



以道路交互为重点的方法在自动驾驶货运自行车作为新型城市出行服务中的应用
摘要
阿ura项目(autonomes Rad,即自动驾驶自行车)源于城市环境中共享单车系统中自行车可用性和可及性的现实问题。自动驾驶为此提供了全新的解决可能性。通过作为高效且生态友好型交通解决方案的自动驾驶货运自行车,我们可以朝着交通转型迈出重要一步。然而,它们面临的主要挑战之一是与其他道路使用者——尤其是最脆弱的行人——进行交互的能力。但关于自行车在自动驾驶车辆交互概念这一紧迫议题上的研究仍十分有限。通过我们正在进行的研究,旨在为人类与自动驾驶货运自行车的交互研究做出贡献,并获得有助于设计自动驾驶自行车通信界面的发现。为此,我们设计了一种以道路交互为重点的方法,涵盖三个科学领域:计算机科学、设计工程和环境心理学。本文介绍了这一整体跨学科方法的设计,包括通过视觉和听觉信号为自动驾驶自行车开发交互概念的一系列研究。同时展示了当前的研究现状以及研究实践中的部分初步发现。
关键词 – 自动驾驶自行车,交互设计,非语言交流,信号,城市,环境。
一、引言
共享单车是未来城市和气候友好型交通的一种良好替代方案——然而,从用户和运营商的角度来看,其使用存在相当大的障碍。经常被批评的一点是自行车的分布问题。这些自行车要么占用大量甚至大面积的停车空间,然后又需要耗费巨大成本进行重新分配。解决这一问题的方法可能在于自主驾驶技术[1]。该技术由于成本和技术要求,目前主要聚焦于汽车领域,但随着技术进步,它已成为货运自行车等小型车辆的可行选择。自动驾驶货运自行车将实现一种更环保、更紧凑的出行方式,可大幅减少空气污染、能源消耗和空间占用,同时还能货物运输。我们的研究聚焦于新型项目AuRa,旨在实现这种出行服务。作为一项全新开发,该项目在成功实施过程中面临诸多挑战,例如确保自动驾驶模式下的安全运行。其中,与公共空间中的其他实体(如行人、骑自行车者和汽车驾驶员)进行交互是一个关键点。为了使他人感到安全并接受该车辆作为一种可持续交通的良好模式,满足自动驾驶自行车与其他交通参与者之间的相互沟通需求至关重要。为解决这一问题,必须为AuRa自行车设计一个复杂的通信界面。实现城市安全骑行能力和自动驾驶自行车通信界面的目标是采用一种小型且节能的信号概念,在日常交通场景中展示车辆意图。该系统需要外部设备(发射器)以及一组定义范围(语言集)的信号,包括通过设备传输的听觉和视觉信号(通信工具)。尽管存在多种可能的解决方案,但也有一系列关于法律法规、技术可行性、设计和人机工程学方面的需求和限制。挑战在于为AuRa项目找到合适的组合。为此,我们结合三个科学领域,设计了一种以道路交互为重点的方法,用于研究通信概念、定义技术要求、原型设计以及收集可用性数据。
II. 研究现状
关于自动驾驶车辆的交互概念研究,尤其是在自行车方面的研究,在科学界尚未得到足够关注。通过我们的方法,我们力求为自动驾驶货运自行车作为一种新型城市出行服务的人机交互研究做出贡献。为了在我们的方法中找到可测试的合适通信策略,我们广泛开展了针对城市自动驾驶和机器人技术领域人机交互方面创新和趋势的文献研究。所收集的实证研究用于获取广泛测试通信策略及其应用领域涉及自动驾驶汽车([2],[3],[4],[5])、非人形机器人([6],[7],[8])及其他小型自主车辆([2],[9])。这些研究中大部分使用灯光信号[10]和/或显示屏,灯光通常用于传达主体状态([7],[8]),而显示屏还用于显示符号或眼睛等特征([11])。仅有一项研究在汽车上使用了投影仪([2])。约一半的研究还使用声音作为辅助手段,这些声音可分为语言([4],[2])和非语言([3],[6])两类。此外,还分析了传统骑行者与环境的交互。通信可以是正式的,如交通标志和车辆信号,也可以是非正式的,如交通参与者的非语言信号。
对于骑自行车者和行人等无保护道路使用者而言,非语言交流至关重要,可提高其可见性并使其他交通参与者能够预测其行动。关于声音信号,对于电动汽车而言,必须指出的是,自2021年起,电动汽车在行驶速度不超过20公里/小时时必须发出噪声。该系统称为声学车辆警示系统(AVAS)([12])。
自动驾驶自行车不会在街道上行驶,而仅在指定自行车道上行驶。基于这一点,我们结合以骑自行车者和行人事故统计为重点的并行文献研究,选择了不同的典型关键交通场景。同时,我们参考了德国联邦统计局 2018[13] 关于道路上自行车事故以及涉及人身伤害的交通事故的结果。通过交通心理学文献研究,我们归纳出不同类别,包括过马路、突然出现以及突然且意外的反应 ([14],[15],[16],[17])。基于这些发现,我们根据通信需求推导出五种关键交通场景:“自动驾驶模式:开启”、“左转/右转”、“停止”、“加速”、“减速”。
III. 方法
本方法的贡献在于通过视觉和听觉信号研究人类与自动驾驶货运自行车的交互。为此,我们设计了包括初步研究(焦点小组)、专家小组(包含构思阶段和原型设计)以及一系列可用性研究(问卷、混合现实实验和仿真)在内的流程,以支持AuRa自行车的开发。目前研究正在进行中,我们已经完成了该方法5项研究中的3项。
表1概述了本方法的路线图及当前进展。
| Date | 方法 | 描述 |
|---|---|---|
| 早期 2019 | 焦点小组 | 对没有通信工具的自行车的印象和看法 |
| Late 2019 | 专家小组 | 技术和法律限制,技术可能性,人机工程学需求 |
| 早期 2020 | 预测试 | 数字评估,使用图像和声音片段的原型通信工具 |
| Late 2020 | 研究1 | 通信评估 360度混合现实中的工具 模拟器;关注需求 行人 |
| 研究2 | 通信评估 驾驶模拟器中的工具;焦点 关注汽车驾驶员的需求 |
A. 焦点小组(初步研究)
2018年,进行了三个焦点小组讨论,以了解人们对自动驾驶货运共享单车系统的第一印象。在马格德堡和柏林举行的这些针对骑自行车者和汽车驾驶员的焦点小组讨论中,探讨了自行车与其他交通参与者的交互问题。所有人都一致认为,包括汽车驾驶员在内的所有交通参与者都必须能够看到该自行车。有些人提出可以像儿童自行车那样,在自行车上安装一个安全旗。同时,所有人都认为必须明确标识这辆自动驾驶货运自行车是自主的。此外还讨论了通信策略的语言无关性,因为通信应能让每个人都清楚理解。一些人提到希望自行车行驶时发出不扰人的声音。这些焦点小组为通信策略的设计提供了一些方向。但同时也表明,将创新车辆引入交通会引发许多问题,必须进行科学研究。
B. 专家小组
在生成外部人机界面的第一组设计过程中,我们必须定义技术和法律限制、人体工程学要求,并确保技术可行性。这包括附加硬件的安全性、效率、设计与美观、功耗与供电、重量和稳定性等一般性方面。为涵盖所有交通参与者群体及其需求,强烈建议采用视觉和听觉信号的组合 [18]。
听觉信号可以是语音或其他声音。发射器通常是需适配车辆的扬声器。通信工具可以是音调、铃声、喇叭或其他随机声音,也可以是语音输出、词语或完整句子。语音的一个明显缺点是语言障碍[2]。由于这涉及安全问题,因此本研究排除了语音。在本研究中,我们决定探讨主体用户感知的问题:自行车在运行时应该听起来像传统货运自行车,还是应该听起来像未来感车辆?
对于视觉通信符号、词语、交通标志、表情符号和手势,以往的研究中已经进行了测试。发射器通常是一种照明装置,如LED、显示器或旋转信标。根据行人的位置,视觉信息可能难以被看到[19]。由于我们希望自行车具有很高的可见性,并且在焦点小组中也讨论了安全旗,因此我们不仅想测试安装在……上的发射器
到前面的箱子,还有一个塔 [9]。我们必须根据自行车上的具体安装位置来限制可连接屏幕的尺寸,例如安装在塔上的屏幕要比安装在自行车前部或侧面的屏幕更小。
另一个重要方面是,当用户像平常一样直接控制自行车时,需保持手动驾驶的真实性。这包括合理布置设备位置,以免影响驾驶员的视野和活动自由。此外,在自动驾驶模式下保持稳定的行驶特性对于支持自行车的巡航控制至关重要。其任务之一是始终确保自行车的稳定性,并允许路径规划模块利用急转弯和较高的路缘石。
考虑到这一点,我们排除了使用投影仪的所有可能性。
—数字原型 Depending on earlier li 通过文献研究、构思阶段以及人机工程学和技术可行性分析,我们明确了每个场景中希望测试的概念(发射器和通信工具)。每个场景选择了两种听觉信号,分为传统的和“未来感”的自动驾驶车辆声音。在选择视觉信号发射器的过程中,选定了三个通道:安装在塔上或自行车箱体上的LED灯、旋转信标和显示器。针对视觉标志,为每个场景分别选定了形状、颜色和符号。
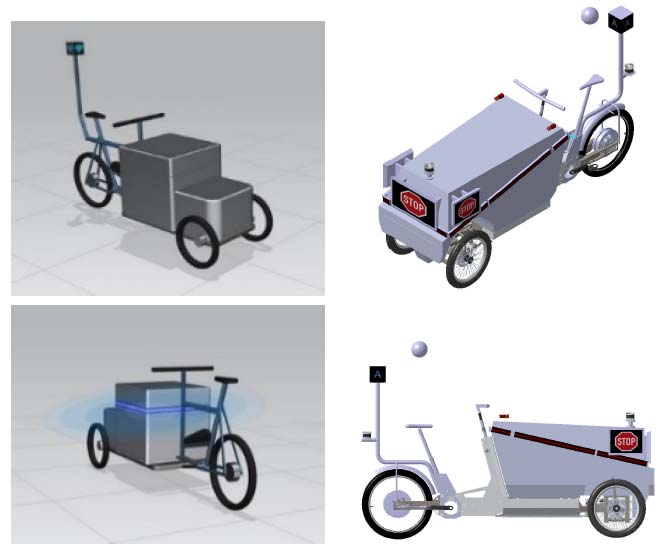
根据设计过程的早期阶段,我们选用了草图绘制和在三维软件(西门子NX和Catia V5)中创建数字原型的原型设计技术(图1)。这些方法使我们在可视化备选方案时具有更高的灵活性,足以真实地展示复杂的设计细节。
C. 预测试
为了衡量和量化所提出替代设计的效率,并确定未来工作中需要重点关注的改进方向,我们开展了一次可用性研究会话,其中包括一项在线问卷和两次现场实验。收集定量和定性可用性数据将有助于我们实现目标。我们计划操纵性能和用户认知方面的差异感知以及与替代设计概念的交互。我们使用包括性能测量指标和自报告测量指标在内的预定义的测量指标集来评估每个设计,这些指标与[20]相关。
为了缩小后续3D仿真研究中通信策略的潜在设计方案范围,我们开展了初步研究,对五个定义的场景中的约60种替代设计方案进行了比较。通过使用SoSci Survey软件[21]以德语进行的在线问卷收集了定量数据。我们在马格德堡奥托·冯·古埃里克大学对设计概念的影响进行了学生测试。该初步研究使我们首次了解了如何让潜在用户参与开发和设计过程,以了解其偏好。
样本(N = 66)通过Max实验室(马格德堡经济实验研究实验室)于2020年2月19日、20日和21日三个阶段获取。两个小组的平均年龄为 $M_{age} = 24.18$。
对于听觉信号,研究结果表明,参与者更喜欢传统声音而非现代声音。视觉信号的结果以百分比表示,显示了与备选项相比,有多少参与者选择某种设计作为其最喜爱的设计。根据第一种场景,在未呈现塔的小组中,蓝色WiFi符号与“Autonom”文本(英文:autonomous)组合被评为最易理解的信号,得票率为 79.4%。在塔组中,显示蓝色“A”的显示器获得了最佳排名(28.1%)。关于注意场景,在无塔小组中,“Achtung!!!”文本(英文:attention)被认为最贴切,占比33.3%。塔组则认为红色LED最合适(31.3%)。
在第三种场景(方向指示)中,两个小组均认为橙色自行车和绿色表示的人形分别结合指示方向的箭头最为合适(无塔组= 64.7%,塔组= 68.8%)。在第四种场景(停止信号)中,无塔组认为红色LED和停止标志最易理解(31.3%)。在塔组中,停止标志被选择最多(54.8%)。在最后的驶离场景中,无塔组认为带速度指示器的绿色箭头最易理解(36.4%)。塔组则认为WiFi符号最合适,占比51.6%。未来工作将优化评分最高的设计,开发附加功能,并进一步研究它们对用户的影响。
D. 研究1 (混合现实实验)
由于我们无法确保参与者在填写在线问卷时能够完全置身于相应情境中,因此我们计划在2020年9月利用这些结果,在混合现实实验室Elbedome [22]开展一次复杂的混合现实实验。这一后续计划的步骤必将提供有关在更真实环境下哪些概念更容易被理解的重要结果。通过这种方式,我们将努力获得更具代表性的样本并提高沉浸感。需要指出的是,此次样本仍将由德语使用者参与者组成,但这次将是马格德堡市民。此外,我们第一个样本仅由学生构成。尽管学生是一个易于接触的群体,但他们的感知可能无法推广到更广泛公众。因此,我们在本研究中涵盖了更多样化的参与者。
E. 研究2(仿真)
在驾驶模拟器中,我们计划评估通信工具,并将焦点放在汽车驾驶员的需求上。我们仍需确定实验中所采用的具体设计概念的大量细节和问题。
IV. 讨论与展望
为确保自动驾驶自行车面向用户的操作简便且用户友好,开发复杂的通信界面是一项长期的跨学科过程,我们已着手开展。需要进行一系列研究来设计并改进这一重要任务。目前,我们正处于研究方法的中期阶段。我们正在推进工作,并准备于2020年9月在混合现实实验室[22]中开展首次复杂的现场实验。由于其规模远超传统投影系统,该实验室适用于以1:1比例进行演示和交互式原型可视化,具备360°全景和地面投影面,可在虚拟世界中实现逼真且按比例的移动。在下一次成果中,我们计划分享并讨论此次即将开展的研究实践中的定性发现。

















 1149
1149

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









