



 该文介绍了使用MATLAB进行车牌识别的过程,包括图像预处理、Prewitt算子边缘检测、数学形态学操作来定位车牌区域,并展示了从不同角度拍摄的车牌图片的识别结果。这种方法适用于角度适中、车牌较大的图片,但对倾斜或小车牌的识别效果有限。
该文介绍了使用MATLAB进行车牌识别的过程,包括图像预处理、Prewitt算子边缘检测、数学形态学操作来定位车牌区域,并展示了从不同角度拍摄的车牌图片的识别结果。这种方法适用于角度适中、车牌较大的图片,但对倾斜或小车牌的识别效果有限。
一.实现目标
不同角度拍摄包含车牌的图片,可识别车牌的位置。
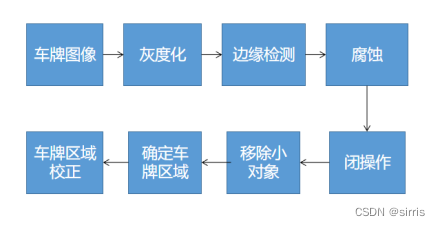
二.实现流程
采用matlab进行编程,对包含车牌图片进行预处理, 然后使用Prewitt算子进行边缘检测,接着运用数学形态学运算找出候选区域,最后定位出车牌区域并进行车牌区域的校正,具体实现流程如下图所示。
三.代码实现
I=imread('yuk.jpg');
figure(1),imshow(I);title('原图')
I1=rgb2gray(I);%功能是将真彩色图像转换为灰度图像,即灰度化处理
figure(2),subplot(1,2,1),imshow(I1);title('灰度图');
figure(2),subplot(1,2,2),imhist(I1);title('灰度图直方图');
I2=edge(I1,'Prewitt',0.15,'both');
%功能是采用I作为它的输入,并返回一个与I相同大小的二值化图像BW,在函数检测到边缘的地方为1,其他地方为0
figure(3),imshow(I2);title(' Prewitt算子边缘检测')
se=[1;1;1];
I3=imerode(I2,se);%腐蚀
figure(4),imshow(I3);title('腐蚀后图像');
se=strel('rectangle',[25,25]);
I4=imclose(I3,se);%闭操作
figure(5),imshow(I4);title('平滑图像的轮廓');
I5=bwareaopen(I4,2000);%作用是删除二值图像BW中面积小于2000的对象
figure(6),imshow(I5);title('从对象中移除小对象');
[y,x,z]=size(I5);
myI=double(I5);
tic
Blue_y=zeros(y,1);%zeros功能是返回一个m×n×p×...的double类零矩阵
for i=1:y
for j=1:x
if(myI(i,j,1)==1)
Blue_y(i,1)= Blue_y(i,1)+1;%蓝色像素点统计
end
end
end
[temp MaxY]=max(Blue_y);%Y方向车牌区域确定
PY1=MaxY;
while ((Blue_y(PY1,1)>=5)&&(PY1>1))
PY1=PY1-1;
end
PY2=MaxY;
while ((Blue_y(PY2,1)>=5)&&(PY2<y))
PY2=PY2+1;
end
IY=I(PY1:PY2,:,:);
%%%%%% X方向 %%%%%%%%%
Blue_x=zeros(1,x);%进一步确定x方向的车牌区域
for j=1:x
for i=PY1:PY2
if(myI(i,j,1)==1)
Blue_x(1,j)= Blue_x(1,j)+1;
end
end
end
PX1=1;
while ((Blue_x(1,PX1)<3)&&(PX1<x))
PX1=PX1+1;
end
PX2=x;
while ((Blue_x(1,PX2)<3)&&(PX2>PX1))
PX2=PX2-1;
end
PX1=PX1-1;%对车牌区域的校正
PX2=PX2+1;
dw=I(PY1:PY2-8,PX1:PX2,:);
t=toc;
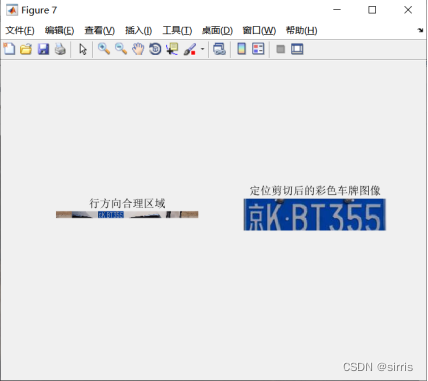
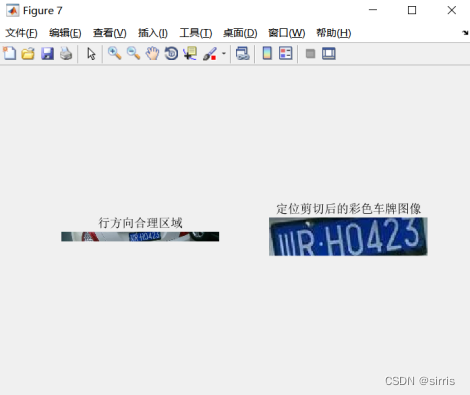
figure(7),subplot(1,2,1),imshow(IY),title('行方向合理区域');
figure(7),subplot(1,2,2),imshow(dw),title('定位剪切后的车牌图像')
imwrite(dw,'result.jpg');
四.运行及结果
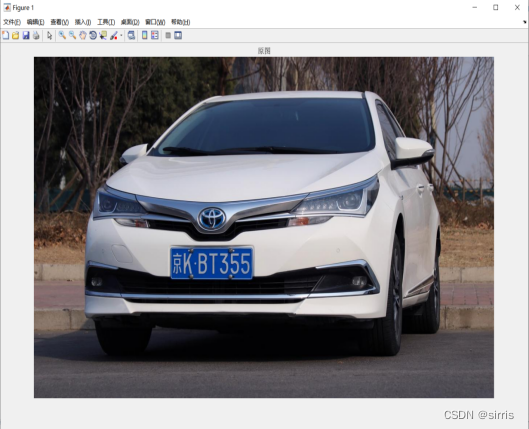
1.从汽车左前方拍摄车牌为京K BT355的图片。
车牌图片原图如下:
车牌位置识别结果如下:
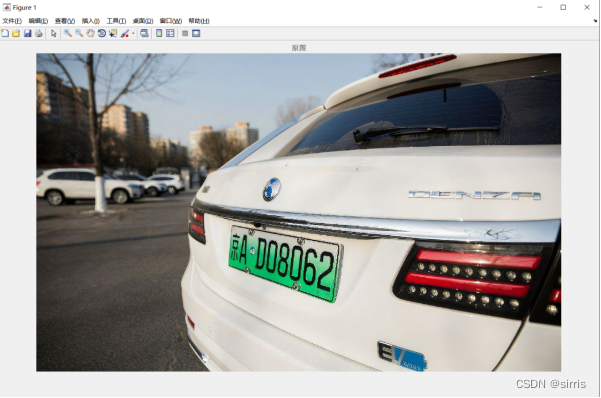
2.从汽车右后方拍摄车牌为京A D08062的图片。
车牌图片原图如下:
车牌位置识别结果如下:

3.从汽车左后方拍摄车牌为川R H0423的图片。
车牌图片原图如下:

车牌位置识别结果如下:
五.结语
上述方法是比较简单的识别定位方法,可以完成车牌定位的任务,但也存在不足,对于车牌较大、拍摄角度较正的图片,识别定位效果较好。对于角度倾斜较大或者车牌较小的图片,可能出现定位不准或者无法识别的情况。

















 650
650

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









