




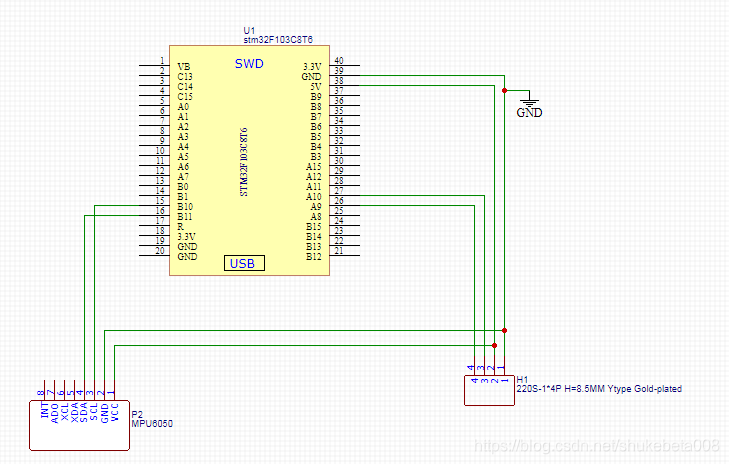
接下来的工作是要使飞机更牢固,并更便于生产,因此前段时间开始琢磨设计PCB,首先先画了一块实验性的最小系统,只包含了主控stm32,姿态传感器mpu6050和一个串口引脚。另外还钻了孔,用来与机架固定。
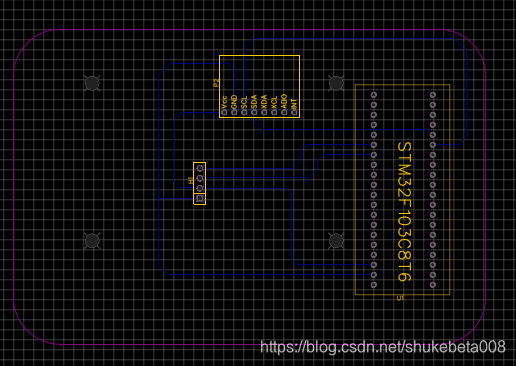
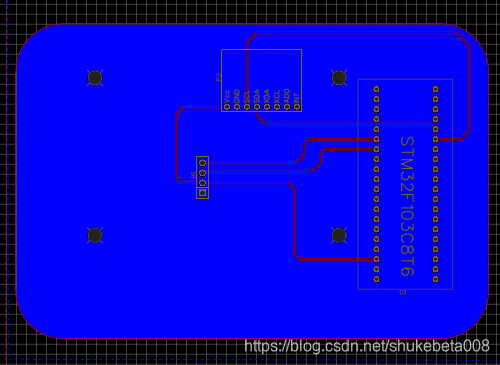
我在立创eda上绘制的原理图,然后自动生成了PCB,自己画了一下排线,并找了钻孔的位置,最后覆铜就搞定了。
我买的stm32和mpu6050都有第三方设计的原理图和PCB文件,如果没有也可以自己新增的,立创有视频教程。
这是焊接了元器件后的正面

这是焊接了元器件后的背面,可以看到背面有线路。

目前我手上没有合适的铜柱,所以暂时只是比划了一下,孔的位置开的基本没问题,间距是620mm和400mm。

这是测试视频:
https://v.youku.com/v_show/id_XNDI5Mjg2Mzk4MA==.html?spm=a2h3j.8428770.3416059.1

















 593
593

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









