




 本文记录了STM32板子通过MICROUSB供电测试,MPU6050与STM32连接的速度验证,遥控器信号及ESC输出的测试过程。所有引脚功能正常,准备进行洞洞板焊接。
本文记录了STM32板子通过MICROUSB供电测试,MPU6050与STM32连接的速度验证,遥控器信号及ESC输出的测试过程。所有引脚功能正常,准备进行洞洞板焊接。
今天做了几件事
1.把原来那个没5v引脚的stm32板子,通过microusb接口连了一根线,并把usb线剪开,确认可以通过这根线内部的红色和黑色来给板子供5v电。

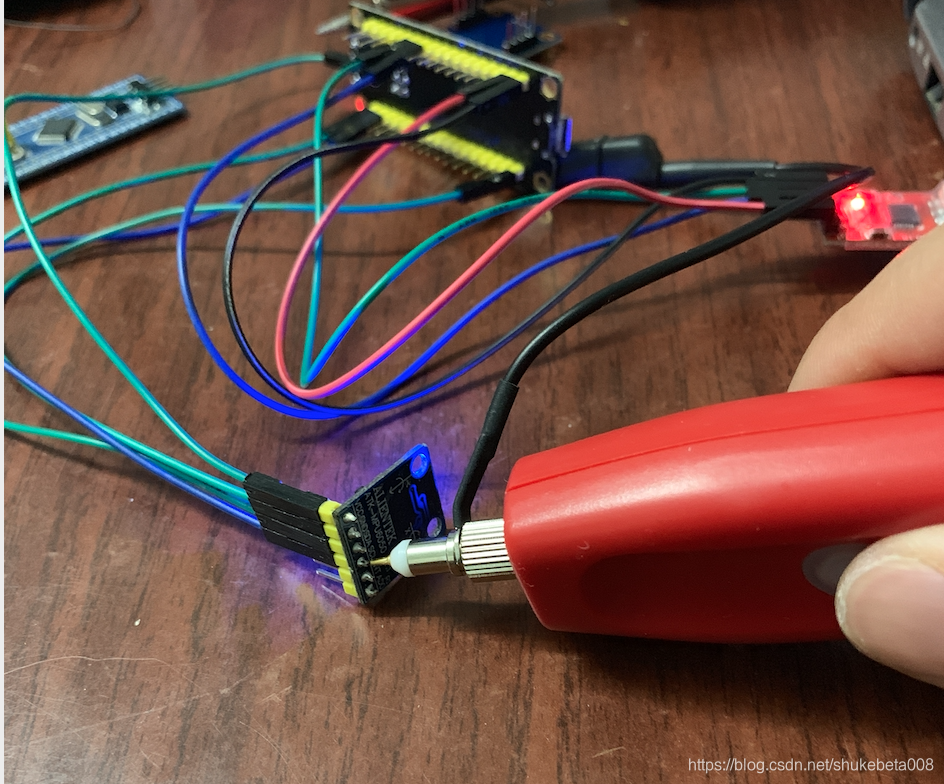
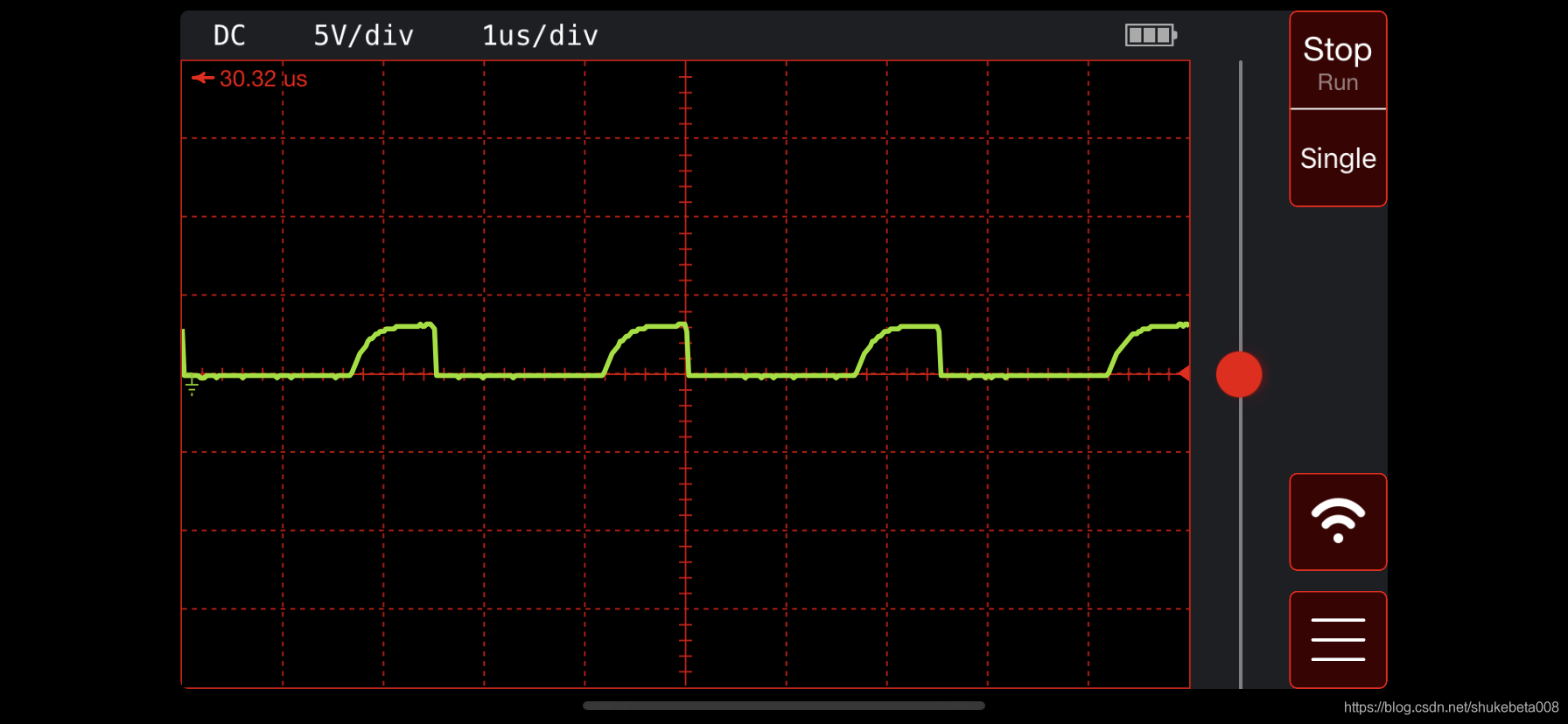
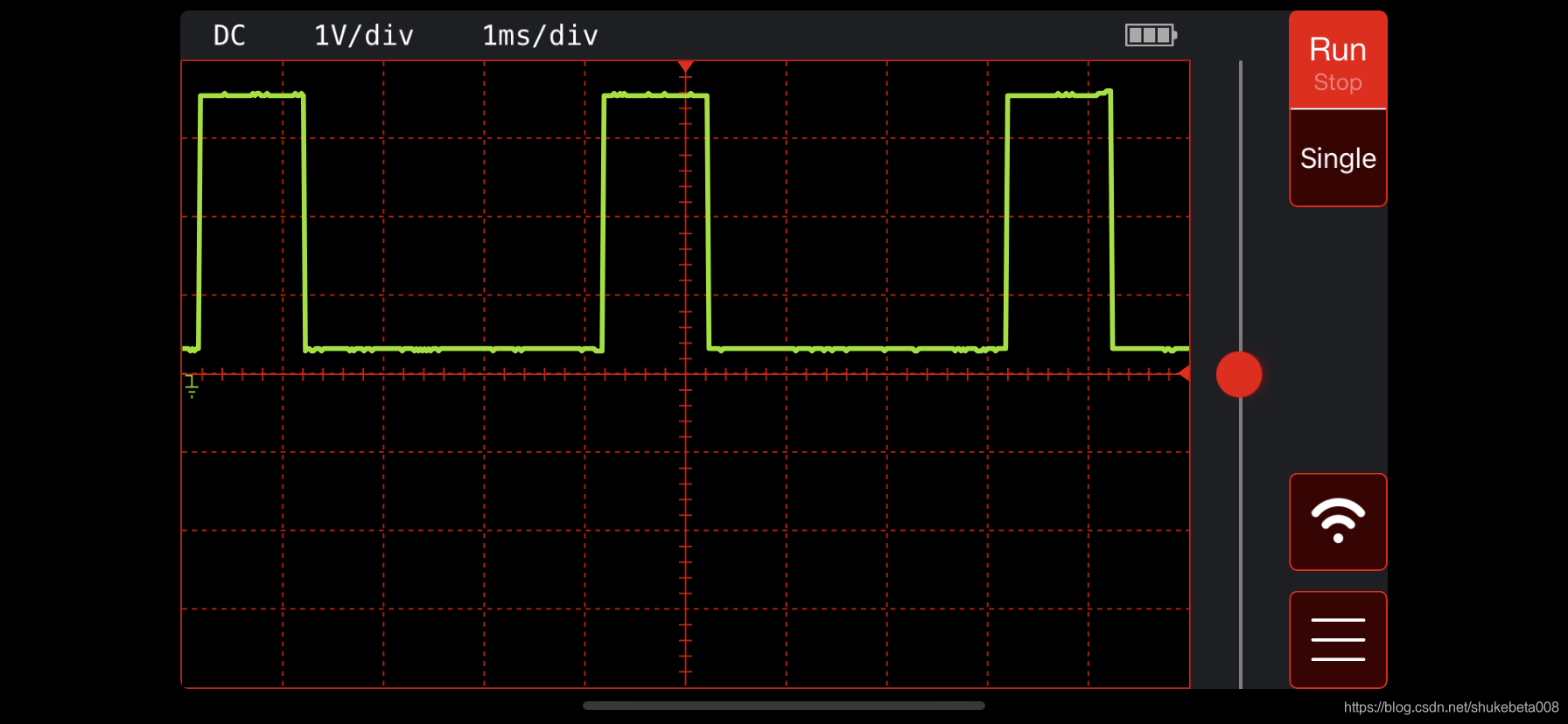
2.先用示波器测试了mpu6050和stm32连接后的scl,算了一下周期确实是2.5us即400kHz,那么这样直接连接速度没问题。
下图是示波器连线图
下图是波形
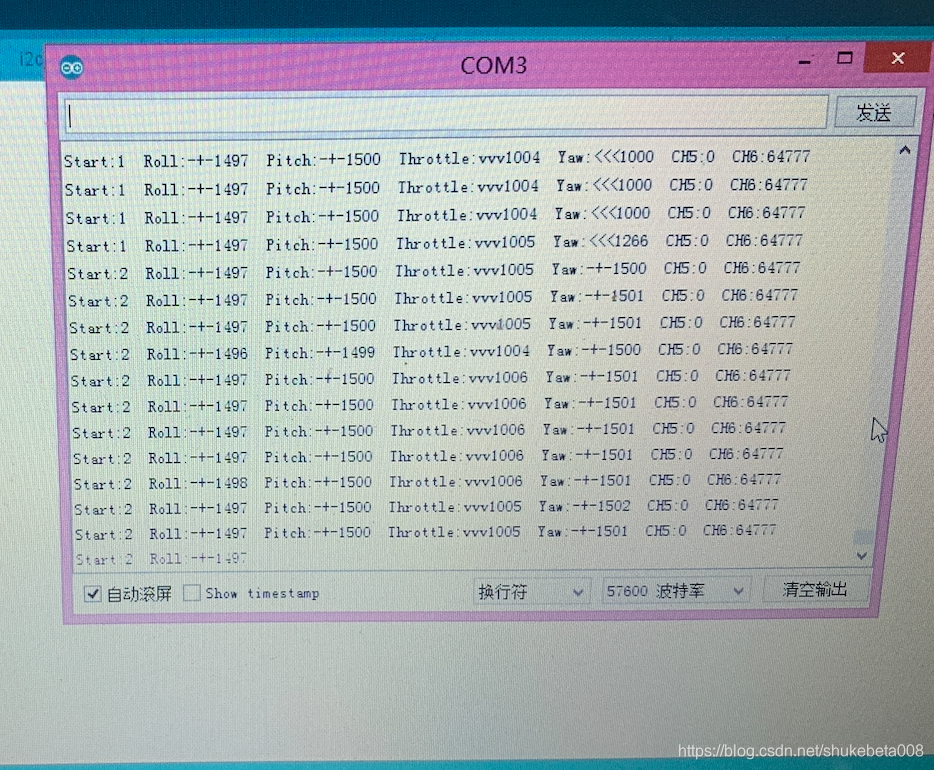
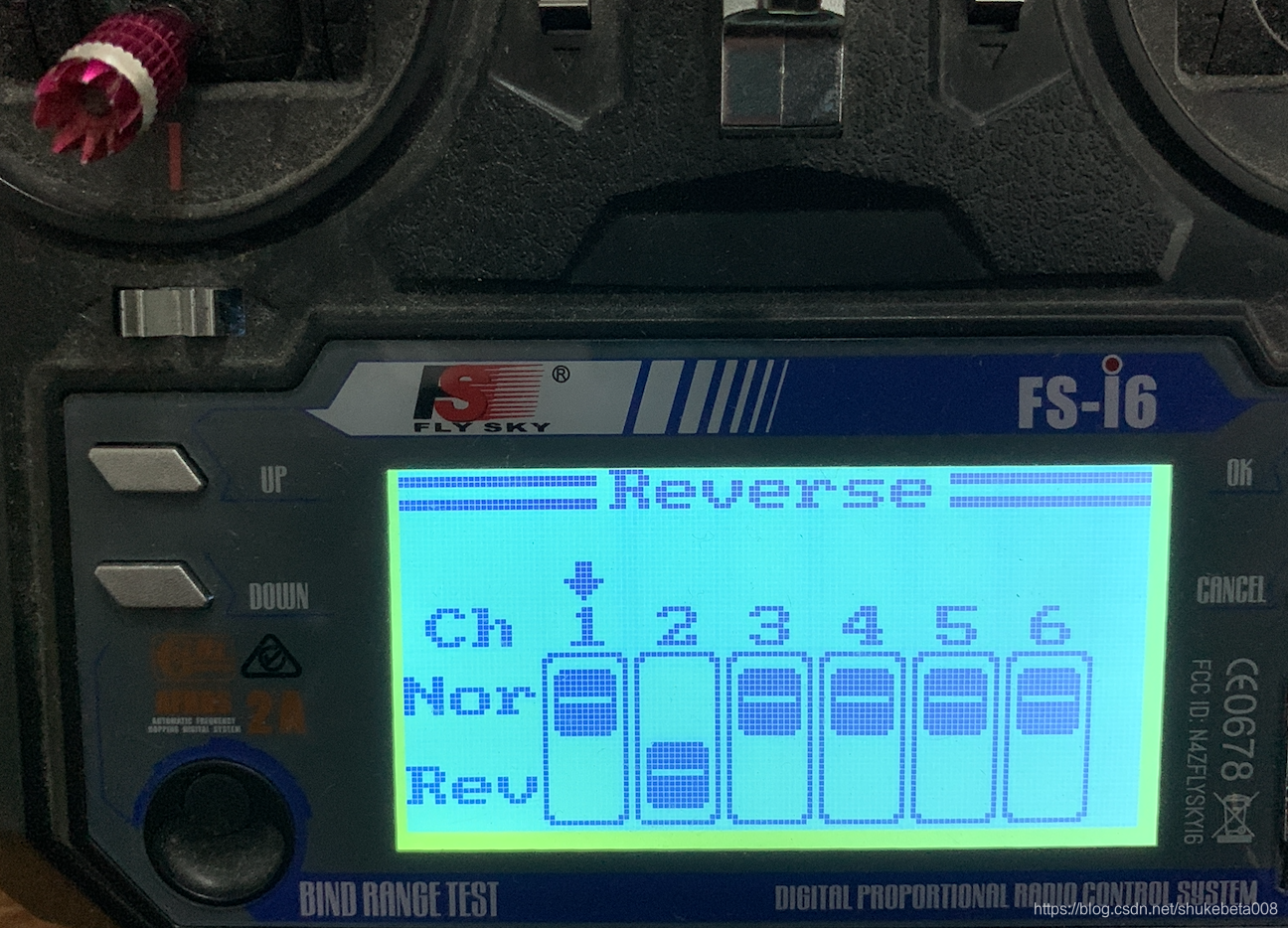
3.测试了遥控器信号(输入a),发现1234通道基本没问题(只是pitch通道做了反向),56通道有点问题,但是ymfc-32没用到。
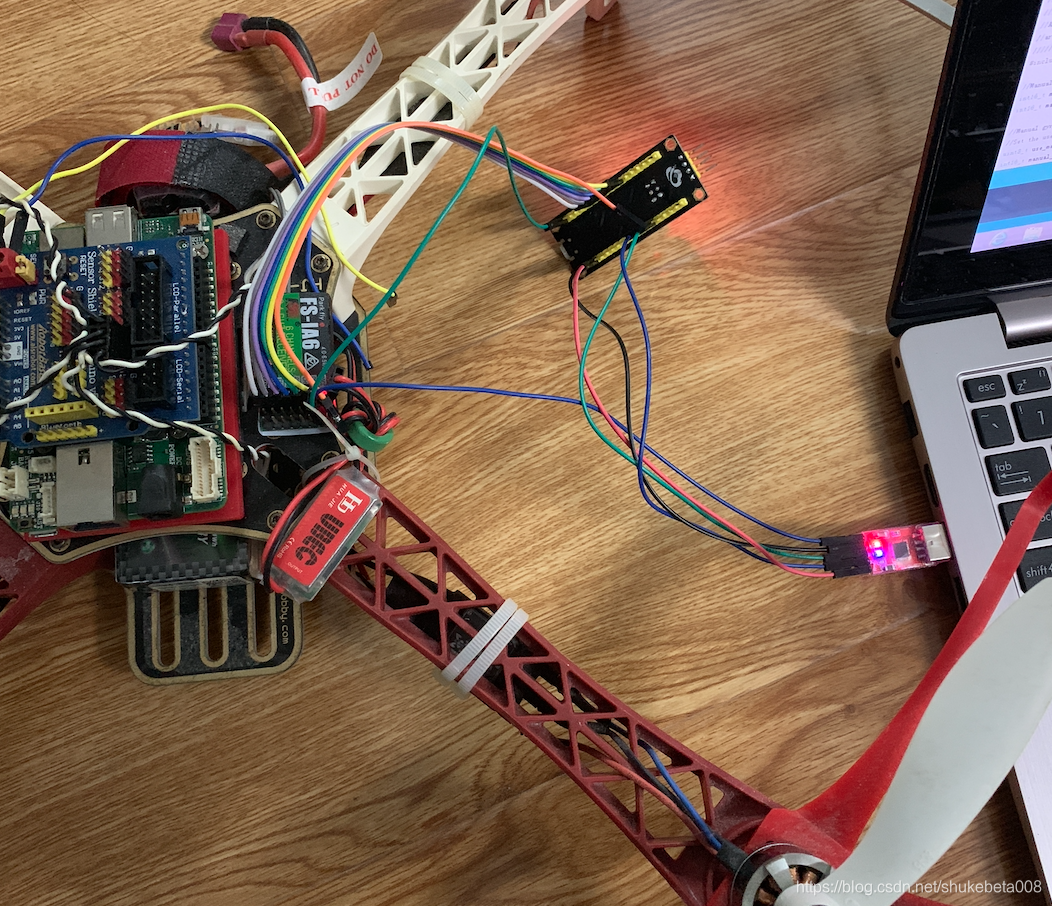
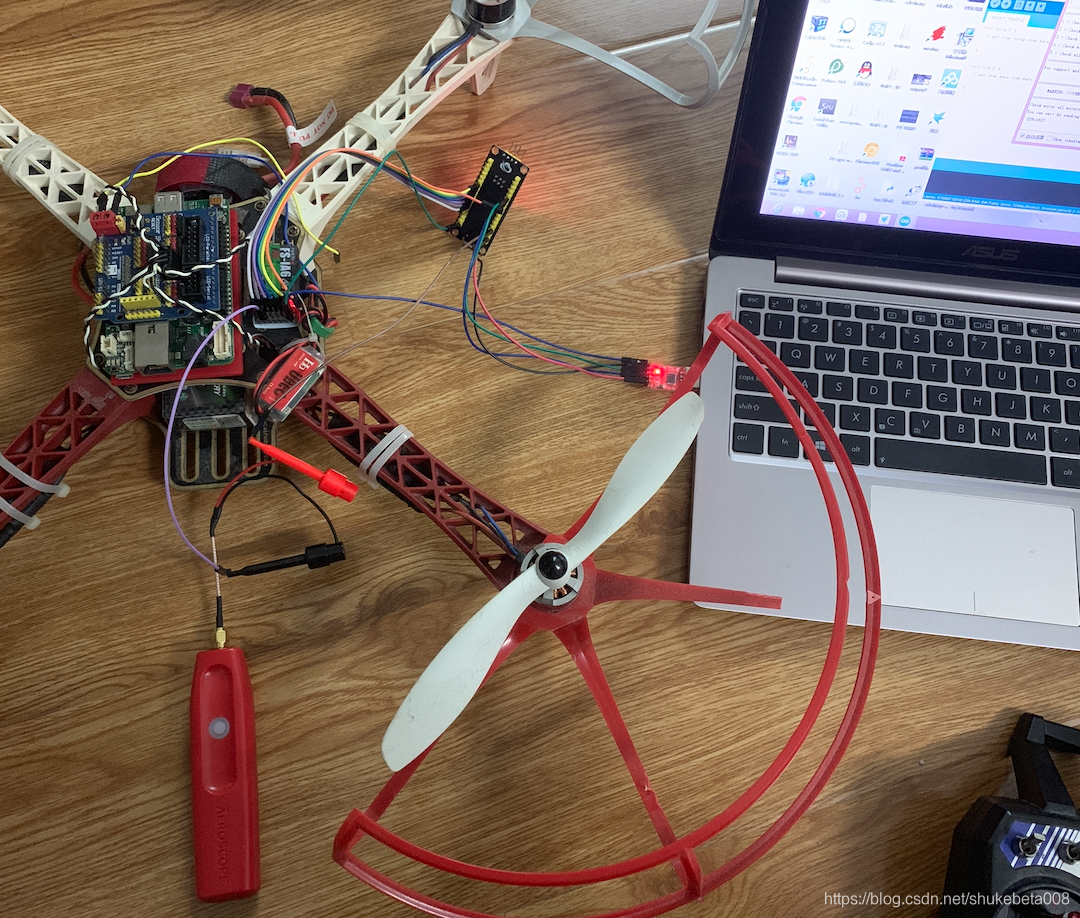
这是遥控接收机的连线情况(这个测试不用示波器)
这是2通道(pitch)反向的设置方式
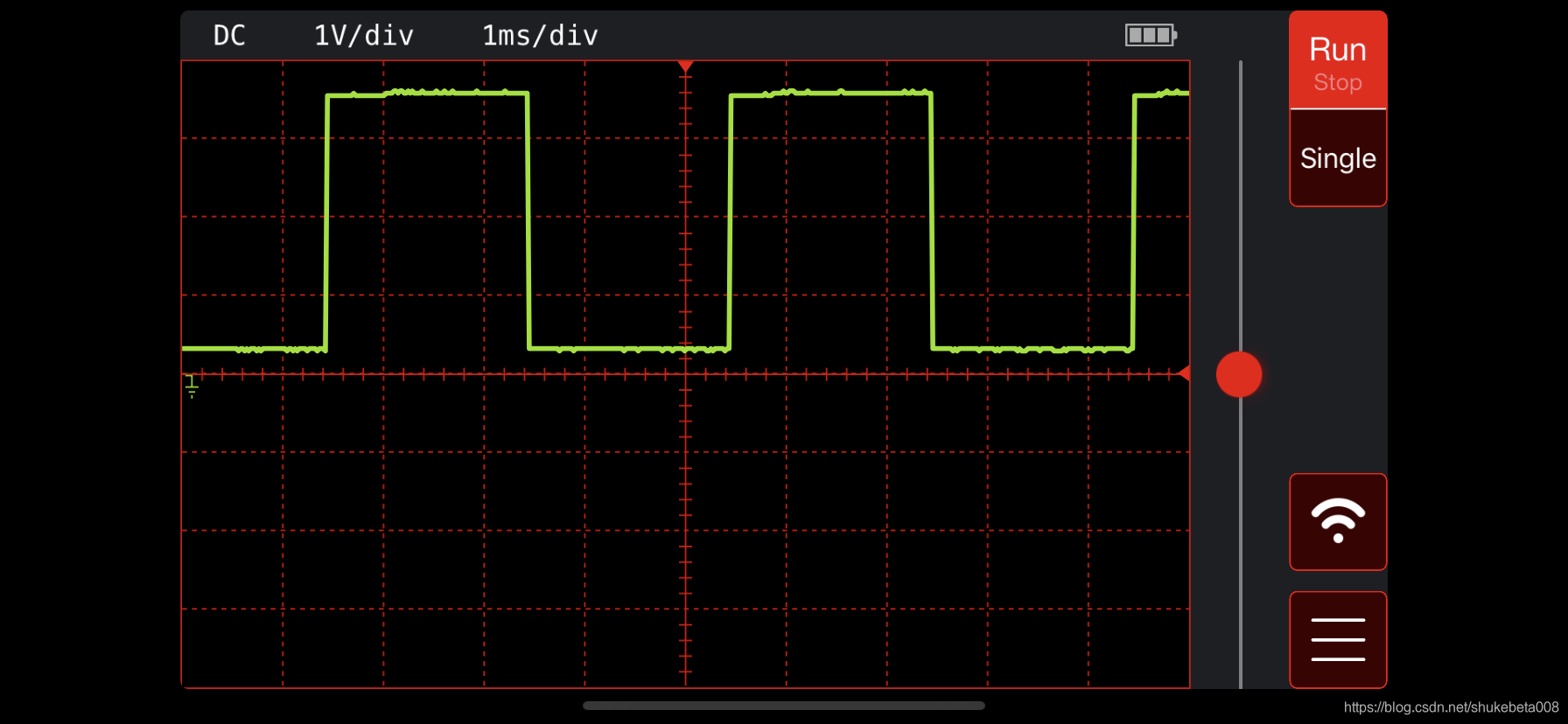
4.测试了esc输出,我使用的方法是输入5,然后对每个esc的输出口都用示波器看了波形,确认了它们会根据遥控油门大小来改变宽度。
这是连线方法,除了遥控器要接,示波器也要接,这时接在其中一个esc输出口上,实际4个口都要分别测试。
遥控器的油门是左边上下(一开始必须拉到最低才能进入,否则程序会报错,这是安全措施)

然后就在示波器上观察,脉冲宽度是否会变宽和变窄。
经过今天的测试,所有的引脚功能都没问题,说明之前的焊接都ok,并且板子也跟原作的程序是兼容的,接下来就可以焊接到洞洞板上了,只要后面的焊接没问题那么飞机就肯定飞得起来,因为setup程序和飞控程序在硬件交互上没有区别,只是mcu内部计算上不一样。
另外还有读取电池电压和led测试没做,这两个会在所有元器件都焊接到洞洞板上以后才做,实际这两个不太重要,led只是给人检查状态的,电压读取也只是为了修正电池电量不足,然后做油门补偿用的,实际不补偿也没事,也就是说这两部分电路不重要的,测不测试都行。

















 1387
1387

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









