




 本文详细介绍了约束最小二乘(CLS)问题的数学推导和解决方案,通过拉格朗日乘数法解决加权最小二乘问题。具体到物理问题,分别针对求解力的模的最小值和力变化模的最小值进行了讨论,并给出了相应的Matlab代码实现。通过KKT条件验证了解的正确性,展示了CLS在实际问题中的应用。
本文详细介绍了约束最小二乘(CLS)问题的数学推导和解决方案,通过拉格朗日乘数法解决加权最小二乘问题。具体到物理问题,分别针对求解力的模的最小值和力变化模的最小值进行了讨论,并给出了相应的Matlab代码实现。通过KKT条件验证了解的正确性,展示了CLS在实际问题中的应用。
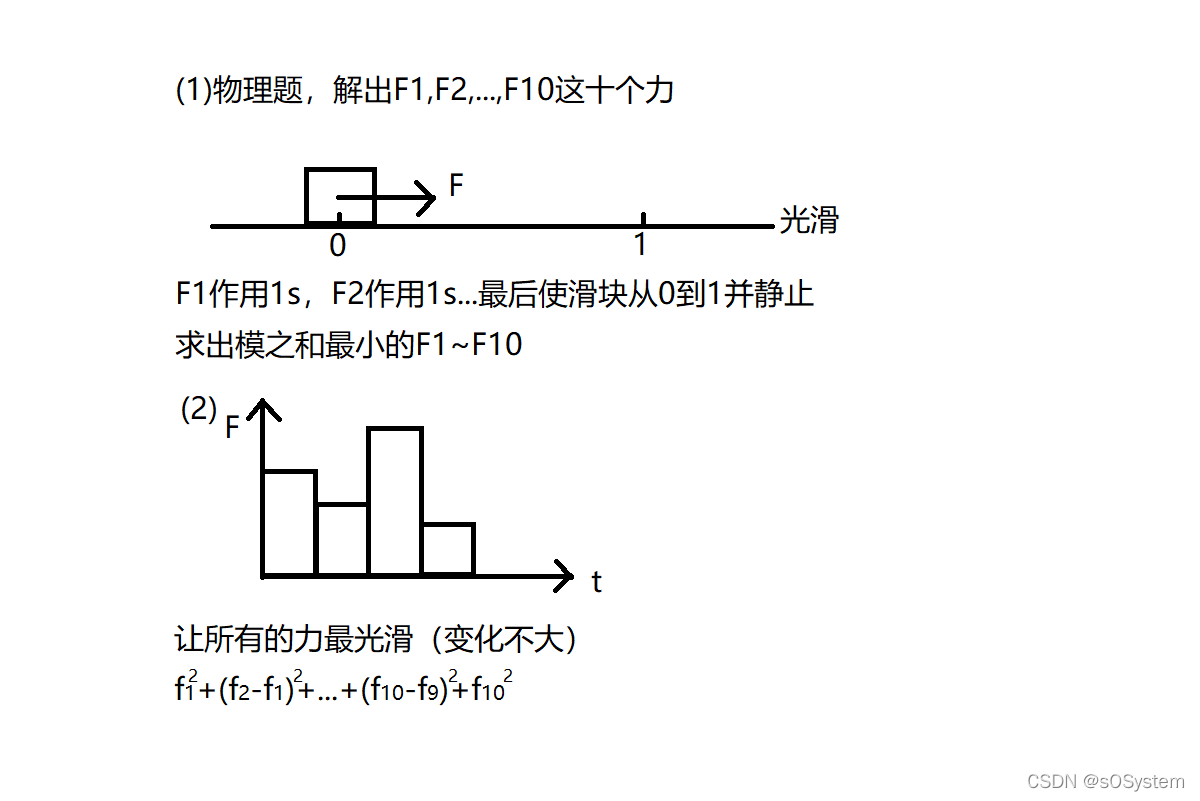
这一整道题是关于约束最小二乘(CLS constrained least squares)的问题。
推导
CLS要解决的问题是:
最小化 
约束于 ![]()
目标函数为
![]() 是约束条件
是约束条件
最后要找到的![]() 一定满足
一定满足![]()
我们要找到的![]() 满足于
满足于 ![]() 并且对任何满足于
并且对任何满足于 ![]() 的n维向量x都满足
的n维向量x都满足![]()
可以将约束最小二乘想象成加权最小二乘的特殊情况
这是上一个实验中给出的加权目标函数:

改变为:
![]()
的形式,而对于![]() ,将它视为无穷大,因此对于这个加权最小二乘问题,能够解决的办法就是
,将它视为无穷大,因此对于这个加权最小二乘问题,能够解决的办法就是![]()
对于求解约束最小二乘问题,需要用到拉格朗日(Lagrange)乘数法。为了理解在矩阵中如何使用拉格朗日乘数法,我首先复习了一下高数里学到的用拉格朗日乘数法解决极值问题:
给定约束条件 ![]() ,求
,求 ![]() 的极值。
的极值。
解决方法为:构造辅助函数 ![]() ,然后列出:
,然后列出:
三个方程,三个未知数,解得x, y代入![]() 可以求得
可以求得![]() 的极值。
的极值。
拉格朗日乘数法的特点即,对于给定的n个不同的约束,使用n个不同的辅助变量,虽然最后我们并不需要这些辅助变量的值,但这些辅助变量时求解出极值的过程中所必要的。
将拉格朗日乘数法应用于矩阵计算当中
对于求 极值,约束条件为
极值,约束条件为 ![]()
利用拉格朗日乘数法,辅助变量取![]()

分别对各变量求偏导
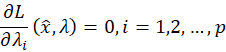
对于第二组的偏导
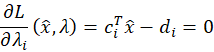
这个式子是已知的约束条件。
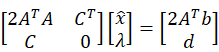
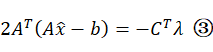
对于第一组的结果:

转换为矩阵的形式:
![]()
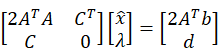
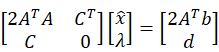
将该式子与 ![]() 结合得到KKT矩阵(关于):
结合得到KKT矩阵(关于):
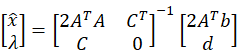
将等式左侧的左边的矩阵放到等式右侧
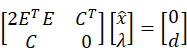
回到这个实验题目中,这个实验是一种特殊的约束最小二乘的情况。结果是求所有力的模的最小值,即![]() ,其中E是单位矩阵,0是0矩阵,即最后要求的结果为
,其中E是单位矩阵,0是0矩阵,即最后要求的结果为![]() ,其中
,其中![]() 为由所有力组成的矩阵。
为由所有力组成的矩阵。
将![]() 代入
代入
得到
进一步简化为
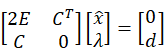
从而推导出
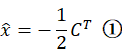
将②式代入①式中得:
![]()
其中![]() 是C的伪逆矩阵
是C的伪逆矩阵
(1)
根据题目条件构造C![]() 矩阵,利用加速度公式
矩阵,利用加速度公式
![]()
![]()
==>
![]()
由此可以得出本题的约束条件为:
![]()
构造出的C矩阵为:

d矩阵为:

矩阵形式表示约束为:

代入公式
![]()
即可得到所求的力的矩阵
Matlab代码实现:
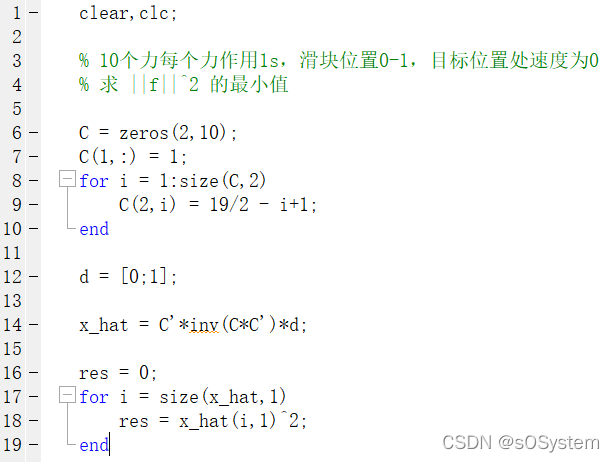
代码中 x_hat 为最终要求的10个力组成的矩阵,res为根据所求的10个力所求的模之和。
计算结果:
10个力分别为
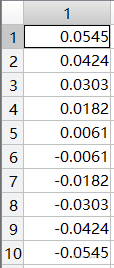
该情况下模之和为0.0030
![]()
(2)
第2小问依然是![]() 的特殊情况,解题思路和第1小问一样,不同的是需要改变用到的物理公式。这题要求的是变化力的模之和的最小值,解题时需要从用
的特殊情况,解题思路和第1小问一样,不同的是需要改变用到的物理公式。这题要求的是变化力的模之和的最小值,解题时需要从用![]() 求最终速度和最终位移转换为用
求最终速度和最终位移转换为用![]() 求最终的速度和最终的位移。
求最终的速度和最终的位移。
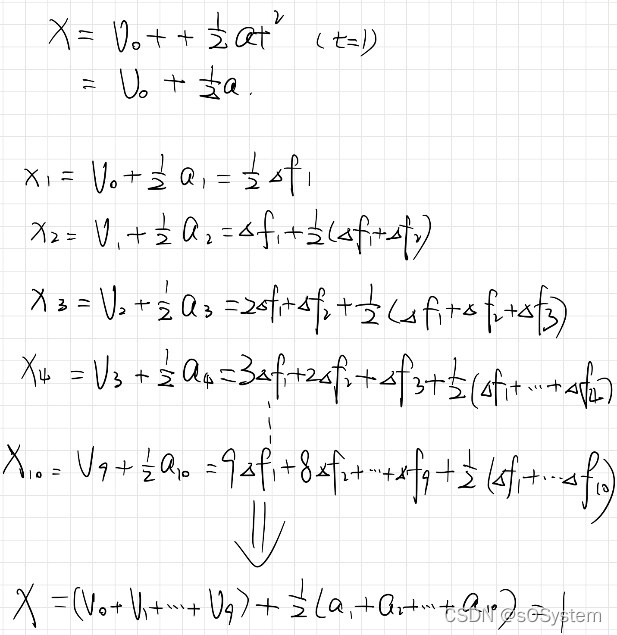
由于推到较为复杂,这里直接放了我的手写推导公式的过程:
每时刻的![]()
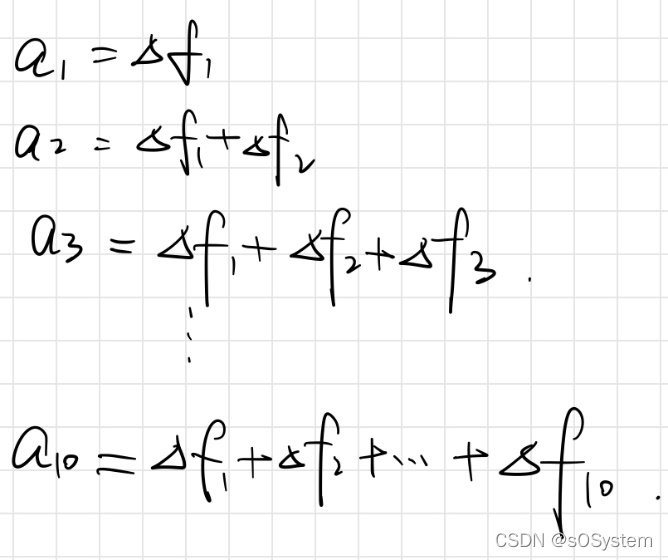
每时刻的v![]()
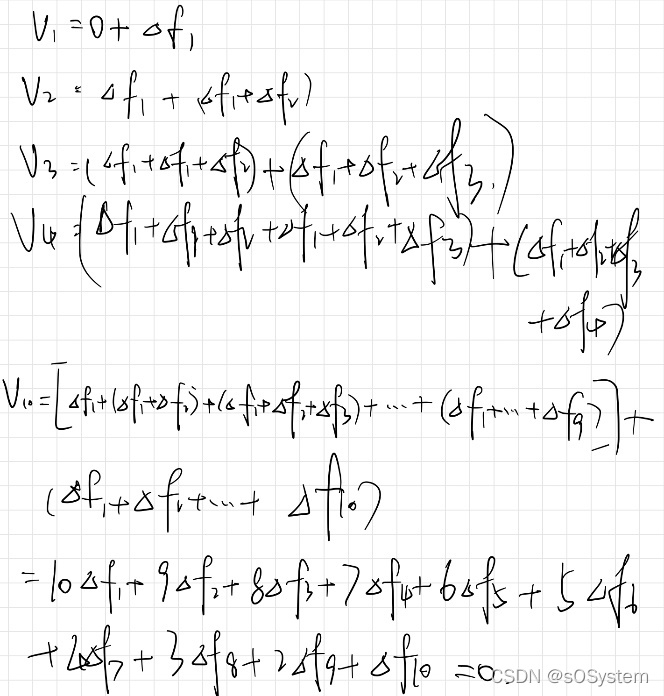
每时刻的位移x![]()
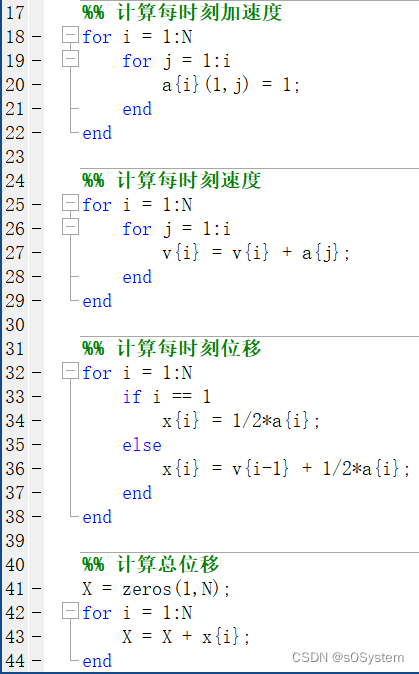
Matlab代码实现:
在Matlab中计算每时刻的a, v, x![]() 以及总的位移X
以及总的位移X![]()
计算结果
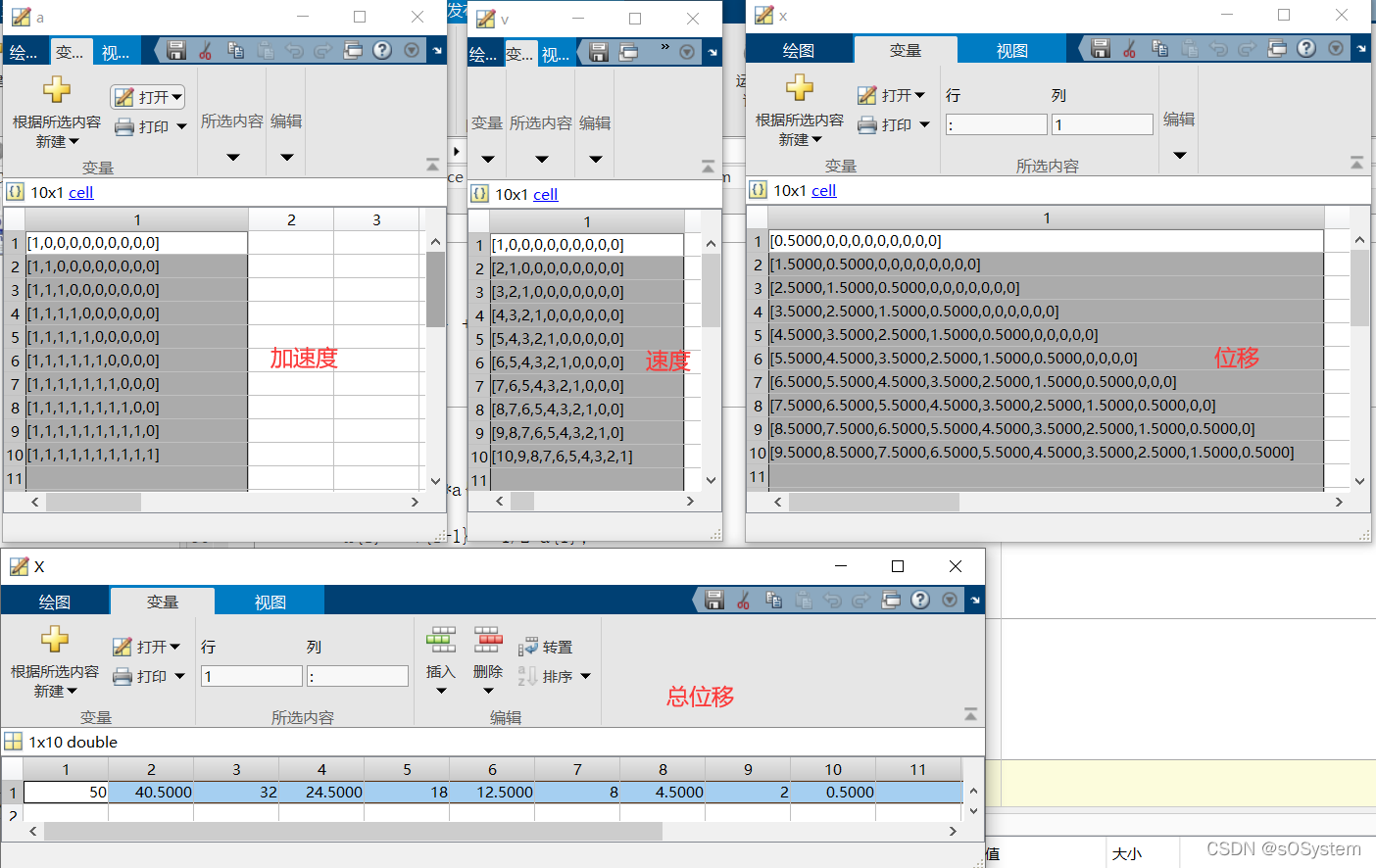
因此![]() 矩阵为:
矩阵为:

Matlab中的计算结果

这里用的是![]() 进行推导,因此最终约束条件为:
进行推导,因此最终约束条件为:

方便起见,还是直接代入推导出的公式
![]()
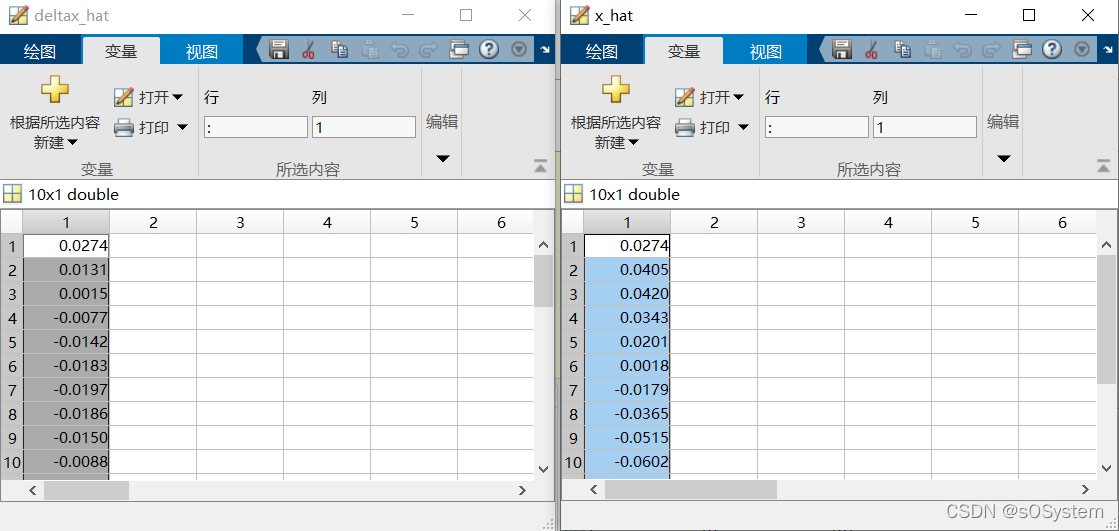
最终结果:
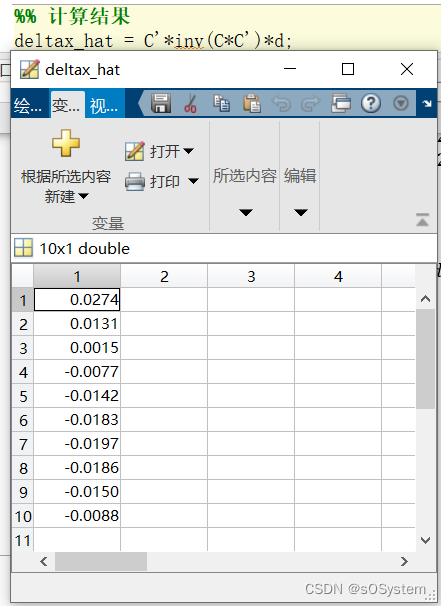
这个结果是每时刻的![]() ,即每时刻力的变化大小,转化为每时刻的
,即每时刻力的变化大小,转化为每时刻的![]() :
:
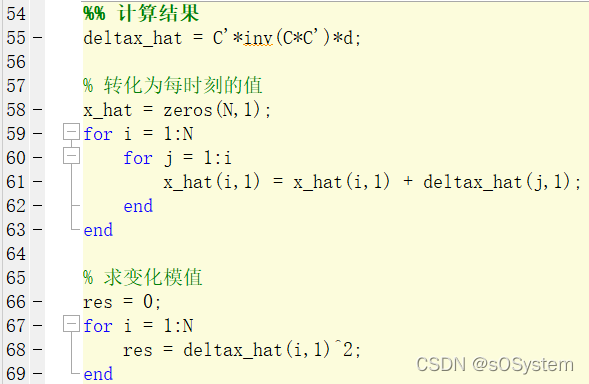
计算结果
该情况下力的变化的模值
![]()
证明
至此该实验利用推导出的公式结合KKT条件计算出了两个小题,但是反推结果,为什么利用KKT矩阵公式求得x![]() 就是最终所需要的结果呢?
就是最终所需要的结果呢?
对于一般的情况,需求是最小化

已知x![]() 是使得上式最小的结果,且满足约束
是使得上式最小的结果,且满足约束 ![]()


其中后项

用上文推导出的KKT矩阵
可以得出
将③代入②
![]()
![]()
![]()
又因为![]() 和
和![]() 都满足约束条件
都满足约束条件 ![]() ,即
,即![]()
因此可以得到
将④代回①中:

因此

显然满足于一开始提到的满足条件:
![]() 满足于
满足于 ![]() 并且对任何满足于
并且对任何满足于 ![]() 的n维向量x都满足
的n维向量x都满足![]()
因此![]() 是解决问题的最终结果。
是解决问题的最终结果。
参考资料
[1] Stanford Online. Constrained least squares https://youtu.be/vOFsja_YmJc

















 2002
2002

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









