



 文章介绍了图像处理中的几种颜色空间,如RGB、CMYK、HSV和CIE-XYZ,以及如何通过直方图均衡化提升图像对比度,特别是详细讨论了CLAHE算法。此外,还提到了腐蚀与膨胀用于消除噪点和改变目标特征,以及滤波和卷积的基础知识,包括均值、中值和高斯滤波,以及Prewitt和Sobel梯度滤波器在边缘检测中的应用。
文章介绍了图像处理中的几种颜色空间,如RGB、CMYK、HSV和CIE-XYZ,以及如何通过直方图均衡化提升图像对比度,特别是详细讨论了CLAHE算法。此外,还提到了腐蚀与膨胀用于消除噪点和改变目标特征,以及滤波和卷积的基础知识,包括均值、中值和高斯滤波,以及Prewitt和Sobel梯度滤波器在边缘检测中的应用。
图像的颜色空间
1.RGB颜色空间(主流应用)
像素值表示为(b,g,r),取值范围:暗[0,255]亮/[0.0,1.0],做加法混色处理,越混越亮
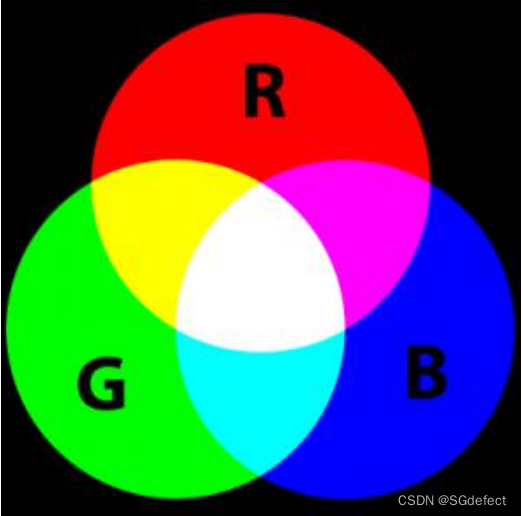
RGB三通道彩色图转换到单通道灰度图公式
Gray=R*0.3+G*0.59+B*0.11

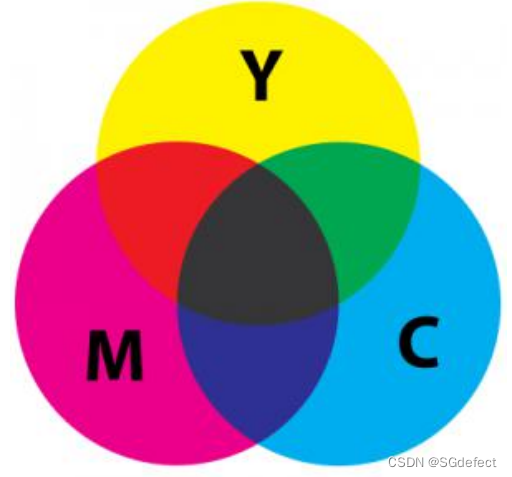
2.CMY(K)颜色空间
像素值表示为(c,m,y,k),蓝绿、品红、黄三种颜色做减法混色,越混越暗,一般用于印刷。
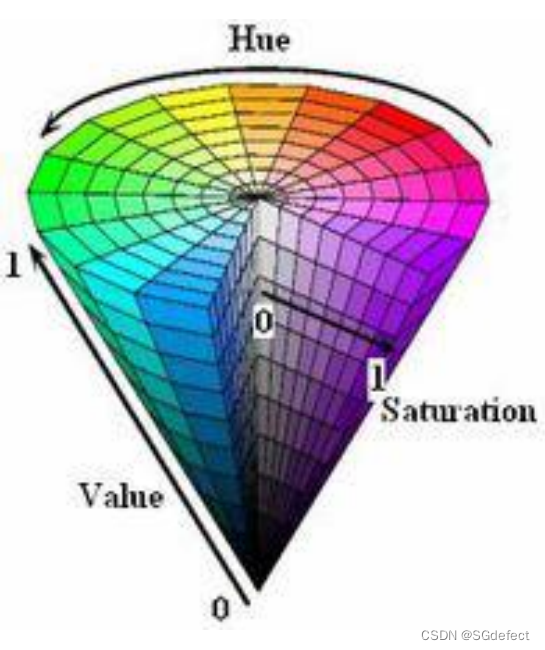
3.HSV颜色空间
像素值表示为(h,s,v),色调(颜色种类)、饱和度(颜色纯度)、明度(颜色明亮度)呈圆锥体表示,主要用于绘画配色:
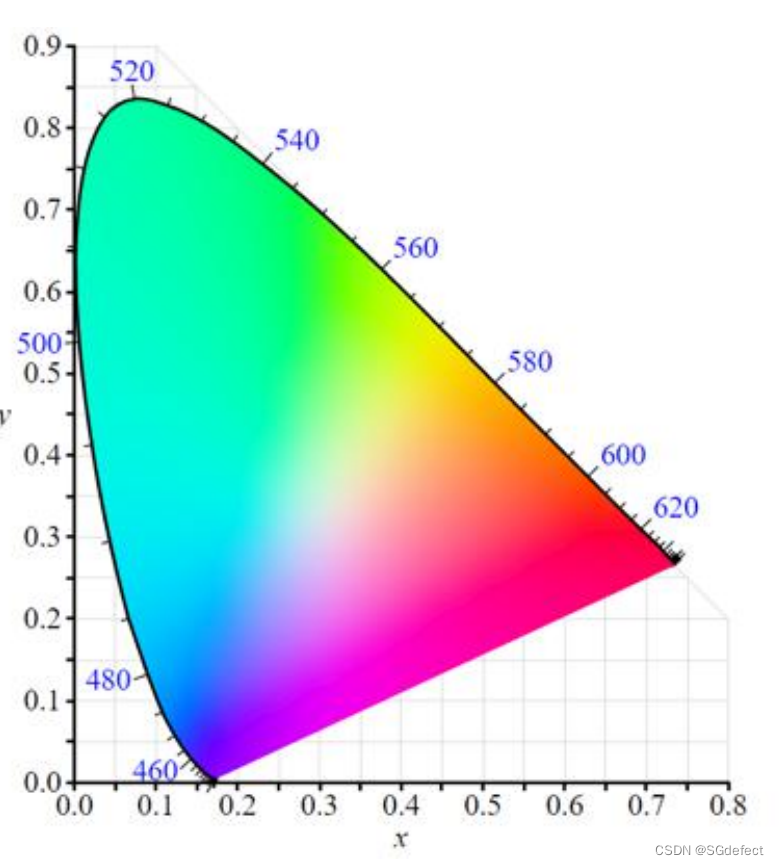
4.CIE-XYZ颜色空间
按人类视锥细胞测定,主要用于摄影:
增强图像对比度
将一张图片的数据按直方图来进行整理
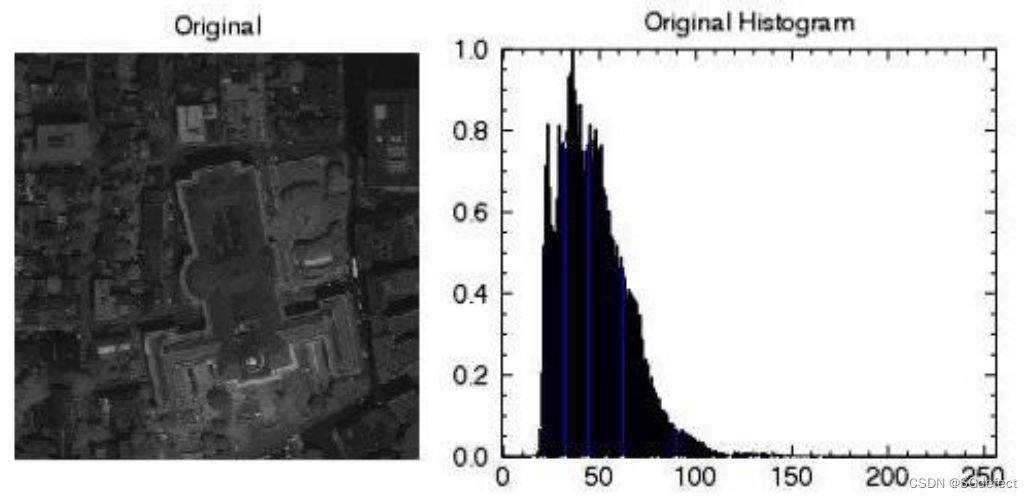
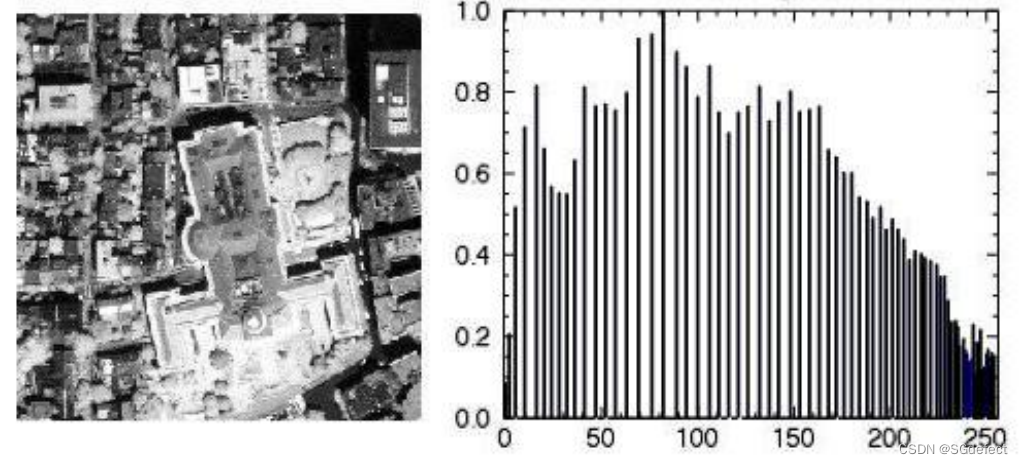
可以看到像素的灰度值集中在某一段内,导致图片看起来不清晰,如果把集中的值非线性拉伸到整个横坐标空间,则图片对比度会更强,分配的方法则是让整个横坐标上平均每一段所拥有的像素点大致相同
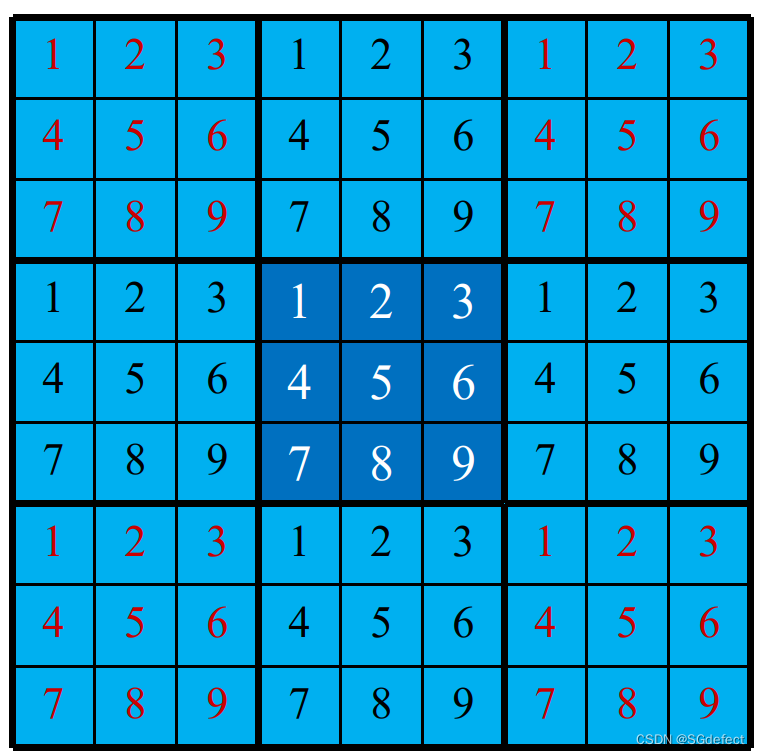
利用这样的原理,就有自适应直方图均衡算法(AHE):设置一个移动模板,在原始图片上按特定的步长进行移动,每次移动之后都对模块内做一次直方图的均衡,映射后的结果赋给区域内的点,最终每个点的值取多次赋值的平均值。
这样的方法一想就知道不同的模块之间颜色区域一定不是连续的,如下:
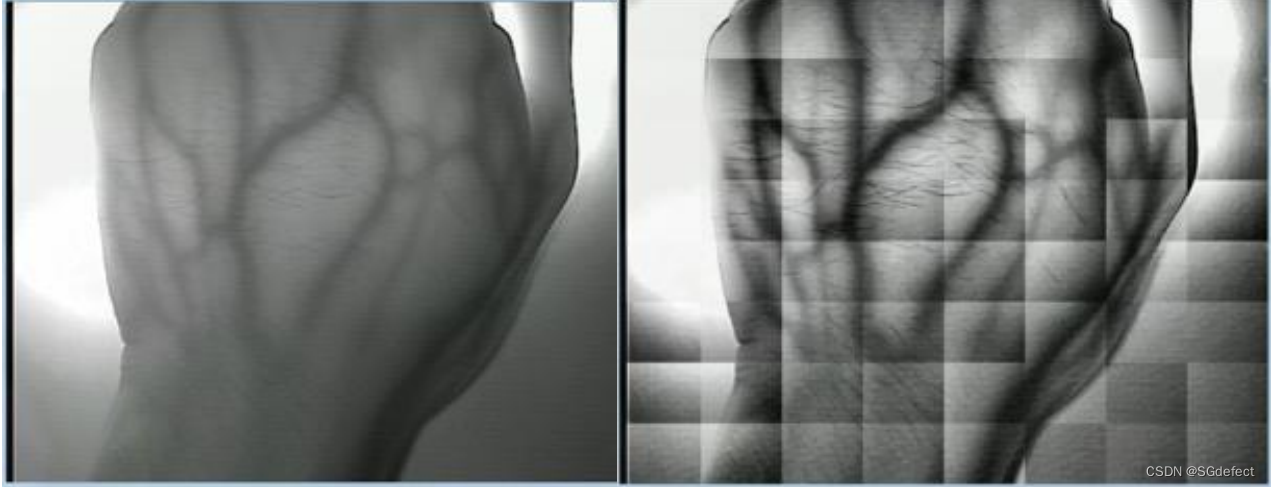
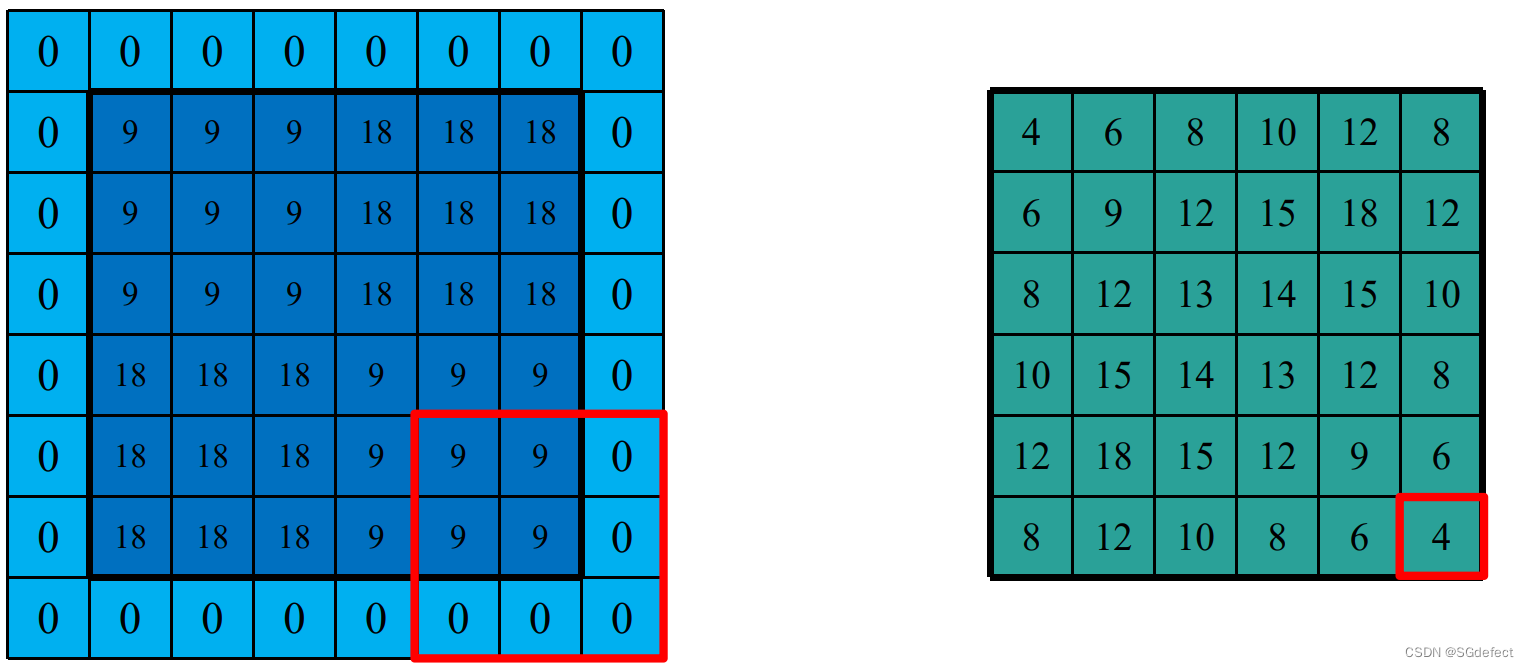
虽然增强了对比度,使图片特征更加的明显,但不同区块之间的不连续灰度也带来了其他的干扰信息,所以就有限制对比度的自适应直方图均衡算法(CLAHE):
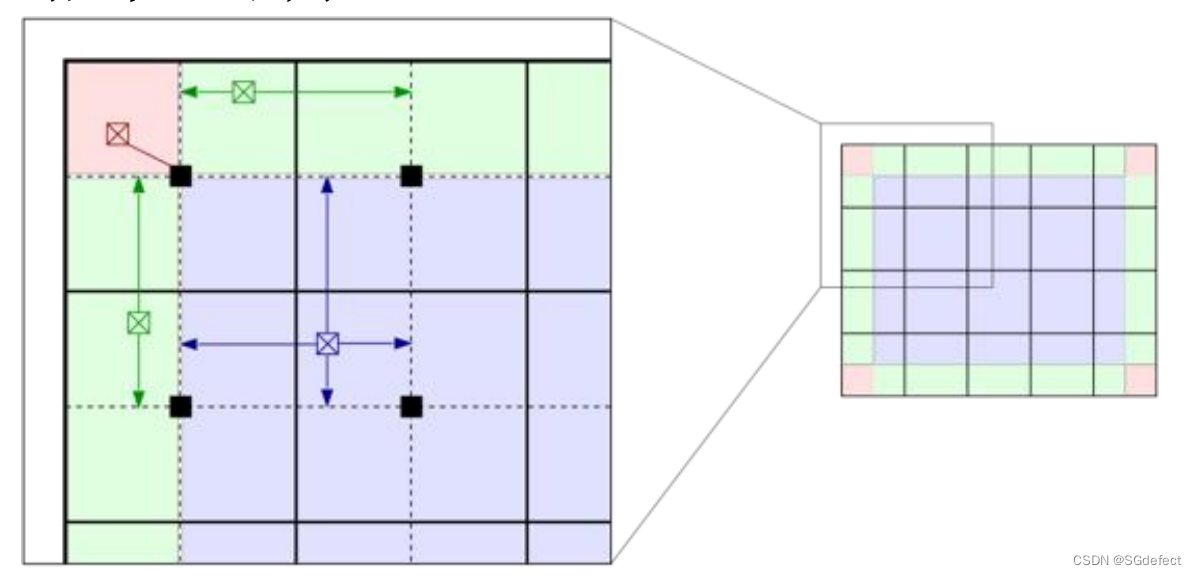
在移动模块内做直方图均衡之后,映射函数赋值给四个黑点以及边角的粉色区域,绿色区域则由相邻两个黑点灰度做线性插值所得,紫色区域有相邻四个黑点灰度做双线性插值所得。效果如下:

在opencv调用clahe代码如下:
import cv2
import matplotlib.pyplot as plt
img = cv2.imread('timg.jpg',0) #直接读为灰度图像
#res = cv2.equalizeHist(img)
clahe = cv2.createCLAHE(clipLimit=5,tileGridSize=(10,10))
cl = clahe.apply(img)
#plt.subplot(131),plt.imshow(img,'gray')
#plt.subplot(132),plt.imshow(res,'gray')
#plt.subplot(133),plt.imshow(cl1,'gray')
# clahe1 = cv2.createCLAHE(clipLimit=10,tileGridSize=(10,10))
# clahe2 = cv2.createCLAHE(clipLimit=50,tileGridSize=(10,10))
# clahe3 = cv2.createCLAHE(clipLimit=100,tileGridSize=(10,10))
# clahe4 = cv2.createCLAHE(clipLimit=200,tileGridSize=(10,10))
#
# cl1 = clahe1.apply(img)
# cl2 = clahe2.apply(img)
# cl3 = clahe3.apply(img)
# cl4 = clahe4.apply(img)
#
# clahe5 = cv2.createCLAHE(clipLimit=10,tileGridSize=(20,20))
# clahe6 = cv2.createCLAHE(clipLimit=10,tileGridSize=(60,60))
# clahe7 = cv2.createCLAHE(clipLimit=10,tileGridSize=(150,150))
# clahe8 = cv2.createCLAHE(clipLimit=10,tileGridSize=(300,300))
#
# cl5 = clahe4.apply(img)
# cl6 = clahe4.apply(img)
# cl7 = clahe4.apply(img)
# cl8 = clahe4.apply(img)
plt.subplot(121),plt.imshow(img,'gray')
plt.subplot(122),plt.imshow(cl,'gray')
# plt.subplot(263),plt.imshow(cl1,'gray')
# plt.subplot(264),plt.imshow(cl2,'gray')
# plt.subplot(265),plt.imshow(cl3,'gray')
# plt.subplot(266),plt.imshow(cl4,'gray')
# plt.subplot(267),plt.imshow(cl5,'gray')
# plt.subplot(268),plt.imshow(cl6,'gray')
# plt.subplot(269),plt.imshow(cl7,'gray')
# plt.subplot(2,6,10),plt.imshow(cl8,'gray')
plt.show()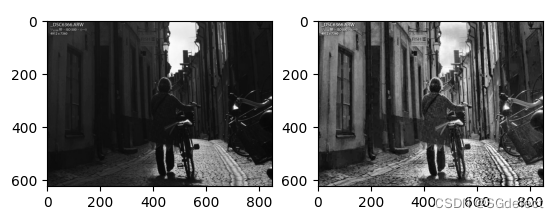
在调用中需设定两个参数:
clipLimit:限制对比度的阈值,调的越高则图像对比度更强,但噪声也更强
tileGridSize:定义移动模块大小,模块越大则图像越平滑,但对比度也降低
腐蚀与膨胀
腐蚀用来消除噪点,同时消除部分边界值,导致图像整体缩小
膨胀用来使目标特征值增大,导致目标整体放大
应用不多详情参考:(11条消息) 腐蚀与膨胀算法_腐蚀膨胀_凉拌海蜇丝的博客-优快云博客
滤波/卷积
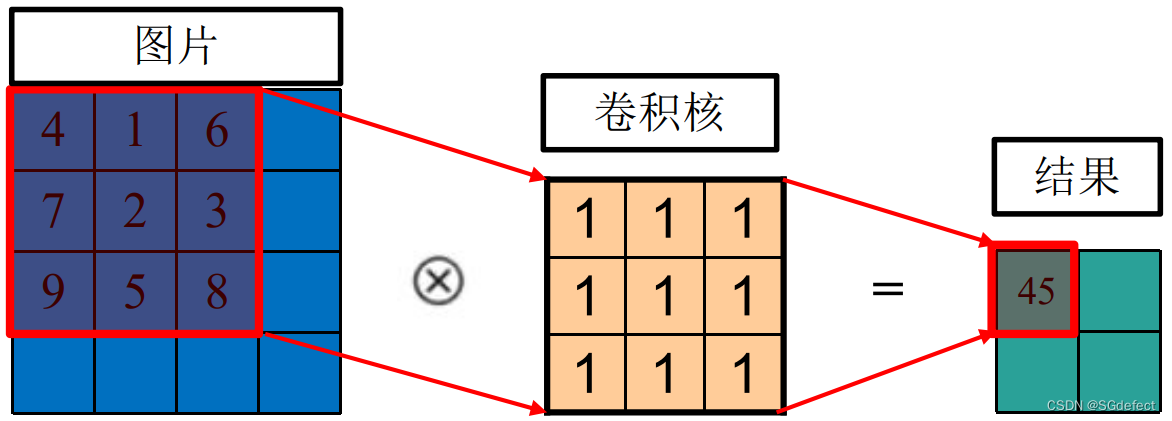
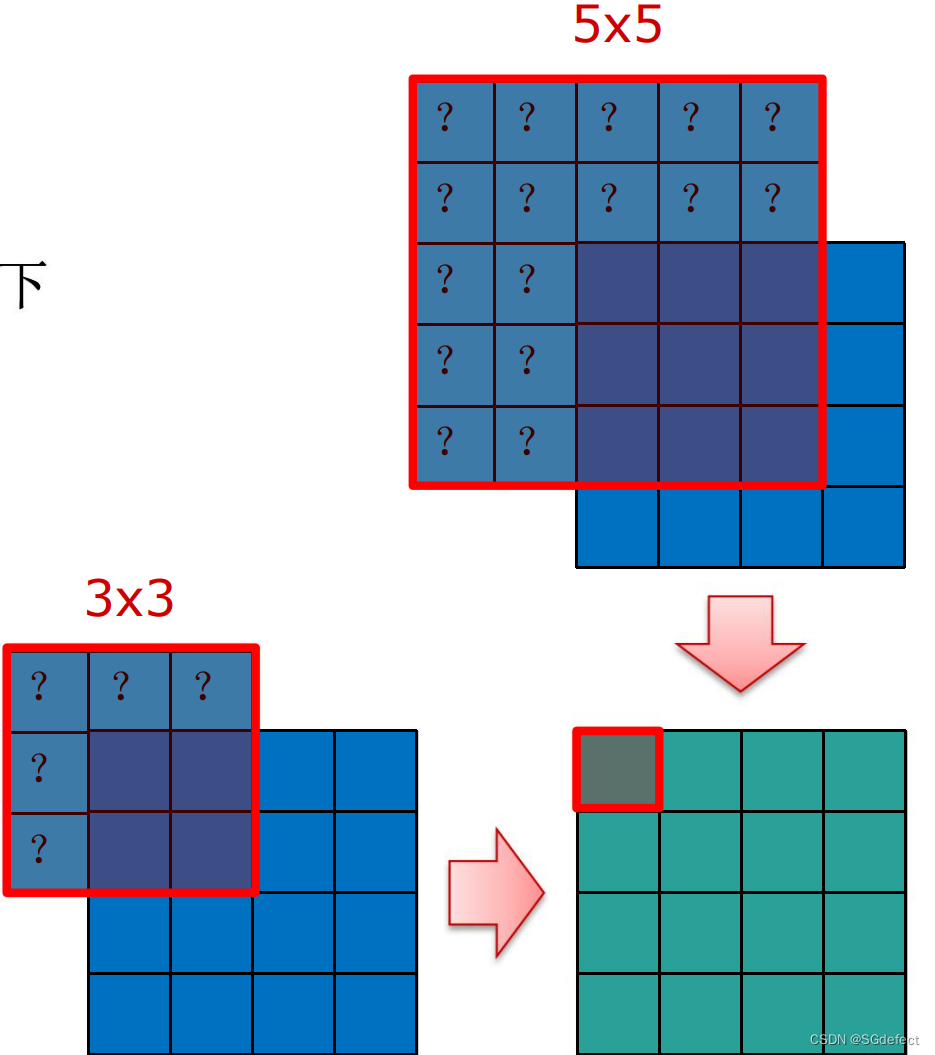
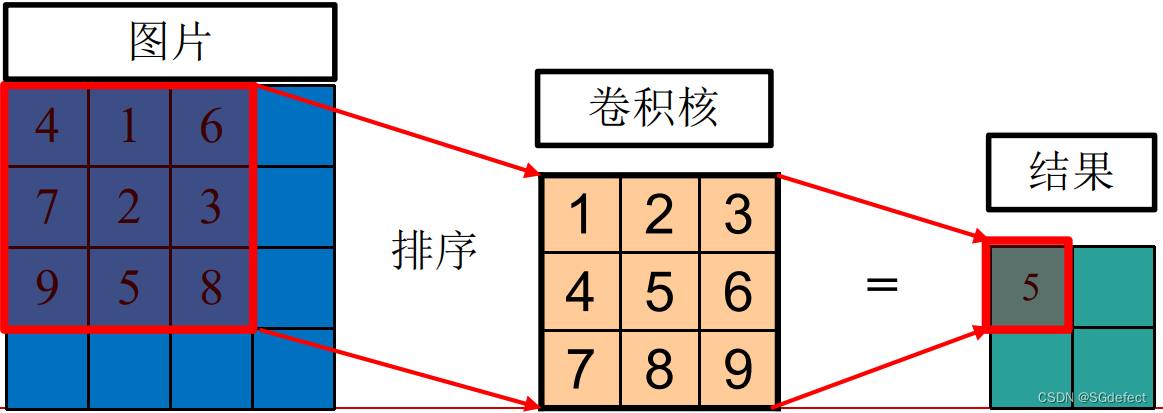
笼统的指在图片某个位置上基于其邻域的函数计算,基本形式为
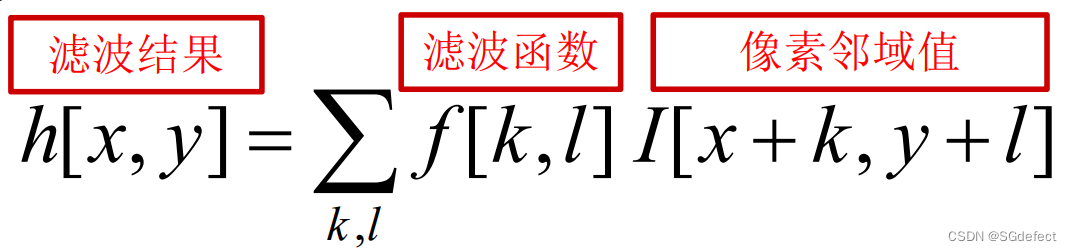
(x,y)是像素在图片中的位置坐标,(k,l)是像素在卷积核中的位置坐标,f(k,l)即为卷积核在(k,l)上的权重参数,过程表现为下图:
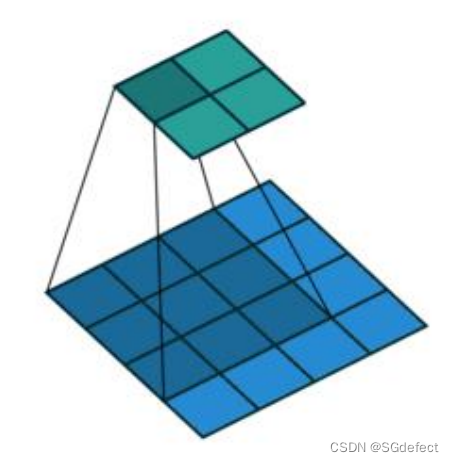
在卷积前后为了保持图片尺寸不变,需要在卷积过程中对图片进行边界填充,卷积核越大则补充越多,
填充的方式有:
- 补零(zero-padding)
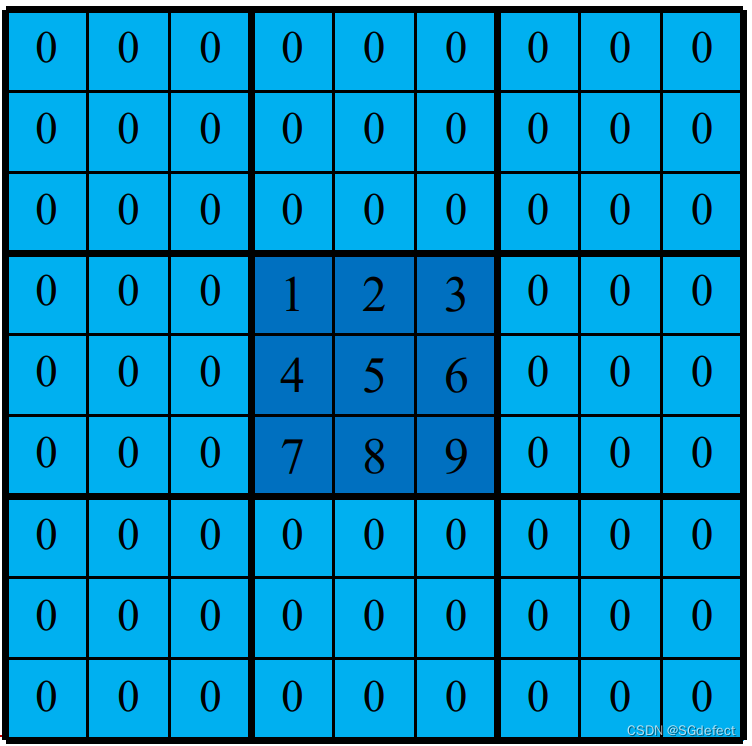
- 边界复制(replication)
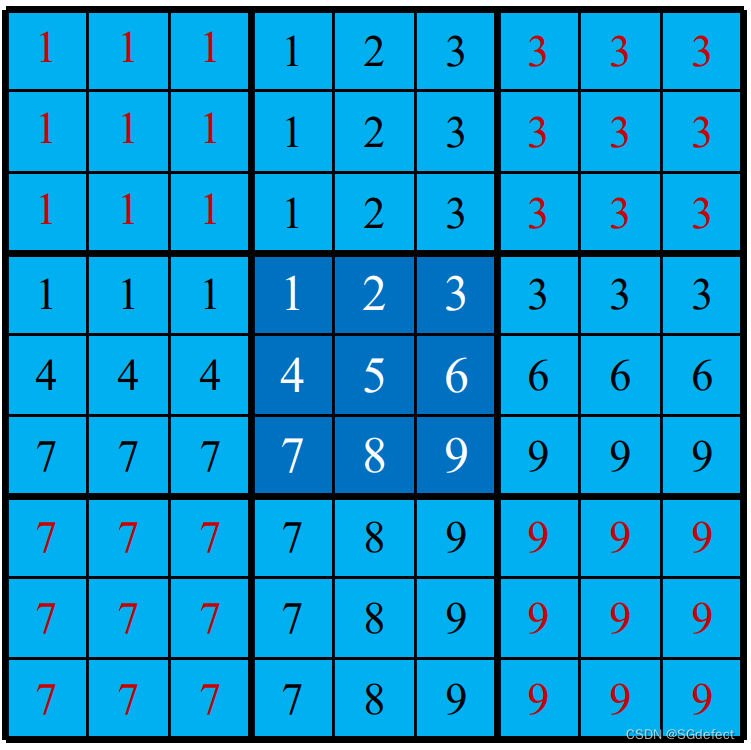
- 镜像(reflection)
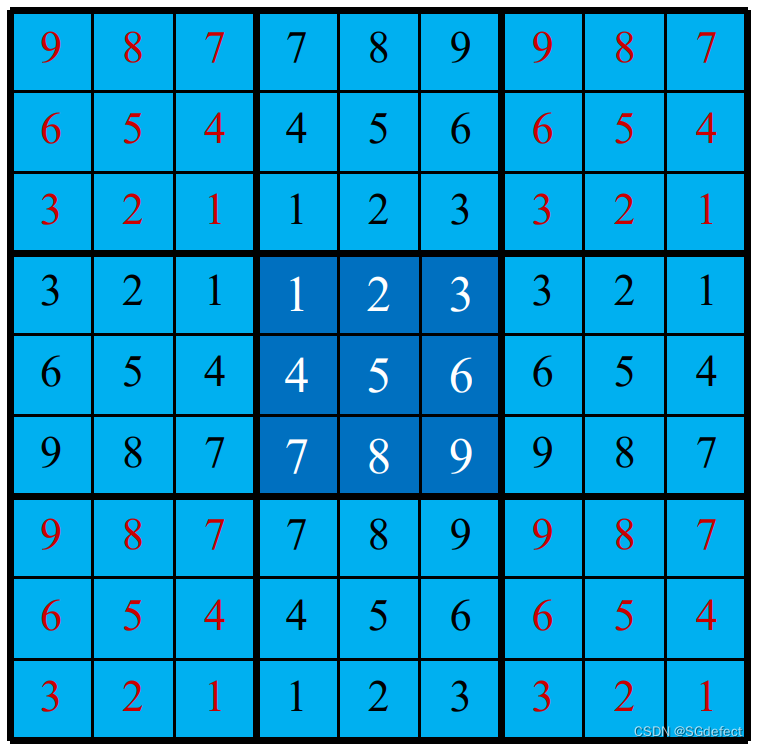
- 块复制(wraparound)
平滑均值滤波
先在边框周围补0,每个像素点都是周围数个像素点的平均值
均值滤波会使图像变得模糊,核选的越大,图像也更模糊,也不能很好地去除噪声点。
平滑中值滤波
选取一个奇数核,确保核内像素点按大小排序存在中值,选取中值作为滤波后的像素值
中值滤波同样会使图像模糊,核越大图像越模糊,但可以有效去除椒盐噪声
平滑高斯滤波
模拟人眼关注中心的特点,不同位置的像素赋予不同的权重,中心的权重值更高,越边缘越低,河内所有权重系数和为1
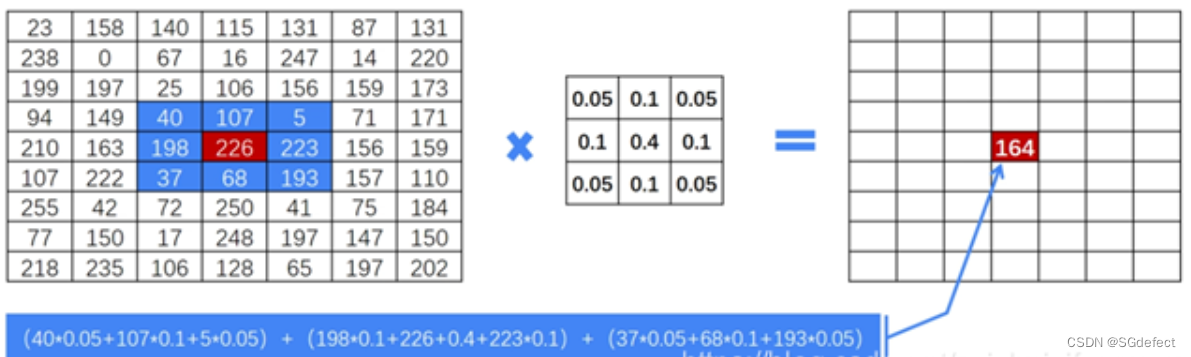
高斯滤波可以有效去除高斯噪声
梯度Prewitt滤波
算子分为两种,一种在水平方向呈现梯度,一种在垂直方向呈现梯度
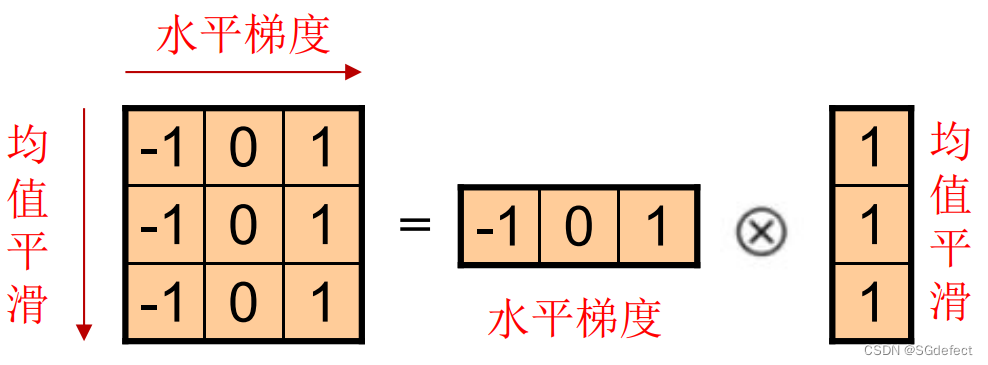
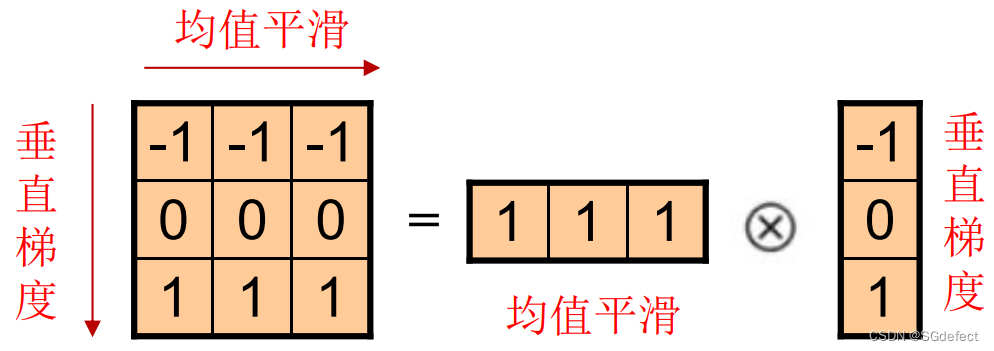
主要用来对图像边缘进行检测
梯度Sobel滤波
sobel算子相较于prewitt算子在非梯度方向上用高斯平滑替代均值平滑
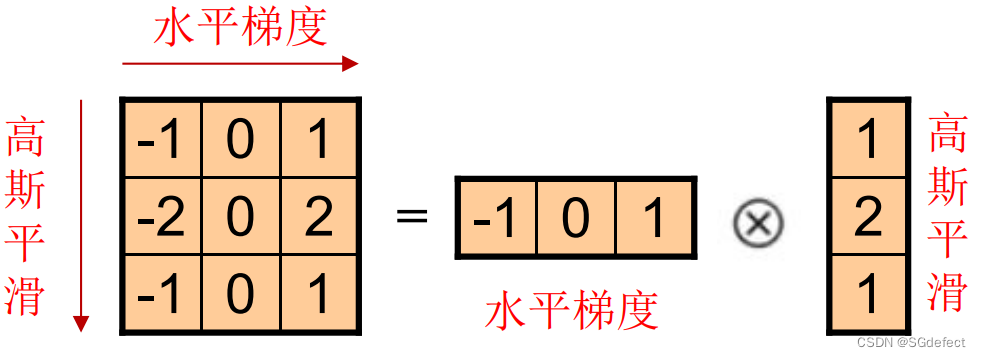
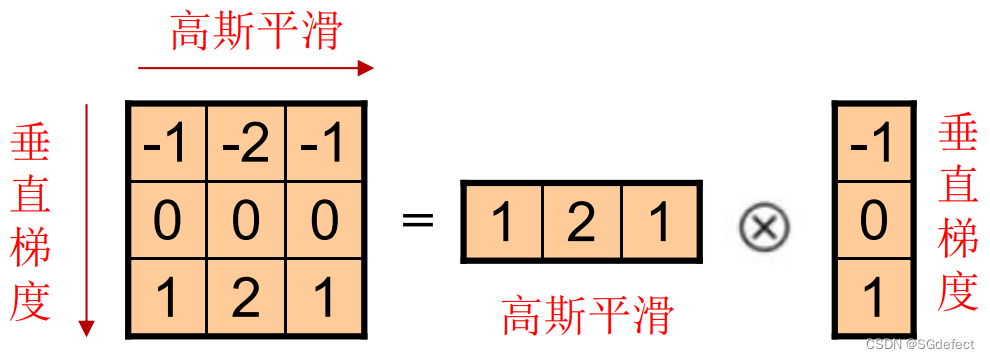
主要用来实现图像锐化突出边缘轮廓
梯度Laplacian滤波
使用二阶微分算子
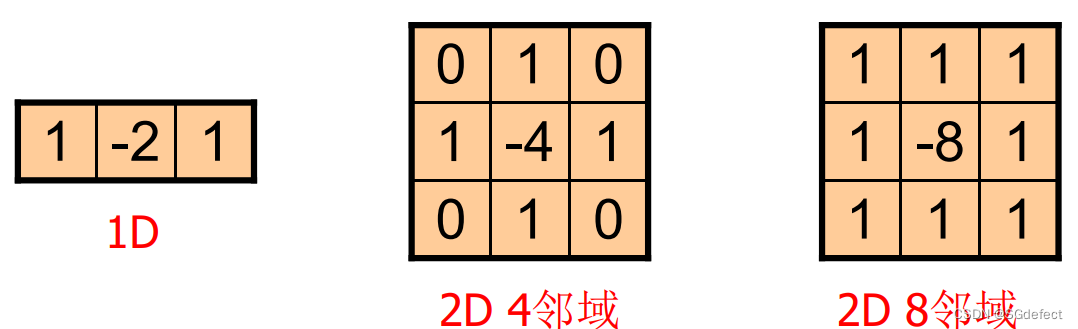
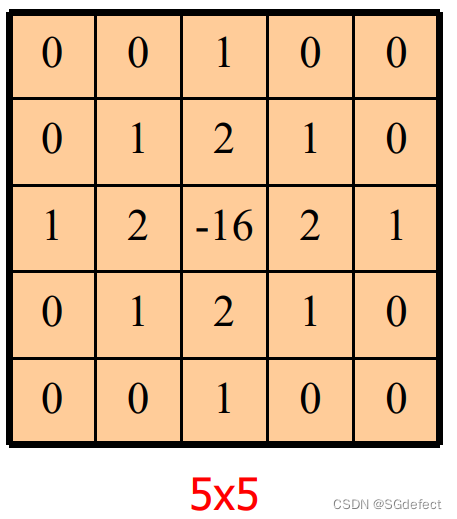
用于图像增强和边缘提取



















 4531
4531

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









