进行超参数的优化
第一步:我们要在小数据上进行训练,只迭代几次,通过在小数据上训练来看看我们的网络有没有搭对(因为是小数据,所以当正则项为0时,loss也应该接近0),超参数合不合理。
第二步:我们要运行更长的时间,搜索更好地参数。
Random Search for Hyper-Parameter Optimization Bergstra and Bengio, 2012
搜索超参数的时候,使用Random Search比使用Grid Search。
优化算法
- SGD+Momentum 带动量的随机梯度下降
- Nesterov Momentum Nesterov动量
- AdaGrad Ada下降
- RMSProp
- Adam
- 正则化
- Dropout
- Data Augmentation 数据增益

















 1387
1387

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









