






本系统(程序+源码+数据库+调试部署+开发环境)带论文文档1万字以上,文末可获取,系统界面在最后面。
系统程序文件列表
开题报告内容
一、选题背景
关于高校社团管理系统的研究,现有研究主要以社团管理的部分功能实现为主,如社团成员管理或活动管理等。专门针对包含学生、社团信息、加入社团、社团类别、活动信息、活动类型、活动报名、社长、社团资讯等多方面功能的综合高校社团管理系统的研究较少。因此本选题将以高校社团管理为研究情景,重点分析和构建这样一个全面的社团管理系统所涉及的各种问题,以期探寻高效管理高校社团、提升学生社团体验的问题原因及机制等,提出对策建议,为后续更加深入的研究提供基础。在国内外研究中,国外一些高校社团管理信息化程度较高,有较为成熟的管理系统,但由于教育体制和社团文化的差异,不能直接适用于国内。国内研究多处于起步和发展阶段,在功能的完整性和用户体验方面存在不足,目前存在的争论焦点在于如何在满足多样化功能需求的同时保证系统的易用性和可扩展性。本研究认为应从高校社团的实际需求出发,综合考虑各方面因素来构建系统1。
二、研究意义
本选题针对高校社团管理等问题的研究具有重要的理论意义和现实意义。
- 理论意义:本选题研究将对高校社团管理相关理论基础进行深入剖析,有助于完善高校社团管理在软件工程方面的理论体系。
- 现实意义:通过构建一个功能全面的高校社团管理系统,可以提高社团管理的效率,方便学生参与社团活动,促进社团的良好发展,解决目前社团管理中存在的功能单一、效率低下等实际问题。
三、研究方法
本研究拟采用多种研究方法相结合的方式。
- 文献分析法:查阅国内外相关的高校社团管理系统的文献资料,了解其研究现状、发展历程以及存在的问题,为本系统的设计提供理论依据和参考。
- 软件工程方法:按照软件工程的规范流程,从需求分析、设计、编码、测试到维护等阶段,对高校社团管理系统进行开发,确保系统的质量和可维护性。
- 问卷调查法:针对高校社团成员、社长等相关人员设计问卷,收集他们对社团管理系统功能需求的意见和建议,如对社团信息管理、活动报名流程等方面的期望,使系统更符合用户需求。
四、研究内容
- 需求分析
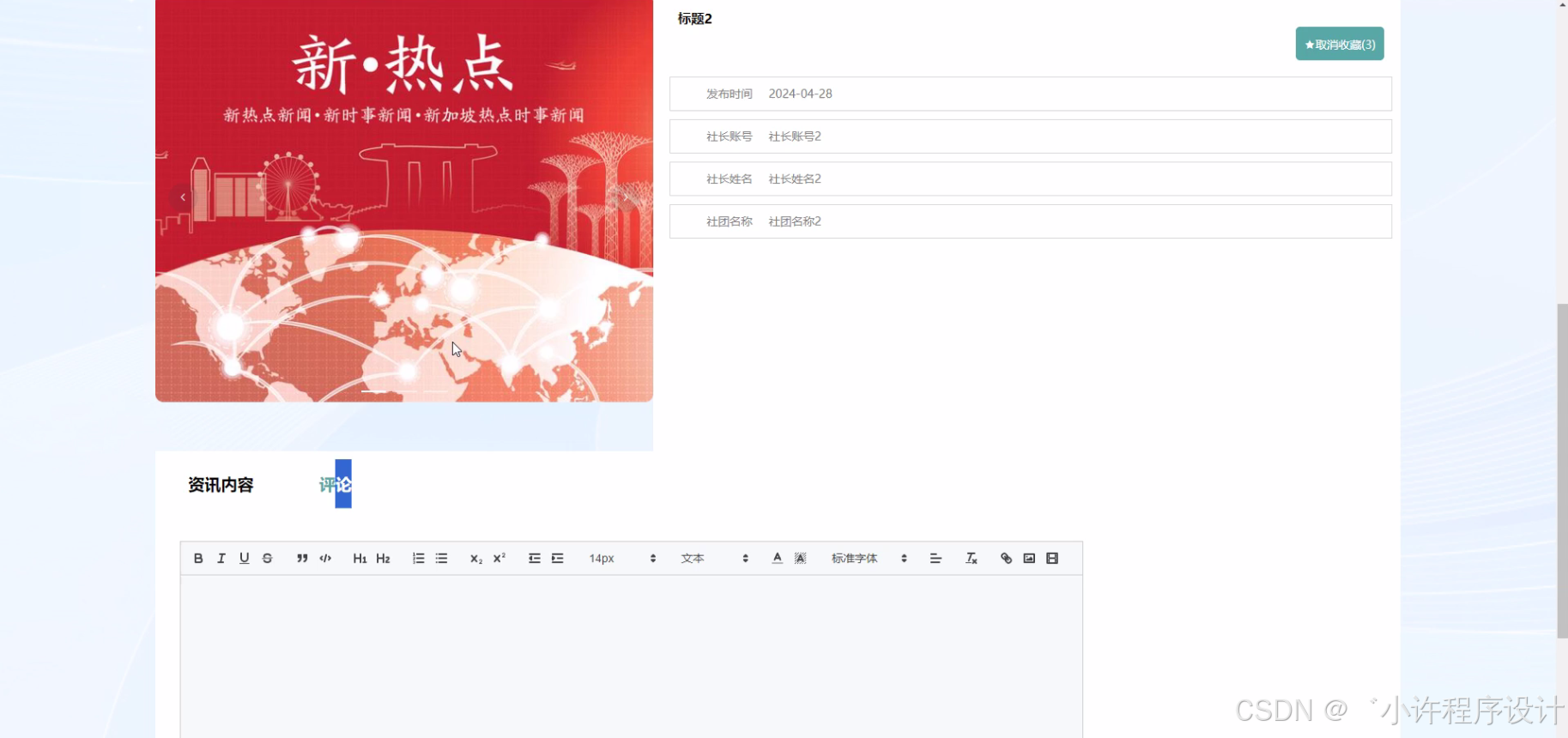
- 对学生的需求分析:包括学生查看社团信息、加入社团、报名活动等需求,要确保系统操作简单便捷,能及时推送社团相关资讯。
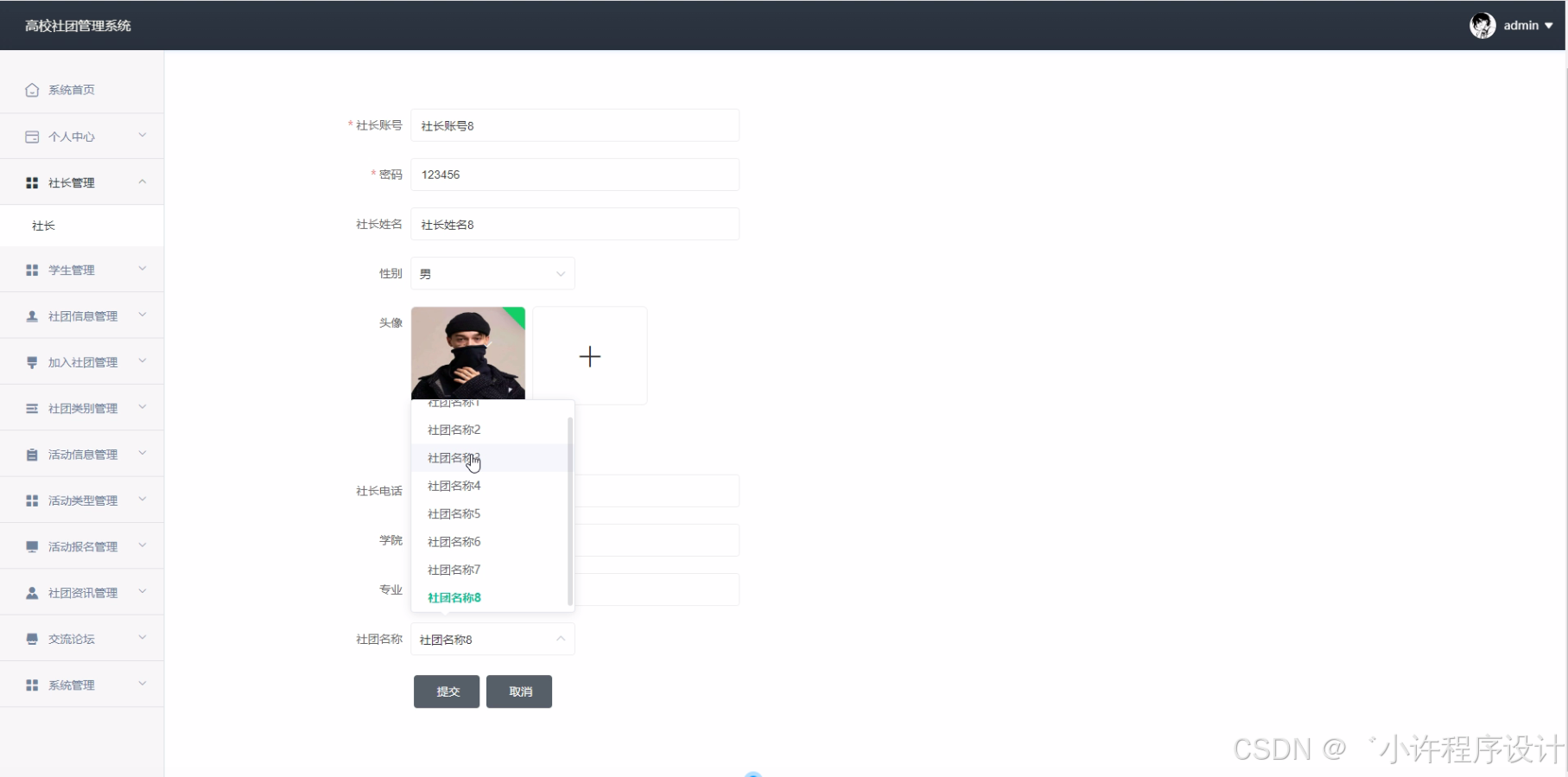
- 对社长的需求分析:如社长管理社团成员、发布社团资讯、组织活动等功能需求,系统要提供有效的权限管理功能。
- 对社团类别的需求分析:明确不同社团类别的划分标准和管理方式,以便在系统中进行分类展示和管理。
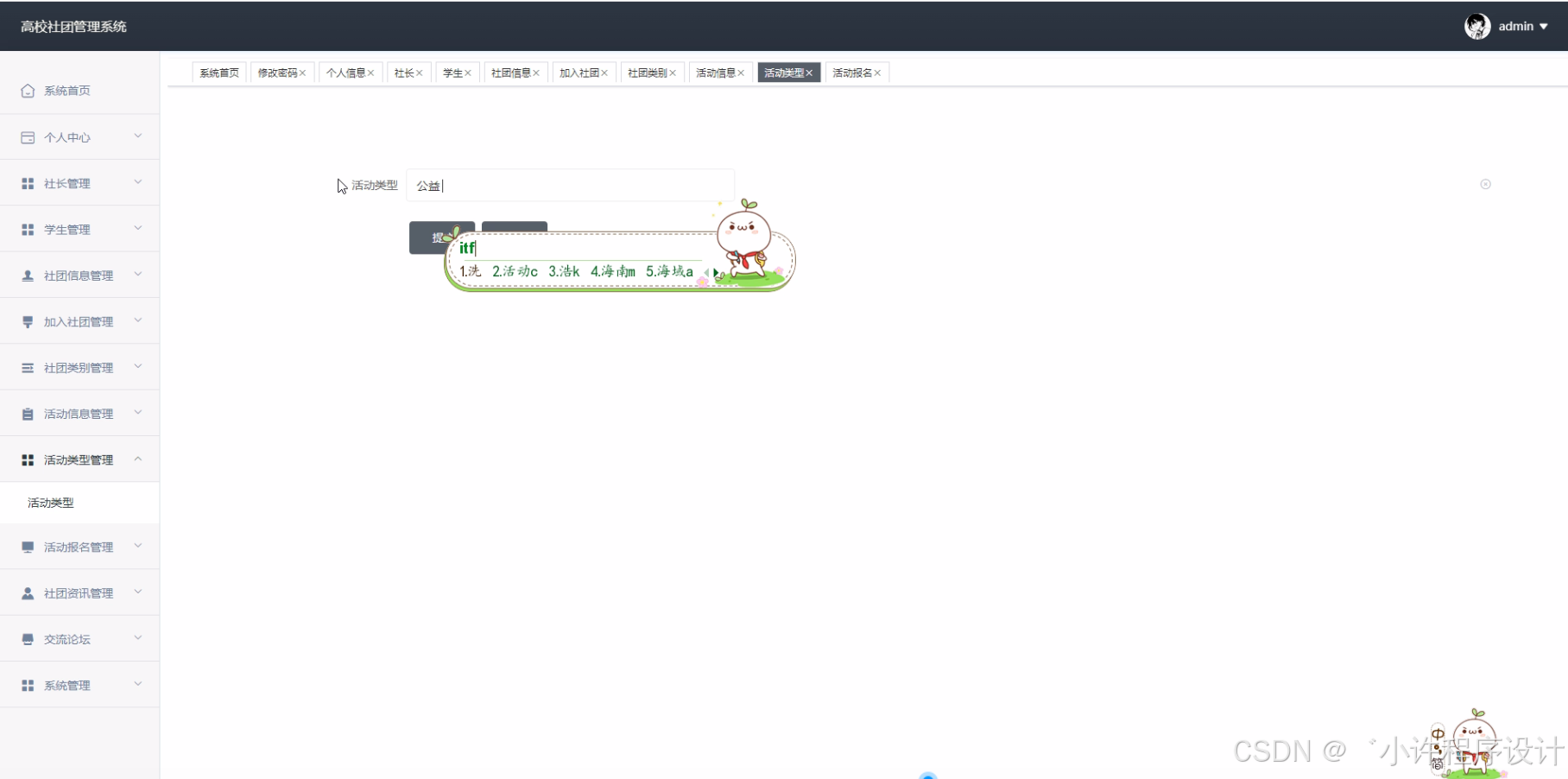
- 对活动信息和类型的需求分析:确保活动信息准确全面,活动类型分类合理,方便学生筛选和报名。
- 系统设计
- 架构设计:根据需求分析结果,设计系统的整体架构,包括前端界面和后端数据库等部分的结构。
- 功能模块设计:将系统划分为学生管理模块、社团管理模块、活动管理模块等,明确各个模块的功能和交互关系。
- 数据库设计:设计数据库表结构,存储社团信息、学生信息、活动信息等数据,确保数据的完整性和一致性。
- 系统实现与测试
- 按照设计方案进行系统的编码实现,运用Python和Flask框架进行开发。
- 进行功能测试,确保系统各个功能正常运行,如学生加入社团、活动报名等功能的准确性。
- 进行性能测试,保证系统在多用户并发访问时的稳定性和响应速度。
五、拟解决的主要问题
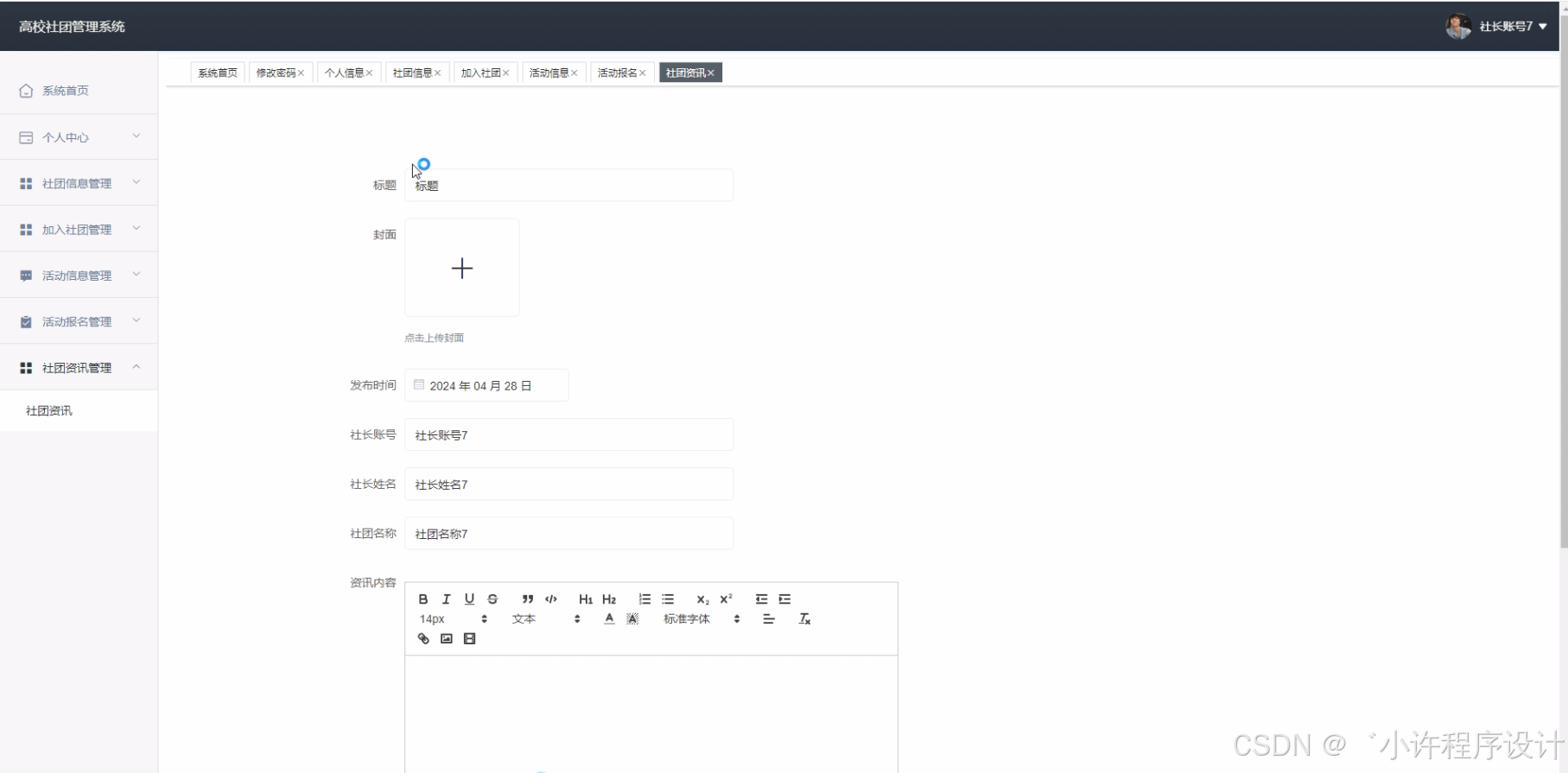
- 功能完整性:构建一个包含学生、社团信息、加入社团、社团类别、活动信息、活动类型、活动报名、社长、社团资讯等多方面功能的综合高校社团管理系统,解决目前高校社团管理系统功能单一的问题。
- 易用性:通过优化系统的界面设计和操作流程,使学生和社长能够方便快捷地使用系统,提高用户体验。
- 数据管理:设计合理的数据库结构,有效管理社团相关的数据,如社团成员信息、活动信息等,确保数据的准确性和安全性。
六、研究方案
- 可能遇到的困难和问题
- 技术难题:在系统开发过程中,可能会遇到一些技术上的挑战,例如如何实现高效的数据库查询以满足大量社团数据和活动数据的管理需求,以及如何保证系统的安全性,防止数据泄露等。
- 需求变更:在研究过程中,随着对高校社团管理需求的进一步深入了解,可能会出现需求变更的情况,这会影响系统的设计和开发进度。
- 解决的初步设想
- 针对技术难题:加强技术学习,查阅相关技术资料,参考已有的类似系统的解决方案。对于数据库查询效率问题,可以采用优化数据库索引等技术手段;对于系统安全问题,采用加密技术对敏感数据进行加密处理。
- 针对需求变更:建立有效的需求变更管理机制,与相关用户(学生、社长等)保持密切沟通,及时评估需求变更对系统的影响,调整研究计划和系统设计方案。
七、预期成果
- 系统成果:成功开发出一个功能完善、易用性强的高校社团管理系统,能够满足学生、社长等不同用户在社团管理和参与方面的需求。
- 文档成果:撰写详细的毕业设计论文,包括系统的需求分析、设计、实现和测试过程,以及相关的研究成果和结论,为其他类似系统的开发提供参考。
进度安排:
2023年12月: 查看相关资料、技术,准备技术文档,做好需求分析;下发任务书;
2024年01月: 撰写开题报告,并制定软件开发计划,初步设计软件功能架构;
2024年02月: 根据需求分析,进行详细设计;初步设计软件部分功能,完成开题报告;
2024年03月: 对软件前,后台系统功能进行开发,完成软件各个功能模块,撰写论文初稿;
2024年04月:进行系统测试、论文初稿完成、和指导教师沟通,上交初稿,查重,中期检查;
2024年05月:修改论文,完成定稿,软件功能全部实现、测试、界面美化,上交论文资料,参加答辩。
参考文献:
[1] Hamed Tahmooresi, A. Heydarnoori et al. "An Analysis of Python's Topics, Trends, and Technologies Through Mining Stack Overflow Discussions." arXiv.org (2020).
[2] 韩文煜. "基于python数据分析技术的数据整理与分析研究"[J]. 科技创新与应用, 2020, No.296(04): 157-158.
[3] Sebastian Bassi. "A Primer on Python for Life Science Researchers." PLoS Comput. Biol. (2007).
[4] Roseline Bilina and S. Lawford. "Python for Unified Research in Econometrics and Statistics." (2009). 558 591.
[5] 程俊英. "基于Python语言的数据分析处理研究"[J]. 电子技术与软件工程, 2022, No.233(15): 236-239.
[6] 曾浩. "基于Python的Web开发框架研究"[J]. 广西轻工业, 2011, 27(08): 124-125+176.
[7] Fabian Pedregosa, G. Varoquaux et al. "Scikit-learn: Machine Learning in Python." Journal of machine learning research(2011).
[8] 陈佳佳, 邱晓荣, 熊宇昊, 段莉华. "基于Python的人脸识别技术研究"[J]. 电脑知识与技术, 2023, 19 (08): 34-36+39.
[9] 阿不都艾尼·阿不都肉素力. "Python的计算机软件应用技术分析"[J]. 电脑编程技巧与维护, 2021, No.435(09): 29-30+58.
[10] 张楠. "Python语言及其应用领域研究"[J]. 科技创新导报, 2019, 16(17): 122-123.
[11] 王雄伟, 侯海珍. "大数据专业Python程序设计课程建设探究"[J]. 知识窗(教师版), 2023, (10): 117-119.
[12] 朱向阳. "高中信息技术python项目式教学路径分析"[J]. 高考, 2023, (24): 126-128.
以上是开题是根据本选题撰写,是项目程序开发之前开题报告内容,后期程序可能存在大改动。最终成品以下面运行环境+技术栈+界面为准,可以酌情参考使用开题的内容。要源码请在文末进行获取!!
系统技术栈:
前端:Vue.js、HTML、CSS、JavaScript后端技术栈
后端:Python 3.7.7、Django 、MySQL5.7
开发工具:PyCharm社区版、Navicat 11以上版本
系统开发流程:
• 使用HTML、CSS和JavaScript结合Vue.js构建前端界面。
• 使用Python语言结合Django框架开发RESTful API。
• 利用MySQL数据库进行数据存储和查询。
• 通过PyCharm IDE进行代码编写、调试和项目管理。
毕设使用者指南
系统概览
本系统是一个基于现代Web技术构建的应用程序,旨在为用户提供一个交互性强、响应快速的用户体验。系统前端采用Vue.js框架,后端使用Python语言结合Django框架,并以MySQL作为数据存储解决方案。
前端使用指南
1.界面导航
- 主页:展示系统的主要功能和概览信息。
- 功能页面:根据需要,用户可以访问不同的功能页面,如用户管理、数据分析等。
2. 交互操作
- 使用HTML和CSS构建的界面元素,如按钮、链接、表单等,用户可以点击或输入信息进行操作。
- 利用JavaScript和Vue.js实现的动态功能,如实时数据更新、表单验证等,增强用户交互体验。
后端服务指南
1. API使用
- 系统后端提供RESTful API,用户可以通过HTTP请求与系统进行数据交互。
- 常见的API操作包括GET(获取数据)、POST(提交数据)、PUT(更新数据)和DELETE(删除数据)。
2. 数据管理
- 利用MySQL数据库,系统能够安全、高效地存储和管理用户数据。
- 用户可以通过系统界面或API访问数据库中的数据。
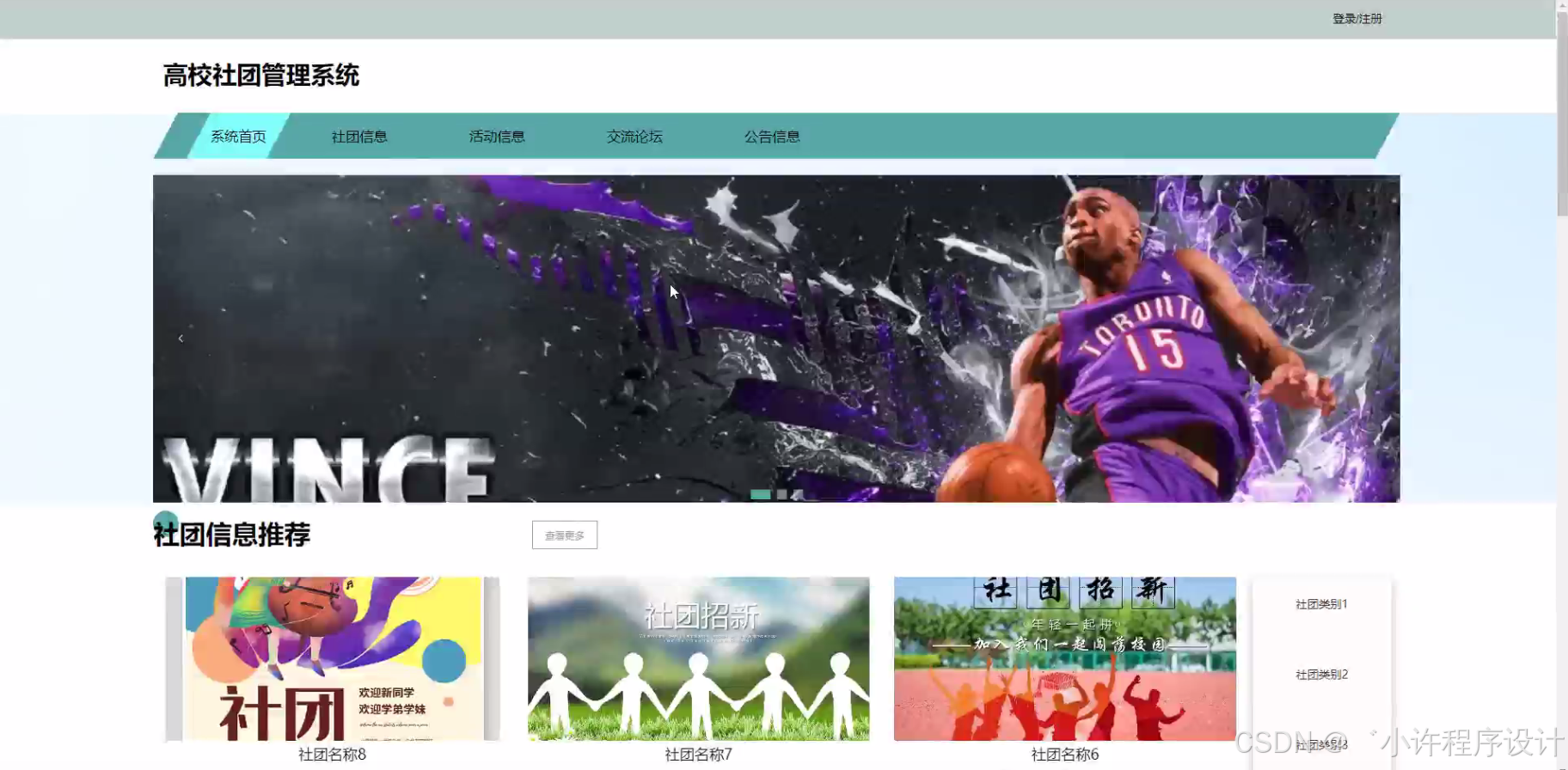
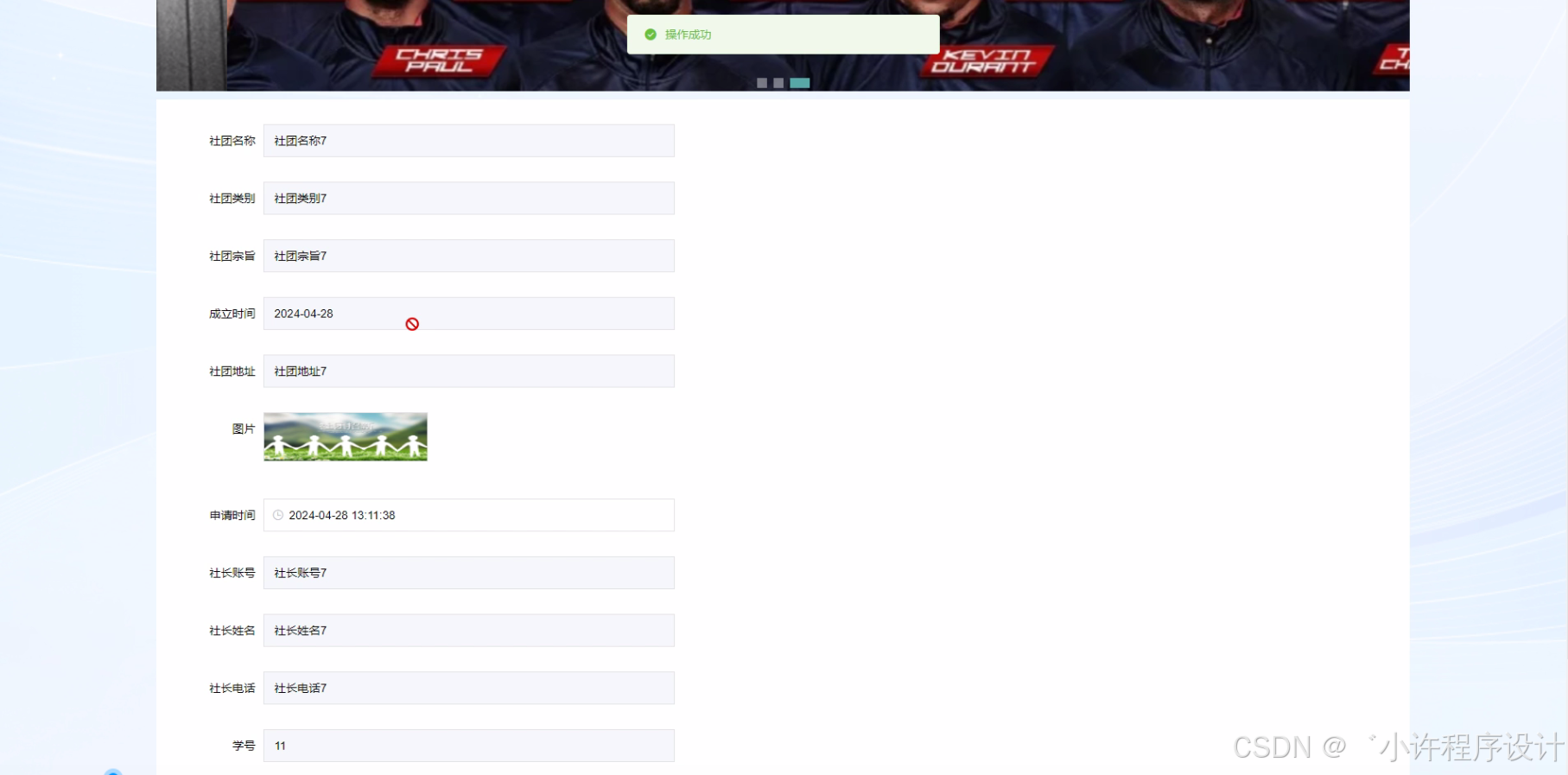
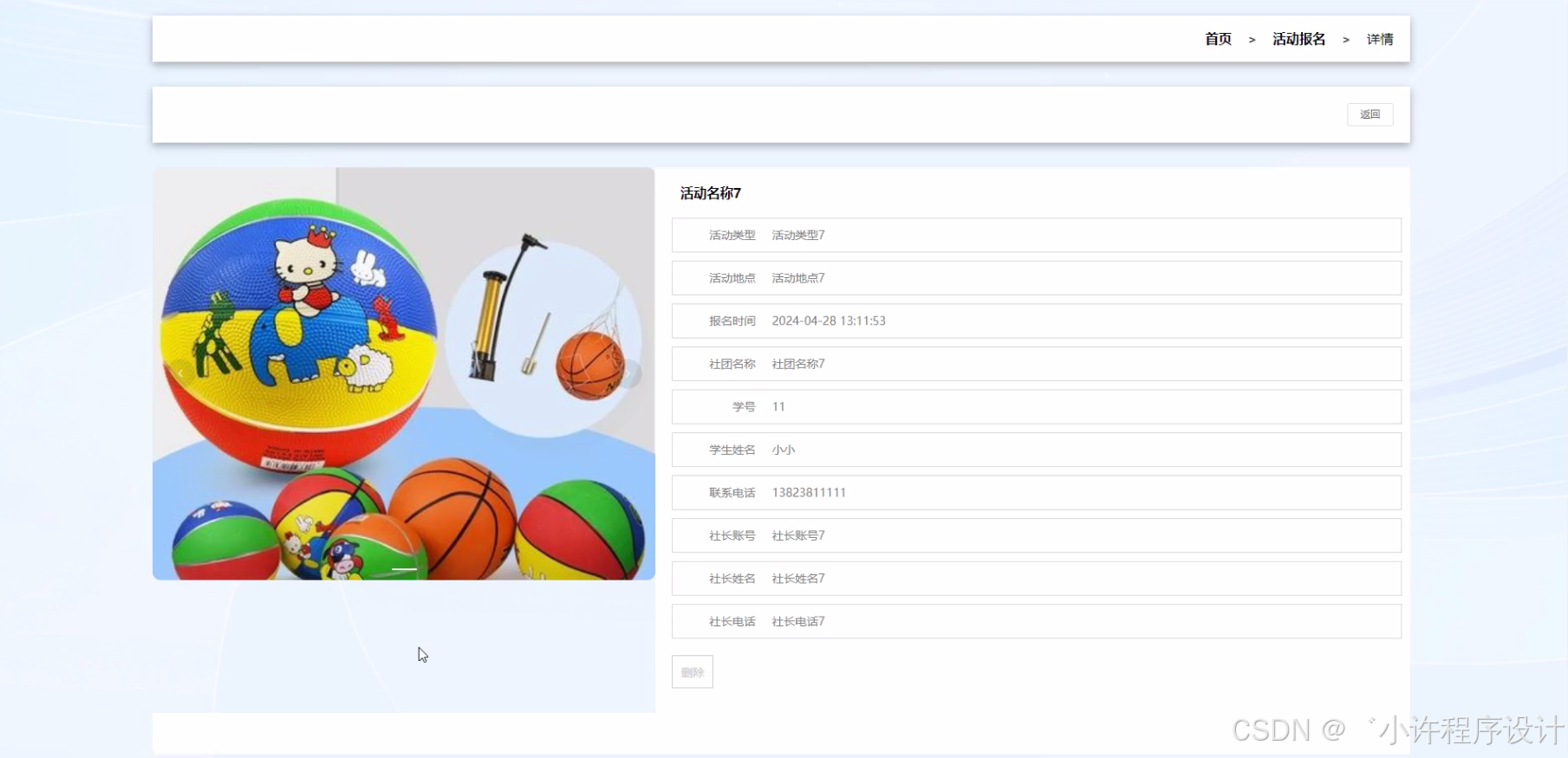
程序界面:





















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









