




接下来打算发布一款在Arduino环境下基于STM32的带GPS悬停功能的飞机制作过程。
不定期更新制作步骤,可能不会太成体系,只是当作一个记录。
首先我们要实现YMFC-32,也就是用stm32但是还不带gps的飞机,做完能飞后再做YMFC-32 auto
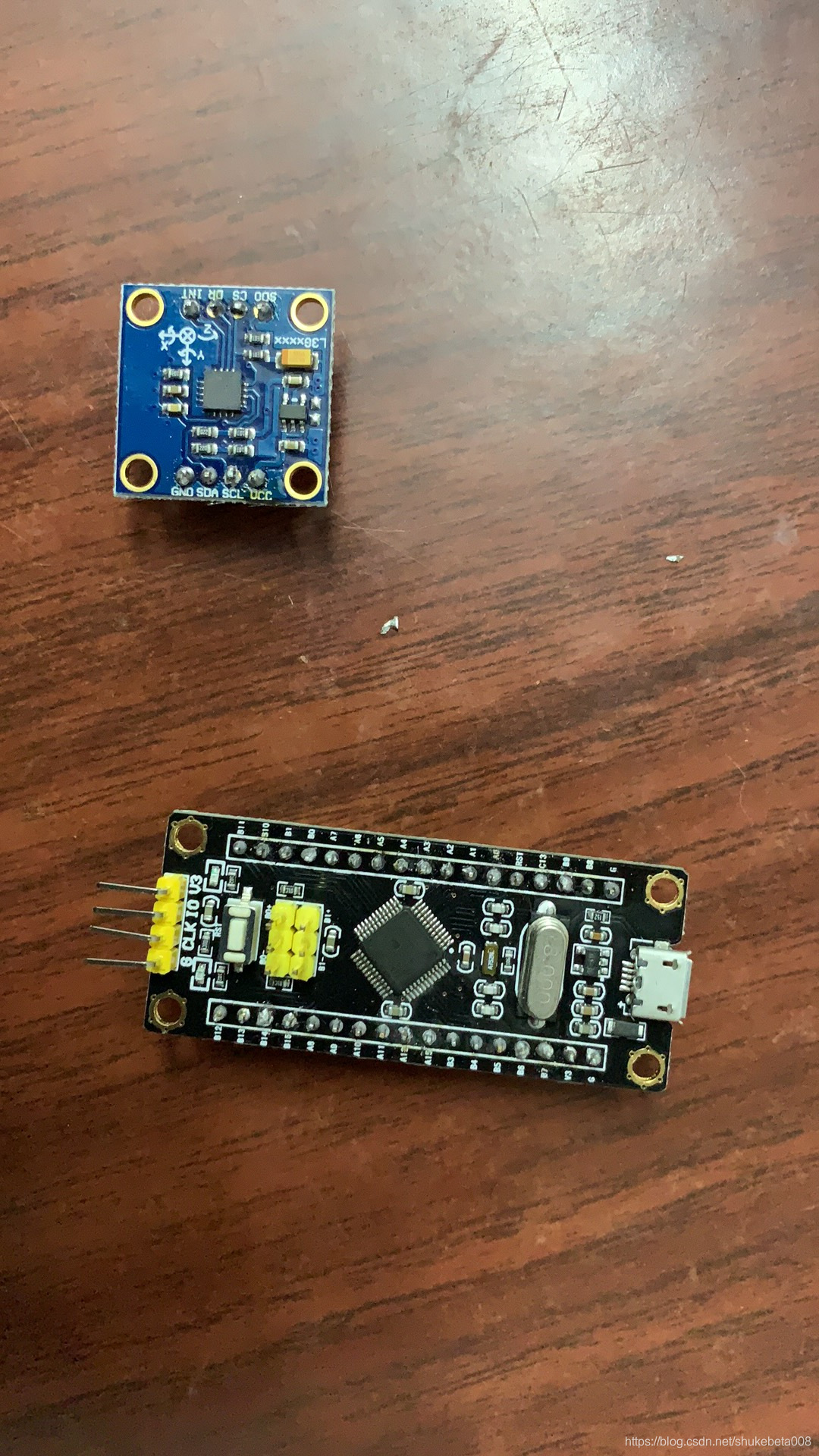
采购完所有零件后首先焊接最核心的两块板子。
 本项目计划在Arduino环境下,使用STM32开发一款具备GPS悬停功能的飞机。将逐步分享从YMFC-32基本版到自动版的制作过程,包括核心板焊接等关键步骤。
本项目计划在Arduino环境下,使用STM32开发一款具备GPS悬停功能的飞机。将逐步分享从YMFC-32基本版到自动版的制作过程,包括核心板焊接等关键步骤。
接下来打算发布一款在Arduino环境下基于STM32的带GPS悬停功能的飞机制作过程。
不定期更新制作步骤,可能不会太成体系,只是当作一个记录。
首先我们要实现YMFC-32,也就是用stm32但是还不带gps的飞机,做完能飞后再做YMFC-32 auto
采购完所有零件后首先焊接最核心的两块板子。
 9610
9610






















 到【灌水乐园】发言
到【灌水乐园】发言






