







---------------------------------------------------------------------------------------------------------------------------------
声明 ①极简
②可能有误
③持续更新中
---------------------------------------------------------------------------------------------------------------------------------
目录
一、计系
1.1、计的发展
纸条编程,有孔-0,无孔-1
计系=硬件+软件
软件
①系统软件,管理整个计系
②应用软件,按需编的各种程序
硬件的发展
①电子管
②晶体管
③中小规模集成电路
④(超)大规模集成电路
1.2、计系的层次结构
1,硬件
硬件的基本组成
①早期冯诺依曼机的结构
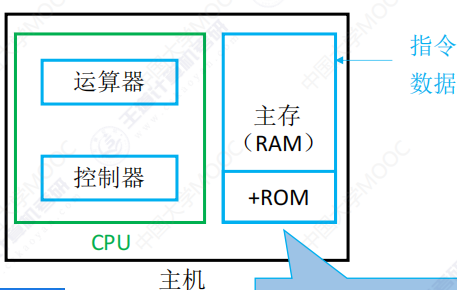
②现代计算机的结构
存储程序(冯首次提出)
将指令,以二进制代码的形式,事先输入计的主存储器,然后按其首地址,执行程序的第一条指令,然后按该程序的规定顺序,执行其他指令,直至程序结束
早期冯诺依曼机
1️⃣软件
数据+程序
2️⃣硬件①输入设备,把信息转换成,机器能识别的形式
②存储器,存数据+程序
③运算器,算术运算+逻辑运算
④控制器,指挥程序运行
⑤输出设备,把结果转换成,人熟悉的形式

计系中,软件和硬件,在逻辑上等效
冯——特点
①计算机,由五大部件组成
②指令和数据,以同等地位存于存储器,可按地址寻访
③指令和数据,用二进制表示
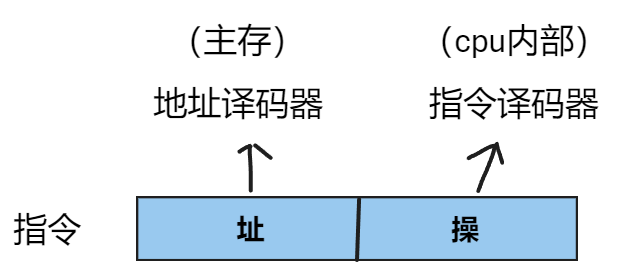
④指令,由操作码和地址码组成
⑤存储程序
⑥以运算器为中心(⇒低效)
现——特点
①以存储器为中心
②CPU=运算器+控制器


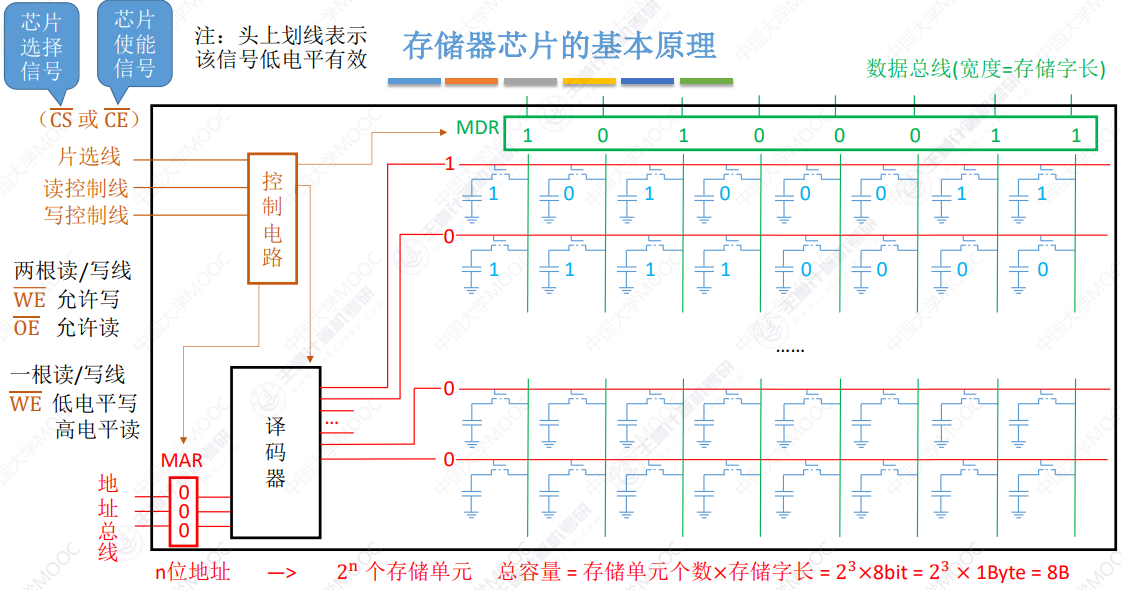
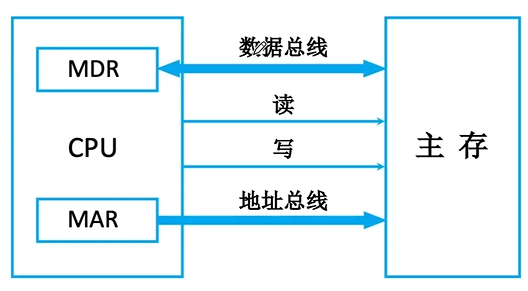
2,主存储器
存储体,按地址存数据
MAR位数=地址码长度,反映存储单元的个数
MDR位数=存储字长
··
MAR=4位⇒总共有2⁴个存储单元
MDR=16位⇒ 每个存储单元可存放16bit
1个字 (word)= 16bit
1个字节(Byte)= 8bit
1B=1个字节
1b=1个bit
存储体——内部概念
存储单元:存一串二进制代码
存储单元=多个存储元件(一元件,存1bit)(每个地址,对应一个存储单元)
存储单元中
①存储字(word):二进制代码的组合
②存储字长:二进制代码的位数
存储元:存二进制的电子元件,1存储元可存 1bit

3,运算器
运算器——功能
算术运算(+-*/)
逻辑运算(与或非)
运算器——组成
1️⃣ACC,累加器
①存操作数
②存运算结果
2️⃣MQ,乘商寄存器,*/时①存操作数
②存运算结果
3️⃣X,通用的操作数寄存器存操作数
4️⃣ALU,算术逻辑单元(最贵)通过电路,算数运算+逻辑运算

4,控制器
控制器——基本组成
①CU:控制单元,分析指令
②IR:指令寄存器,存当前指令
③PC:程序计数器,存放下一指令的地址,能自动+1
完成一条指令——步骤
①取指令 PC——取指
②分析指令 IR——取指
③执行指令 CU——执行
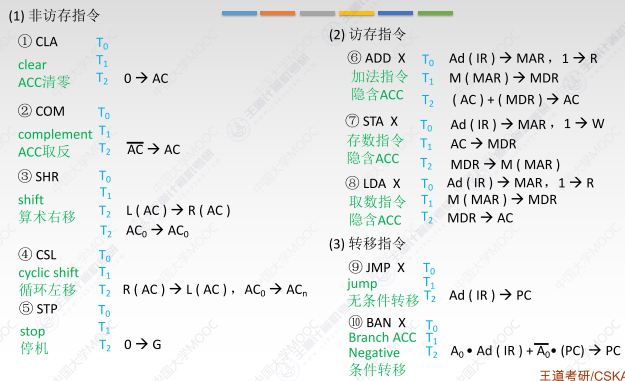
计——工作过程
必经步骤
①(PC) —> MAR
②M(MAR) —> MDR
③(MDR) —> IR
④取指令结束 (PC)+1 —> PC
⑤OP(IR) —> CU
⑥分析指令结束
可能步骤
①Ad(IR) —> MAR
②M(MAR) —> MDR
③(MDR) —> ACC
④执行指令结束

CPU区分指令和数据:指令周期的不同阶段
现在的计算机,把MAR、MDR也集成在CPU
5,计软
计软——种类
①应用软件,为了解决某问题,而编制的程序
②系统软件,管理硬件资源,并向上层应用程序提供基础服务
语言
①高级语言:C/C++、Java、Python
②汇编语言:助记符
③机器语言:二进制代码
(低语=汇语、机语)
(all程序运行前都要先—>机语程序)
高语——>机语

翻译程序
①编译器(一下全部翻译)
②汇编器
③解释器(同步翻译)
软件和硬件的逻辑功能等价,同一功能
①可用硬件实现(性能高成本高)
②可用软件实现(性能低成本低)
指令集体系结构(ISA),软件和硬件之间的界面
(低语程序员)
设计系的ISA,需要定义
①一台计,可支持哪些指令
②每条指令的作用
③每条指令的用法
(控制信号不由ISA管,而是cpu的控制单元)
6,计系
计——层次结构
软件
M4,高语机器⇒执行高语
M3,汇语机器⇒执行汇语
M2,OS机器⇒向上提供广义指令
硬件
M1,传统机器⇒执行机语指令
M0,微程序机器⇒执行微指令
计系——工作原理

1.3、计的性能指标
MAR位数,存储单元最多有多少个
MDR位数=存储字长=每个存储单元的大小

总容量=存储单元个数×存储字长 bit
总容量=存储单元个数×存储字长/8 Byte
总容量——例题
MAR=32位
MDR=8位
总容量=2^32 * 8 bit = 4GB
CPU——性能指标



CPI(更准确的说法)
一指令耗时多少个时钟T
cpu周期(机器周期)
=多个时钟T
数据通路带宽(路有多宽)
数据总线一次,所能并行传送信息的位数
吞吐量(淘宝能收多少信息)
指系统,在单位时间内处理请求的数量
响应时间
①人向计,发送1请求
②系统对该请求,做响应
③人获得结果
的等待时间
基准程序(跑分软件)
测量计处理速度的一种实用程序
数量单位


二、数据的表示和运算
2.1、数制与编码
1,无符号数
定点数,小数点的位置固定 Eg:9.007 ——常规计数
浮点数,小数点的位置不固定 Eg:9.96*10² ——科学计数法
无符号数——定义
整个机器字长的全部二进制位,all为数值位,没有符号位,=|数|
(只有无符号整数,没有无符号小数)
无符号数——范围
位数=n,范围∈[0,2ⁿ-1]
2,有符号数
真值——范围
若机器字长=n+1,真值∈[-2ⁿ, 2ⁿ - 1]
(原因,真值有+0和-0)若机器字长=n+1,真值∈[0,2ⁿ⁺¹-1](不确定对错)
真值
①+0,原码=0,0000000
②-0, 原码=1,0000000
原码
原码——定义
①符号位,0+,1-
②数值位(尾数),=|真值|
原码——写法
例1,-19
一般,[x]原 =1,0010011
机器字长未知,[x]原 =1, 10011
例2,-0.75
[x]原 = 1.1100000
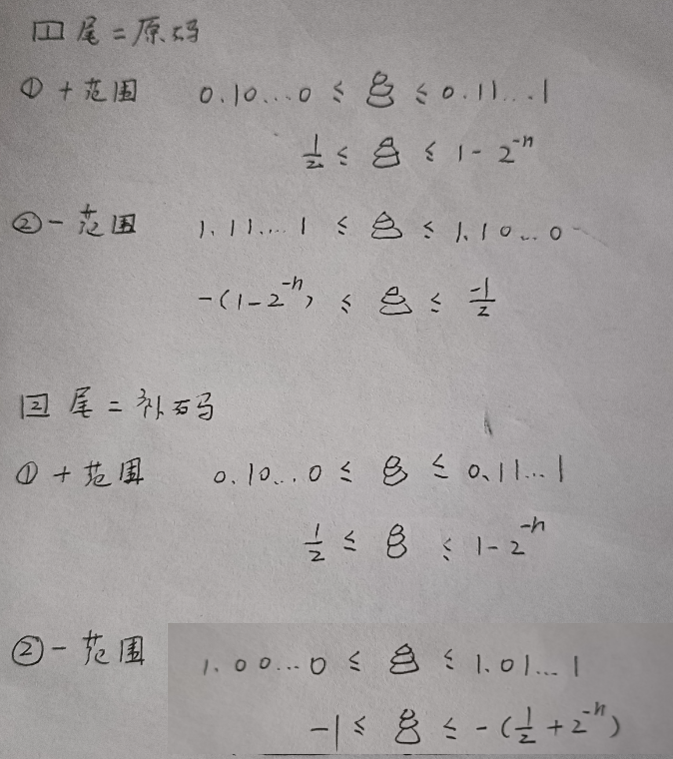
原码——范围
若机器字长=n+1
①原码整数∈[-(2ⁿ-1),2ⁿ-1]
②原码小数∈[-(1-2⁻ⁿ),1-2⁻ⁿ]
原码——缺
①符号位,不能运算
②解决①,贵
补码
补码的真值,只有一种,全0
[+0]补= [-0]补= 00000000
补码——范围
(多出一个)(机器字长=8,10000000代表-128,记住就行,自己算不出来)
若机器字长=n+1
①补码整数,∈[-2ⁿ,2ⁿ-1]
②补码小数,∈[-1,1-2⁻ⁿ]
补码——作用
减变加,省硬件成本
移码
移码——定义(只能表整数)
补码的符号位取反
[+0]移= [-0]移= 10000000
移码——范围(=补码的范围)
若机器字长=n+1
①移码整数,∈[-2ⁿ,2ⁿ-1]
②移码小数,∈[-1,1-2⁻ⁿ]
移码——作用
便于对比大小
转换
原——>反
1️⃣+
原=反
2️⃣-
数值位取反
反——>原
1️⃣+
原=反
2️⃣-
数值位取反
原——>补
1️⃣+
原=补
2️⃣-
法一,机算
①原码,数值位取反⇒反码
②反码,末位+1⇒补码
法二,手算
①找最右1
②1,左边,数值位取反
,右边,不变(没有1,就不管)
(例,原=10000000 则补=10000000)
补——>原
1️⃣+
补=原
2️⃣-
法一
①数值位取反
②末位+1
法二
①找最右1
②1,左边,数值位取反
,右边,不变
补——>-补
①符号位+数值位,都取反
②末位+1
补<——>移
符号位取反
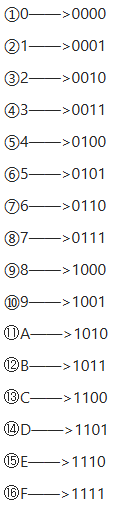
3,进制
二进制B
八进制O
十六进制H
十进制D
r进制,逢r进1(其基数=r)
基数,每个数码位所用到的不同符号的个数
二进制——最适用于计的原因
①可用两个稳定状态的物理器件表示
②0-假,1-真,便于逻辑运算
③便于逻辑门电路,实现算术运算
十六 ——> 二
十—>二
1️⃣算
①整数——除基取余
②小数——乘基取整(∞小数,二进制不能精确表示)
2️⃣拼凑法



十—>八
1️⃣直接转
①整数——除基取余
②小数——乘基取整
2️⃣十—>二—>八
①十—>二,①整数——除基取余
②小数——乘基取整
②二—>八
3️⃣十—>二—>八
①十—>二,拼凑法
②二—>八
引入BCD码——原因
①十—>二,麻烦
②快速转,一一对应
十—>8421
1️⃣手算
①十+
②十—>8421
2️⃣机算
①8241+
②若超过1010~1111(10~15),+0110(6)
映射关系
①8421
②余3码
③2421


2.2、运算方法和运算电路
0,逻辑门电路
逻辑门电路——图


异或——作用
①奇个 1,异或结果=1
②偶个 1,异或结果=0
逻辑运算——公式

逻辑运算——优先级
①非>与>或
②()优先级,更高
1,多路选择器
多路选择器——作用
①电路守门员
②多输入,just通过1个
多路选择器——图

2,三态门
三态门——作用
①电路守门员
②根据op,决定是否通过输入
三态门——图

三态门和非门——区别
三态门
①输入
②输出
③控制信号
非门
①输入
②输出
3,加法器
一位全加器
(支持1bit加法)



nbit加法器
没封装的
封装的


nbit加法器——缺
进位信息串行,计算V慢
nbit加法器——缺原因
①V=V进位产生+V传递
②位数越多,V越慢
③电信号稳态耗时,V进位产生有延迟
④串行进位/行波进位,进位信号逐级形成(多米诺骨牌)
nbit加法器——别称
①两个输入端,允许并行输入⇒并行加法器
②进位信息,串行产生⇒串行进位加法器
③综上,串行进位的并行加法器
并行进位的并行加法器
all进位信息,同时产生,几乎无延迟
nbit加法器——标志位
①OF(Overflow Flag)溢出标志
判,带符号数+-,是否溢出
OF=1,溢出
OF=0,未溢出
②SF(Sign Flag)符号标志
判,带符号数+-,结果的正负性
SF=1,=负
SF=0,=正
③ZF(Zero Flag)零标志
判,+-,结果是否为0
ZF=1,=0
ZF=0,≠0
④CF(Carry Flag)进位/借位标志
判,无符号数+-,是否溢出
CF=1,溢出
CF=0,未溢出
标志位——公式
①
最高位的进位⊕次高位的进位
②符号位
③bit 全0,ZF=1
④
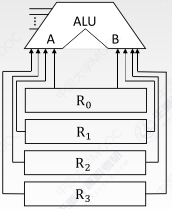
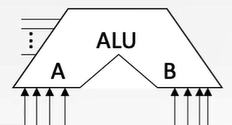
4,算术逻辑单元ALU
CPU——图

运算器——核心=ALU
ALU——核心=加法器
ALU——功能
①算术运算,+-*/
②逻辑运算,与、或、非、同或、移位
③求补码
④求直送
ALU——图

5,算术移位
注
由于原、反、补码位数有限,算术移位,不能精确等效×、÷
补充
移位不用记这么多东西,看我标蓝的
(服了哈哈哈哈哈哈哈,白看了这么多移位)
定点整数
①有符号整数,补码
②无符号整数,无符号数
定点数的移位
①算术移位,补码
②逻辑移位,无符号数
(移位运算,计不区分算术还是逻辑,由数据类型决定)

算术移位——原码
原码——移位原理
①符号位不变
②移数值位
原码——右移
①高位补0
②低位舍弃,若舍=0,等价于÷2
舍≠0,丢精度
原码——左移
①低位补0
②高位舍弃,若舍=0,等价于X2
舍≠0,大误差
算术移位——反码
正数的反码——移位=原码
+数的反码——右移
①高位补0
②低位舍弃
+数的反码——左移
①低位补0
②高位舍弃
-数的反码——右移
①高位补1
②低位舍弃
-数的反码——左移
①低位补1
②高位舍弃
算术移位——补码
+数的补码——移位=原码
+数的补码——右移
①高位补0
②低位舍弃
+数的补码——左移
①低位补0
②高位舍弃
-数的补码——右移=反
①高位补1
②低位舍弃
-数的补码——左移=原
①低位补0
②高位舍弃
6,逻辑移位
逻辑移位=无符号数的算术移位
逻辑右移
①高位补0
②低位舍
逻辑左移
①低位补0
②高位舍
逻辑移位——应用
用3B,存RGB
循环移位
带进位位CF,可留着循环移位
7,定点数的加减
原码——加
(符号位不参与运算,自己判断)
①正+正——>绝对值做加法,结果=正
②负+负——>绝对值做加法,结果=负
③正+负——>|大|—|小|,符号同|大|
④负+正——>|大|—|小|,符号同|大|
原码——减
转成加
①正-负——>正+正
②负-正——>负+负
③正-正——>正+负
④负-负——>负+正
补码——加
①真值——>原
②原——>补
③补相加(符号位参与运算)
④补——>原
补码——减
(减转加)
①真值——>原
②原——>补
③-补——>补
④补相加(符号位参与运算)
⑤补——>原
补码加减——溢出情况
①上溢,正+正=负
②下溢,负+负=正
补码加减——溢出判断
①一位符号位
V=0,无溢出
V=1,溢出
②一位符号位,看进位

V=0,无溢出
V=1,溢出
③双符号位
正数符号=00
负数符号=11
V=0,无溢出
V=1,溢出
注
双符号位补码,模4补码
(实际只存1个符号位,运算时复制1个符号位,不会增存储所需空间)
单符号位补码,模2补码
8,无符号数的加减
无符号整数——加法
①从右往左,按位加,进1
②溢出,只留n位
无符号整数——减法
①被减数不变
②减数all取反,末位+1
③加
(减转加,原因=加法电路便宜)
无符号数——加减法判溢出
1️⃣手算
超出[0,2ⁿ-1],溢出
2️⃣机算①加
最高位的进位=1,溢出
②减
(减转加)
最高位的进位=0,溢出
9,补码加减运算电路
补码加减运算电路——图
(也可用于无符号数+-)

10,原码一位乘法
原码一位乘法——元件
①ACC,存乘积高位
②MQ,存乘积、乘积低位
③X,存被乘数

原码一位乘法——方法
①先加法
②再逻辑右移
③重复n次(符号位不参与运算)
原码一位乘法——机算步骤
题目
①机器字长n+1=5
②[A]原=1.1101
③[B]原=0.1011
求A×B
步骤





原码一位乘法——手算步骤
题目
①机器字长n+1=5
②A=−0.1101
③B=+0.1011
求A×B
步骤
①
②符号位=A符⊕B符=1
③结果
真值=-0.10001111
其原码机器数=1.10001111

11,补码一位乘法
原码一位乘法——元件
①
灰,MQ中最低位
红,辅助位,初始=0
②寄存器,all统一为n+2位,⇒双符号位补码

补码一位乘法——方法
①先加法
②再算术右移
③重复n次④最后再加一次
(符号位参与运算)
加法——规则
①辅助位-MQ中最低位=1,ACC+[x]补
②辅助位-MQ中最低位=0,ACC+0
③辅助位-MQ中最低位=-1,ACC)+[-x]补
补码一位乘法——手算步骤


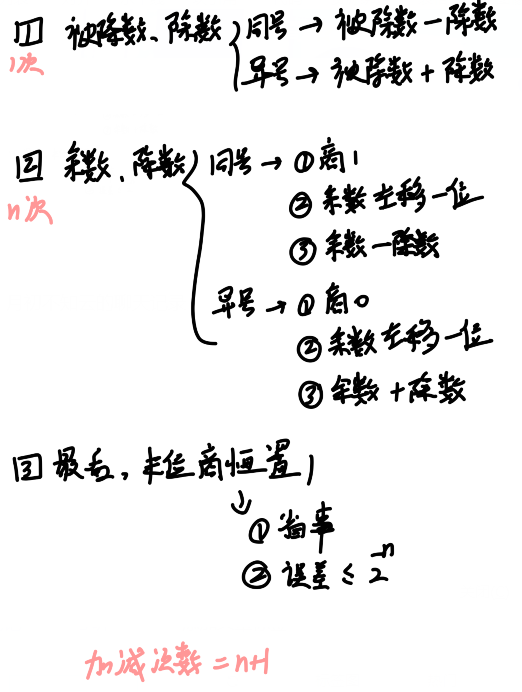
12,原码除法
题目
①机器字长n+1=5,含1位符号位
②A=0.1011
③B=0.1101
求A÷B
手算除法(二进制)——步骤

恢复余数法——机算



恢复余数法——手算规律
①不管小数点
②每确定一位商,减一次,得到4位余数
③余数末尾补0,确定下一位商
④确定5位商即可停止(机器字长为5位)
恢复余数法——手算
①写
|A|=0.1011
|B|=0.1101
[|B|]补=0.1101
[−|B|]补=1.0011
②

加减交替法(不恢复余数法)——手算

恢、加——区别
恢
①余数=负,商0
②余数+除数(恢复)
③左移
④余数-除数
加
①余数=负,商0
②左移
③+除数
①余数=正,商1
②左移
③余数-除数
注
加减交替法,余数的正负=商,商也是⊕
加减交替法——计算次数
一般
①加/减n+1次,每次加减确定一位商
②左移n次
最终,若余数=负,商0,并+[|B|]补,得到正余数
①加/减n+2次
②左移n次
13,补码除法
补码——加减交替法
对比原码——加减交替法
补
①符号位参与运算
②双符号位
③数据
A补
B补
(-B)补
补码——加减交替法步骤
14,扩展
零扩展
用0扩展高位
(适用无符号整数)
符号扩展
用符号位扩展高位
(适用有符号整数)
C语言中定点整数
int、short、long,用补码存
强制类型转换
①int—>unsigned int
数据内容不变
解释方式不变
②int—>short
截高位,留低位
③short—>int
符号扩展
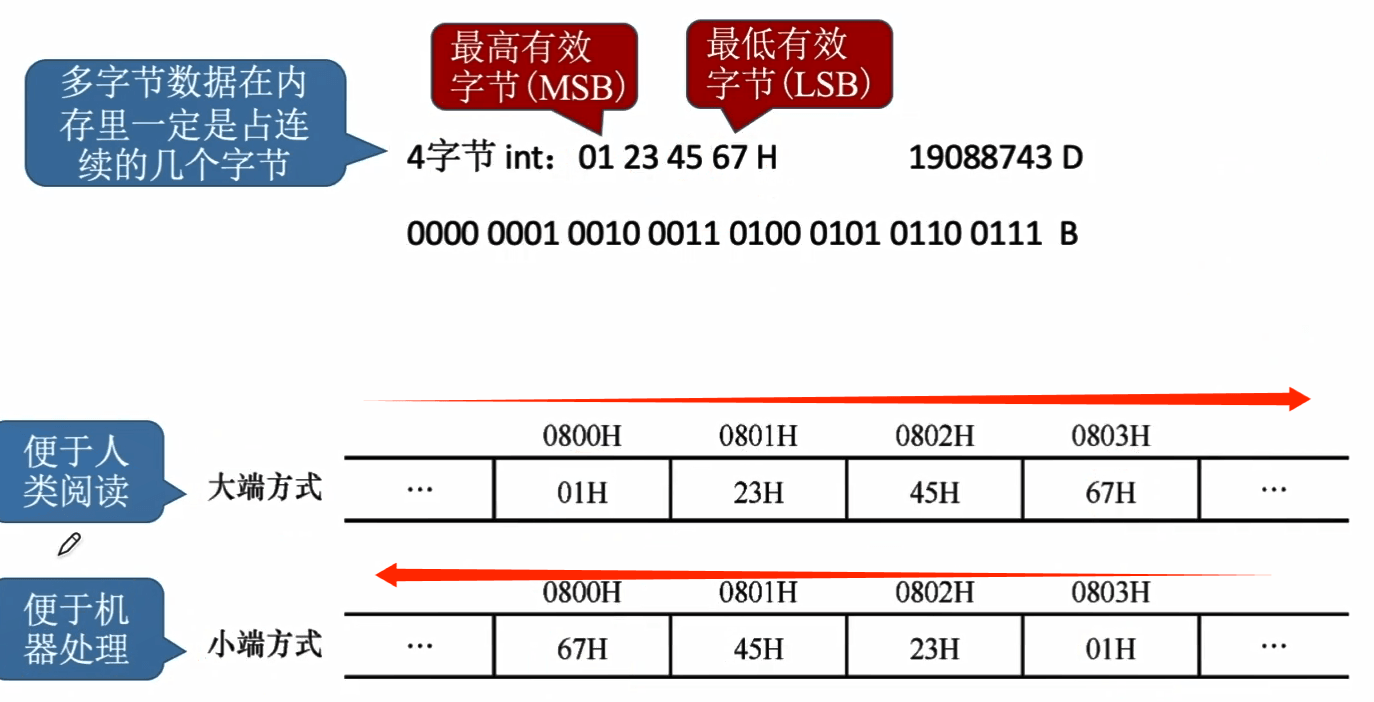
大小端模式
多字节数据在内存,占连续字节
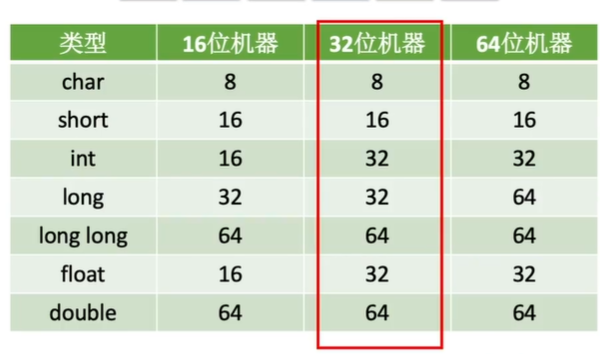
15,数据的存储和排列
现代计算机按字节编址,每个字节对应一个地址
16位系统,1字=2B
32位系统,1字=4B
64位系统,1字=8B
char,1B
short,2B
int,4Bfloat,4B
边界对齐——图
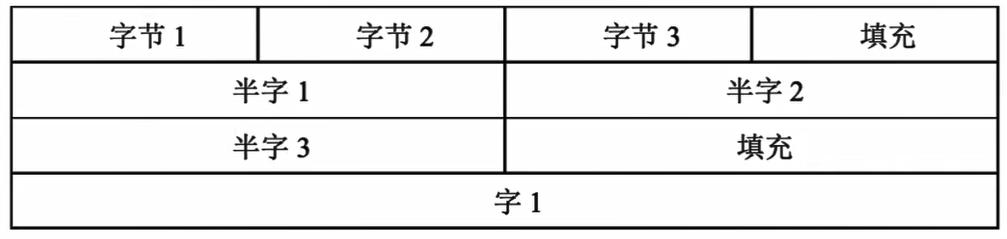
边界不对齐——图
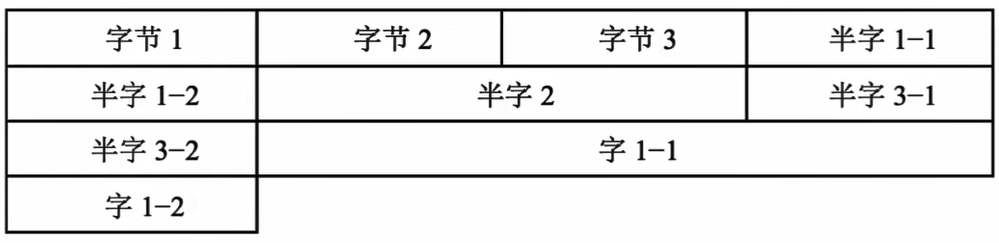
边界对齐,访存=1次,浪费空间
边界不对齐,访存=2次,不浪费空间(访存,以字或者B为单位)
2.3、浮点数
1,浮点数的表示

阶码
①数值大小(浮点数的范围)
②补/移码表示的定点整数
尾数
①精度
②原/补码表示的定点小数
浮点数——尾数规格化
尾数的最高数值位是有效值(≠0)
左规,尾数算术左移一位,阶码-1
右规,尾数算术右移一位,阶码+1
双符号位
溢出时可挽救,更高的符号位是对的符号位
规格化的原码尾数,最高数值位=1
规格化的补码尾数,符号位和最高数值位相反
浮点数——范围
2,IEEE 754
移码只能表示整数,可用来表示阶码
移码=真值+偏置值
偏置值一般取2ⁿ⁻¹,也可取其他值
此时,移码=补码符号位取反
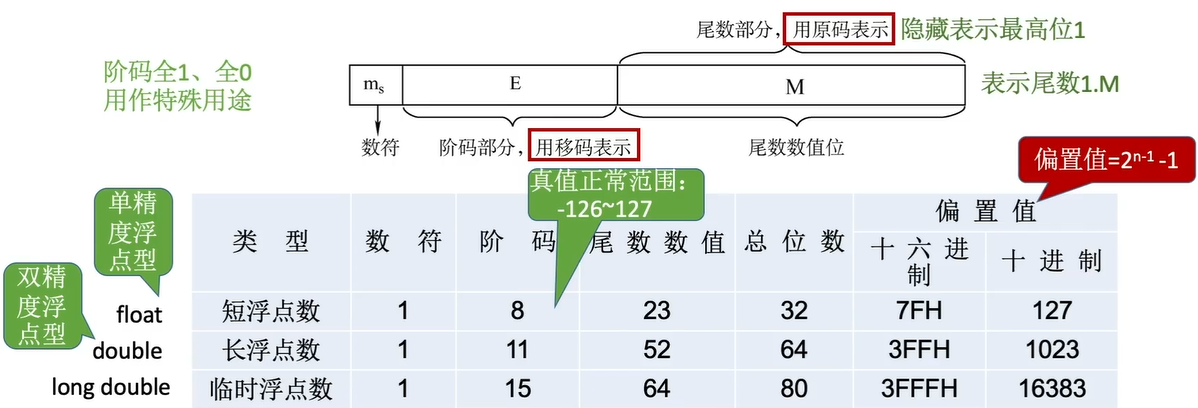
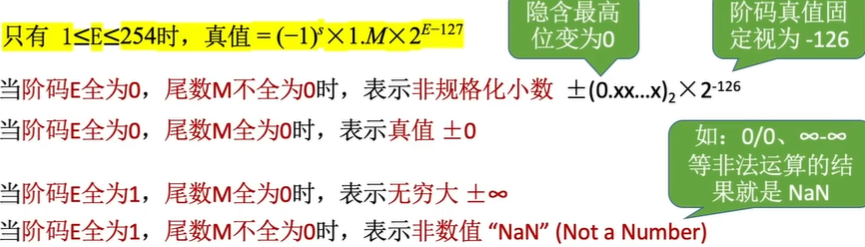
阶码全0、全1——用途
3,浮点数的加减
浮点数加减——步骤
1️⃣对阶
求阶差—>对阶,小向大靠齐,小的尾数每右移一位,阶码+1
2️⃣尾数加减
3️⃣规格化
4️⃣舍入
①0 舍 1
末位删 1,尾数 + 1
末位删 0,不管
②恒置 1
末位删啥,末位最后都 = 1
5️⃣判溢出(阶码+1,符号一样,无溢出)
①阶码上溢,抛出异常
②阶码下溢,按机器 0 处理
强制类型转换
一般考32位
int
①表整数
②范围 [-2³¹,2³¹-1]
float
①表整数、小数
②范围 ±[2⁻¹²⁶,2¹²⁷ ×(2−2⁻²³)]
转换——损失
范围、精度从小到大,转换无损失
①char —> int —> long —> double
②float —> doubleint—>float,损精度
float—>int
①float>int 时,溢出
②float 表小数时,损精度
三、存储系统
3.1、存储器
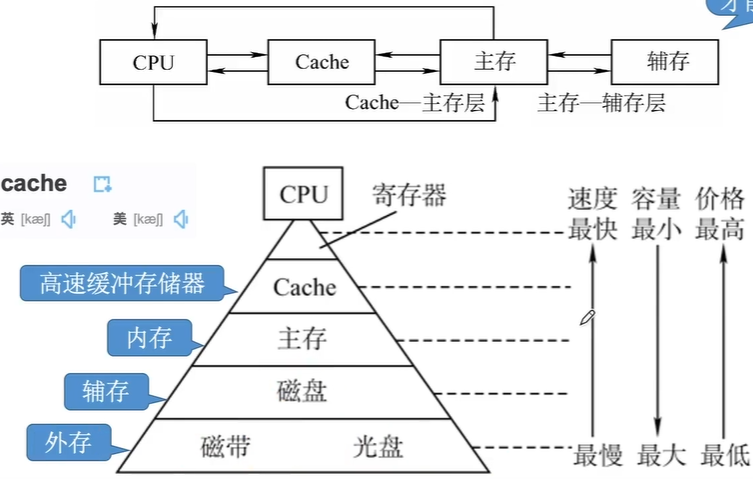
1,层次化结构
主存<——>辅存,硬件+OS实现——>虚存
Cache<——>主存,硬件自动完成——>解决主存与cpu速度不匹配
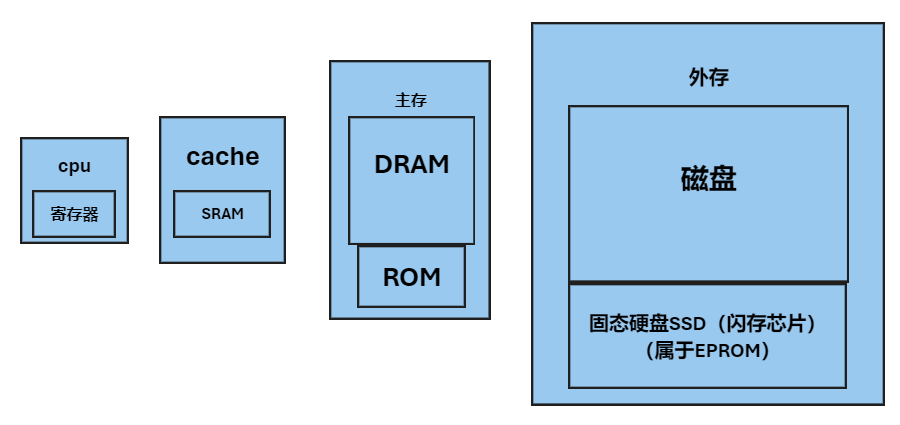
2,分类
1️⃣存储介质
①半导体存储器(主存、Cache)
②磁表面存储器(磁盘、磁带)
③光存储器
2️⃣存取方式
①随机存取存储器(RandomAccess Memory,RAM):读写任一单元,时间一样
②顺序存取存储器(Sequential Access Memory,SAM):读写一单元,时间取决于物理位置
③直接存取存储器(Direct AccessMemory,DAM):可随机存取、顺序存取。先选区,再按顺序存取
(SAM和DAM,统称为串行访问存储器:读写某单元,时间与物理位置有关)
3️⃣信息的可更改性
①读写存储器(Read/Write Memory):读、写(磁盘、内存、Cache)
②只读存储器(Read Only Memory):读(实专 CD-ROM,电影光碟,BIOS 写在 ROM 中)
4️⃣信息的可保存性
①易失性存储器(主存、Cache):断电后,信息没了
②非易失性存储器(磁盘、光盘):断电后,信息没了破坏性读出(如DRAM芯片,读出后重写):信息读出后,被破坏
非破坏性读出(如SRAM芯片、磁盘、光盘):信息读出后,不破坏
3,性能指标
①存储容量:存储字数×字长
②单位成本:每位价格=总成本/总容量
③存储速度:数据传输率(主存带宽,每秒从主存进出信息的最大数量)=数据的宽度/存储周期 (存储字长=数据的宽度)
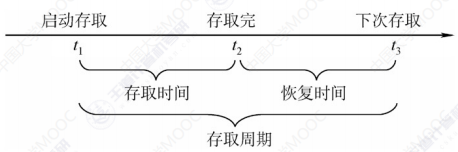
存储周期
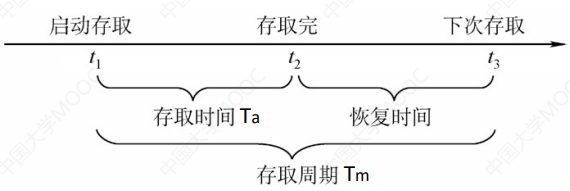
① 存取时间(Ta):从启动一次存储器操作,到完成的时间
=读出时间+写入时间
② 存取周期(Tm):(读写/访问周期)
存储器进行一次完整的读写操作,所需时间
即连续两次独立地访问存储器操作(读或写操作)之间所需的最小时间间隔
3.2、主存
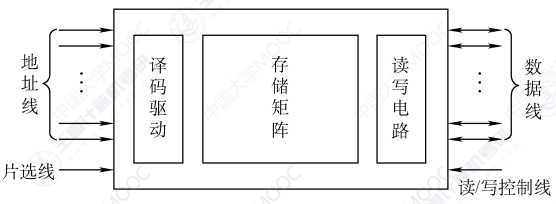
1,基本组成
MOS管,一种电控开关,输入电压达到某个阈值时,MOS管就可以接通
充电1,写数据
放电0,读出数据
cpu通过数据总线,从MDR中取数据
多个存储单元,构成存储体/矩阵
存储字/单元的长度(存储字长),取决于存储体
每根线对应一金属引脚
(还有供电引脚、接地引脚)
2,SRAM和DRAM
SRAM(Static Semiconductor Memory)(静态半导体存储器)
DRAM(Dynamic Semiconductor Memory)(动态半导体存储器)
集成度,DRAM>SRAM
对比图
SRAM,用双稳态电路的两个稳定状态,存0和1
DRAM,用电容暂存信息,无电荷-0,有电荷-1

注
地址复用,地址引脚减半,数据引脚不变
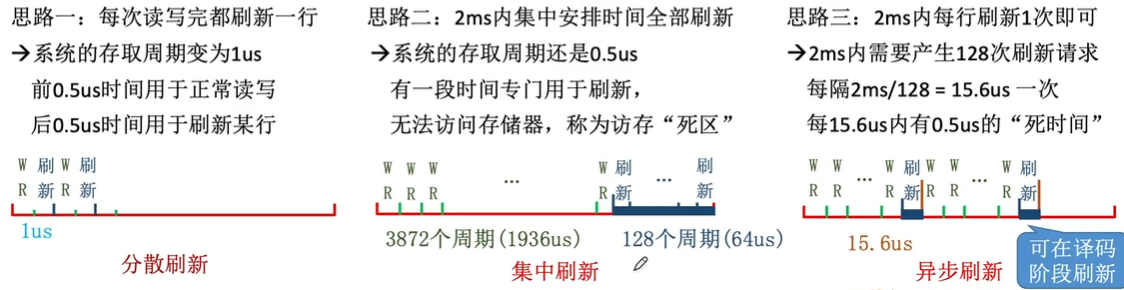
DRAM——刷新
刷新,定期对DRAM的电容充电
①刷新周期=2ms
②以行为单位,每次刷新一行存储单元
③行列地址,可↓选通线的量
④有硬件支持,不需 cpu 控制
⑤读出一行的信息后重新写入,占用 1 个读/写周期(存取/储周期)
传统DRAM与cpu,异步交换数据
刷新——方法
设DRAM排列成128×128,读/写周期=0.5us
行、列地址分两次送,可使地址线更少,芯片引脚更少
3,ROM
RAM——易失性,断电后数据消失
ROM——非易失性,断电后数据不会丢失
分类
1️⃣MROM(Mask Read-Only Memory)(掩模式只读存储器)
不可重写,只能读
可靠性高、灵活性差、生产周期长、只适合批量定制
2️⃣PROM(Programmable Read-Only Memory)(可编程只读存储器)
用专门的PROM写入器,写入信息,写一次后不可改
3️⃣EPROM(Erasable Programmable Read-Only Memory)(可擦除可编程只读存储器)
①紫外线,擦
②写次数有限
③擦复杂
4️⃣UVEPROM(ultraviolet rays)
紫外线照8~20分钟,擦除all信息
5️⃣EEPROM(E2PROM)(电可擦除可编程只读存储器)(第一个E是Electrically)
电擦除,擦除特定的字①电信号,擦
②更多次的写
③可随时改(速度,EEPROM>EPROM)
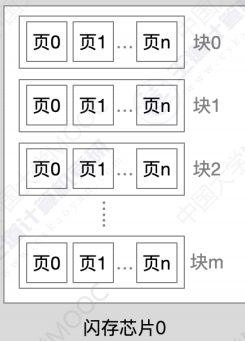
6️⃣Flash Memory(闪速存储器)
①U盘、SD 卡
②每个存储元只需单个 MOS 管,位密度>RAM
③以 EEPROM 为基础,断电后也能保存信息
④可多次快速擦除重写
⑤先擦除,再写入⇒速度,写<读
7️⃣SSD(Solid State Drives)(固态硬盘)
①=控制单元+存储单元(Flash)
②与闪速的区别=控制单元不一样,存储介质类似
③可多次快速擦除重写
④速度快、功耗低、价格高
⑤PC 用 SSD 取代机械硬盘
⑥手机辅存里面的 Flash,比 SSD 的 Flash 集成度高、功耗低、价格贵
注
①很多 ROM 可写,很麻烦
②闪存写入前,要先擦除
③ROM 也有随机存取
④RAM 和 ROM 不是完全对立
cpu,到主存中取指令,再执行指令
内存条,就是主存
BIOS芯片(ROM),存了自举装入程序,负责引导装入OS(开机)
4,多模块存储器
双端口RAM,408统考已删,有的自命题可能考
存取周期,可连续读写的最短时间间隔
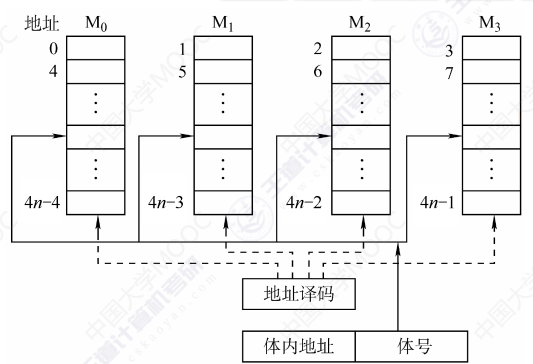
多体并行存储器
各模块
①容量、存取速度相同
②有独立的读写控制电路、地址寄存器、数据寄存器
单体多字存储器
①各存储单元存 m 个字
②总线宽度=m
③一次并行读出 m 个字,不能单独取其中某个字
④指令和数据在主存内,必须连续
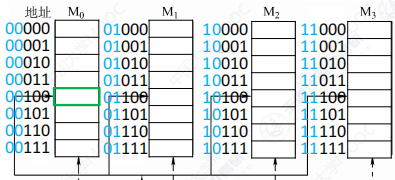
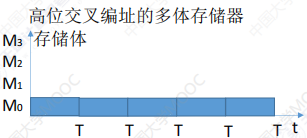
高位交叉编址
低位交叉编址
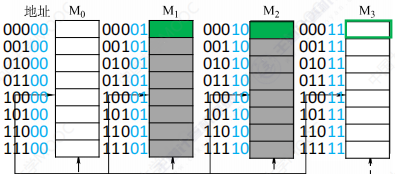
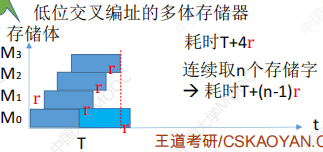
存取周期=T
存取时间(总线传输周期)=r
模块数=m
为了流水线不间断,模块数m≥T/r(m=T/r,性能最好)
流水线的方式并行存取
①宏观上并行
②微观上串行
给定地址X,求它属于第几个存储体
①看体号
②x%存储体个数
3.3、主存与CPU的连接
现代计算机
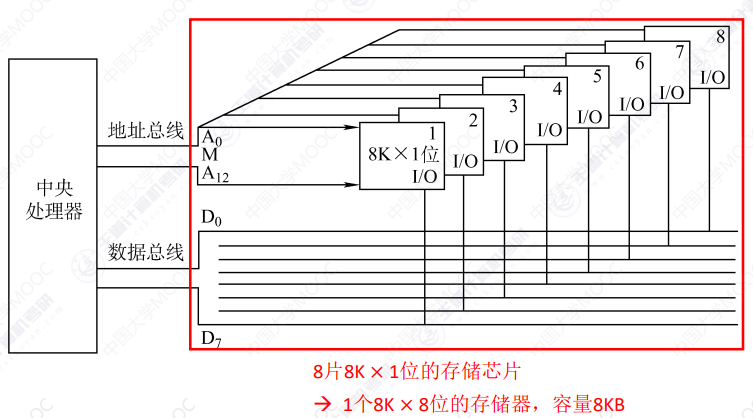
存储器芯片——输入输出信号

↑ 主存的存储字长
1️⃣位扩展
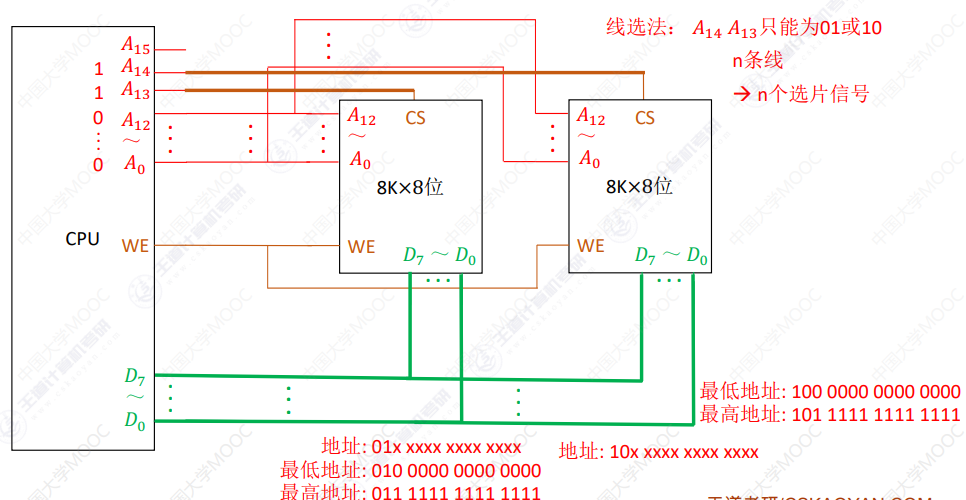
2️⃣字扩展
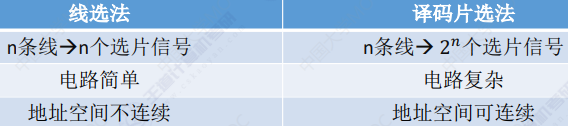
①线选法
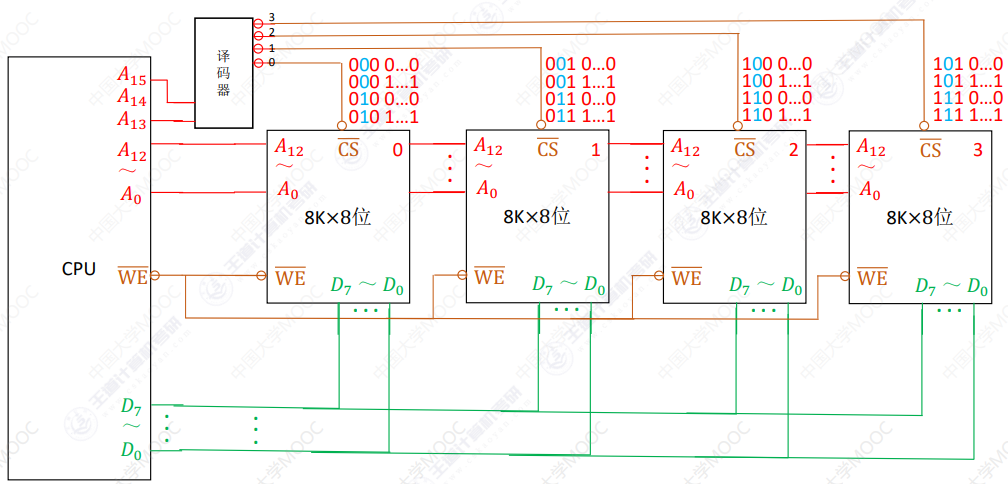
②译码器片选法
3️⃣字位同时扩展
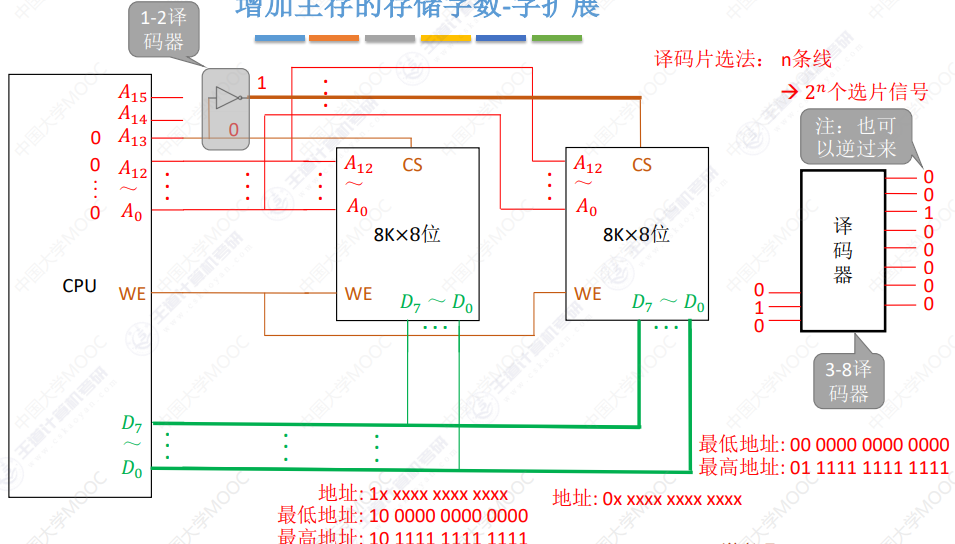
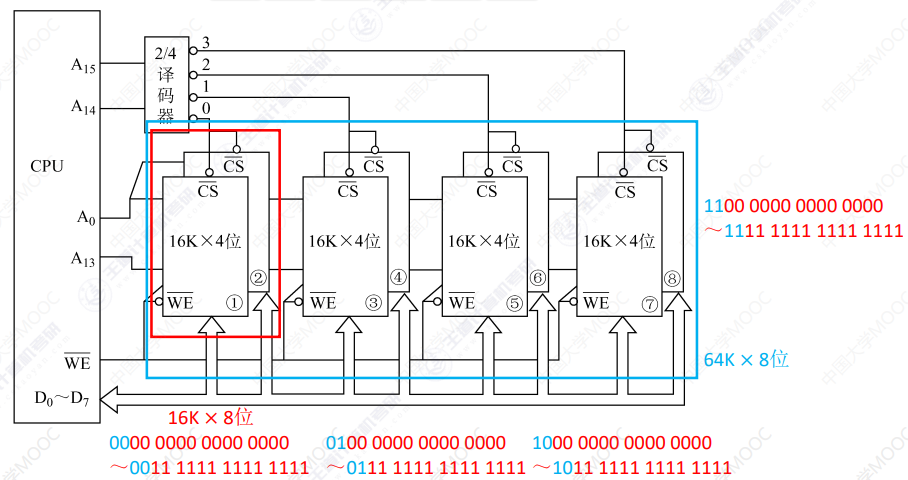
译码器的使能端
CPU,可控制片选信号的生效时间
3.4、外存
1,磁表面存储器
磁表面存储器
优
①容量大,便宜
②记录介质,可重复使用
③信息可长期保存,甚至脱机存档
④非破坏性读出
缺
①存取速度慢
②复杂
③环境要求高
2,磁盘(机械硬盘)
磁盘——组成
1️⃣存储区域
①一硬盘,有多个记录面
②每个记录面,划为多条磁道
③每条磁道,划为多个扇区
④扇区(块),是磁盘读写的最小单位,即磁盘按块存取
磁头数(Heads)(记录面数)
①硬盘,有多少个磁头
②磁头,用于读取/写入记录面的信息
③一面,对应一磁头
柱面数(Cylinders)
①一面上,有几条磁道
②磁道垂直看下去,构成一个圆柱面
扇区数(Sectors)
每一条磁道上,有几个扇区
计算
磁盘的平均等待时间=max(转一圈)+min(不转)=转半圈
2️⃣硬盘存储器
硬盘存储器=磁盘驱动器+磁盘控制器+盘片
磁盘驱动器
①核心=磁头+盘片
②温彻斯特盘,可移动头固定盘片的硬盘存储器
磁盘控制器
①是硬盘存储器和主机的接口
②主流标准=IDE、SCSI、SATA
磁盘——性能指标
1️⃣容量, 一磁盘能存的字节总数
①非格式化容量,all 用了
②格式化容量,保留一部分以备份
(非格式化>格式化)
2️⃣记录密度,指盘片单位面积上记录的二进制的信息量
道密度,沿半径单位长度,有几个磁道
位密度,磁道单位长度上,能记录的位数
面密度=位密度*道密度
(同一扇区的磁道,存的位数一样)
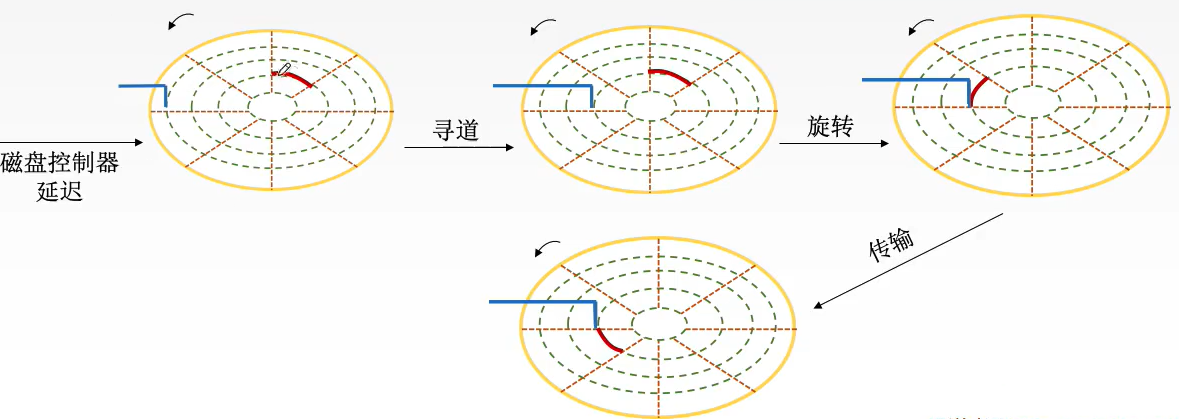
3️⃣平均存取时间
①磁盘控制器延迟
②寻道
③旋转延迟(一般转半圈)
④传输
4️⃣数据传输率
①磁盘,在单位时间内,向主机传送数据的字节数
②设磁盘转数=r(转/秒),每条磁道容量=N 个字节,则数据传输率=rN
磁盘——地址
磁盘——工作过程
①硬盘的主要操作=寻址、读盘、写盘
②每个操作,对应一个控制字
③读写操作,串行
工作过程
①取控制字
②执行控制字
3,磁盘阵列
磁盘阵列——定义
RAID( Redundant Array of Inexpensive Disks,廉价冗余磁盘阵列)
①将多个磁盘,组成一个独立的逻辑盘
②数据,在多个物理盘上分割交叉存储、并行访问
③存储性能好、可靠、安全
磁盘阵列——分类
越往下越安全
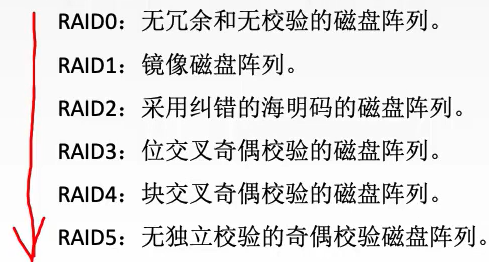
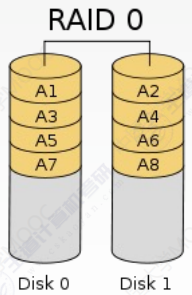
RAID0
逻辑上相邻的两个扇区,在物理上存到两个磁盘
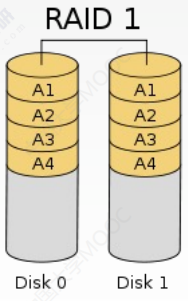
RAID1
很粗暴,存两份数据,浪费一半的空间
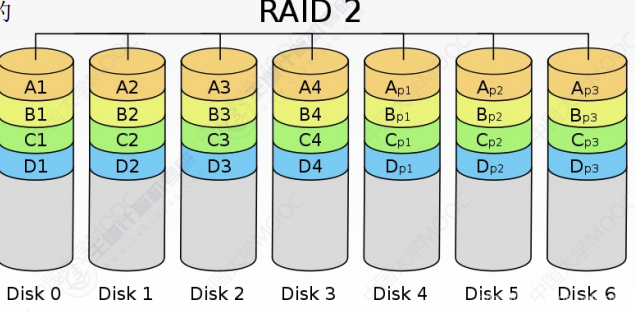
RAID2
①逻辑上连续的几个 bit,物理上分散在各个盘
②4bit 信息位+3bit 海明校验位,可纠正一位错
4,固态硬盘SSD
原理
基于闪存,属于电可擦除ROM(EEPROM)
组成
①闪存翻译层,逻辑块号—>页
②存储介质
闪存内部 ——>
读写特性
①以页为单位读写
②以块为单位擦除,擦干净的块,里面的页可写1次,读∞次
③随机访问,逻—>物,电路迅速定位
④读快,写慢
⑤若一页中有数据,先复制到别的新块,再擦整块,再写
对比机械硬盘
①SSD 读写快,机械硬盘有延迟
②SSD 安静、耐造、能耗低、贵
③SSD 的一块,被擦多了会坏,机械硬盘的扇区不会坏
磨损均衡技术
①擦除平均分布到各个块,提升寿命
②动态磨损均衡,写时,选累计擦除次数少的块
③静态磨损均衡,SSD 监测,让老块读,让新块写
3.5、高速缓冲存储器
1,Cache的原理
局部性原理
空间局部性,周围的,可能下次要用(数组)
时间局部性,现在用的,可能下次要用(循环)
局部性原理——怎么确定周围的
将主存分块,主存与Cache之间,以块为单位,进行数据交换
主存,块=页=页面=页框
Cache,块=行
主存——地址

命中率H,CPU欲访问的信息已在Cache中的比率
未命中率(缺失率),M = 1 - H
Cache—主存系统的平均访问时间t
设
tc,访一次Cache的时间
tm,访一次主存的时间
则
①先访 Cache,Cache 未命中再访主存,t=H*tc +(1-H)(tc + tm)
②同时访 Cache 和主存,若 Cache 命中停访主存,t=H*tc +(1-H)tm
每次被访的主存块,一定被立即调入Cache
2,Cache和主存的映射方式
设
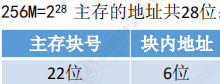
①主存大小=256MB,按字节编址
②Cache 行=8,行长为 64B
1️⃣全相联映射(随意放)
主存块,可放在Cache的任意位置
优
cache空间利用充分,命中率高缺
找标记慢,可能会对比all行的标记
全相联映射——访存过程
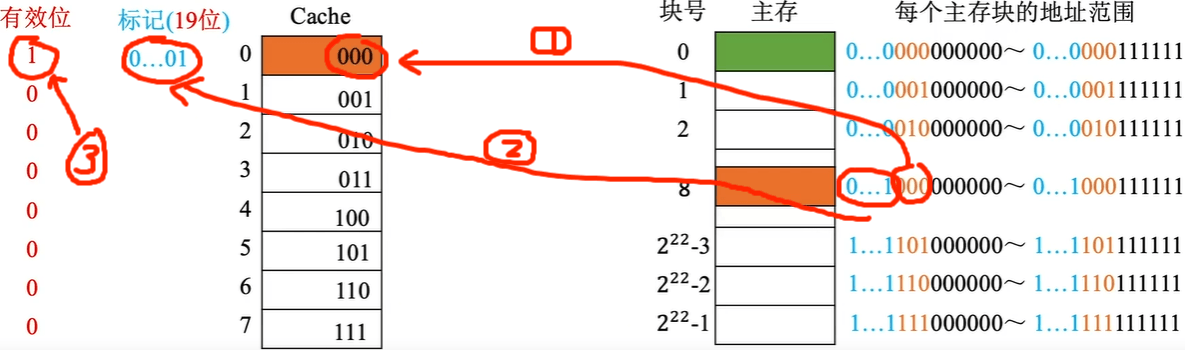
①主存块号,对比Cache的标记
②块号=标记
有效位=1,则Cache命中
③未命中
或有效位=0,则访主存
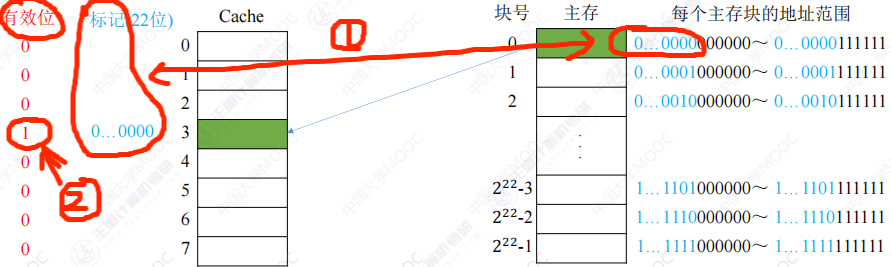
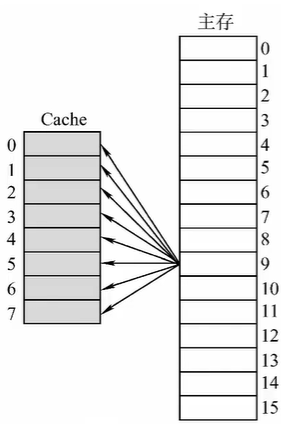
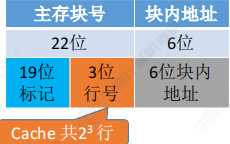
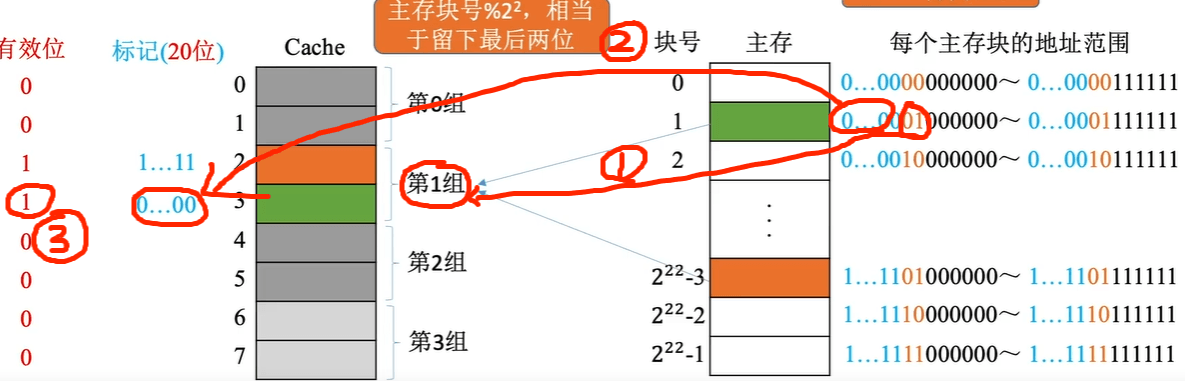
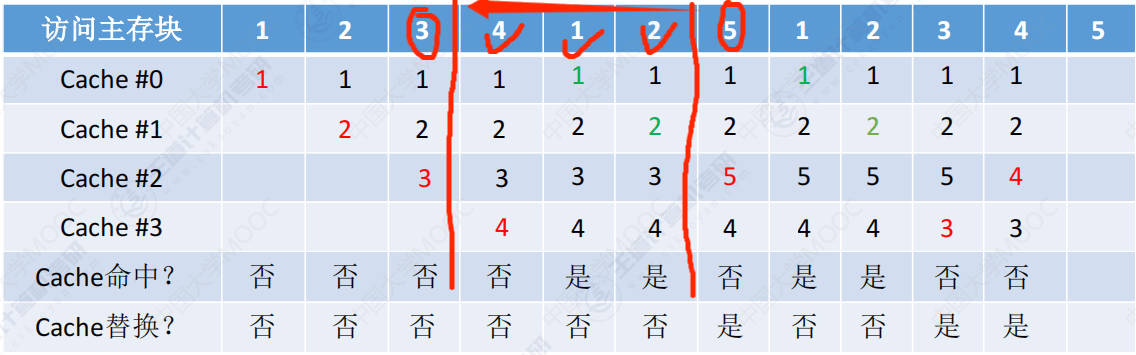
2️⃣直接映射(固定位置)
①每个主存块,只能放到一特定位置
②Cache 块号=主存块号 % Cache 总块数
优
对任一地址,只用对比标记,速度最快缺
cache空间利用不充分,命中率低
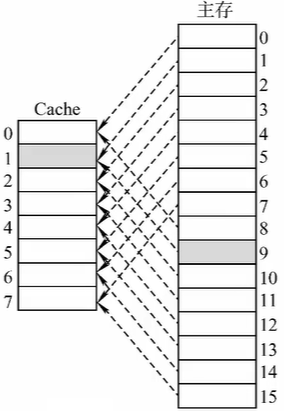
直接映射——访存过程
①用块号的后3位,确定Cache行
②块号的前19位=标记
有效位=1, 则Cache命中
③未命中
或有效位=0,则访主存
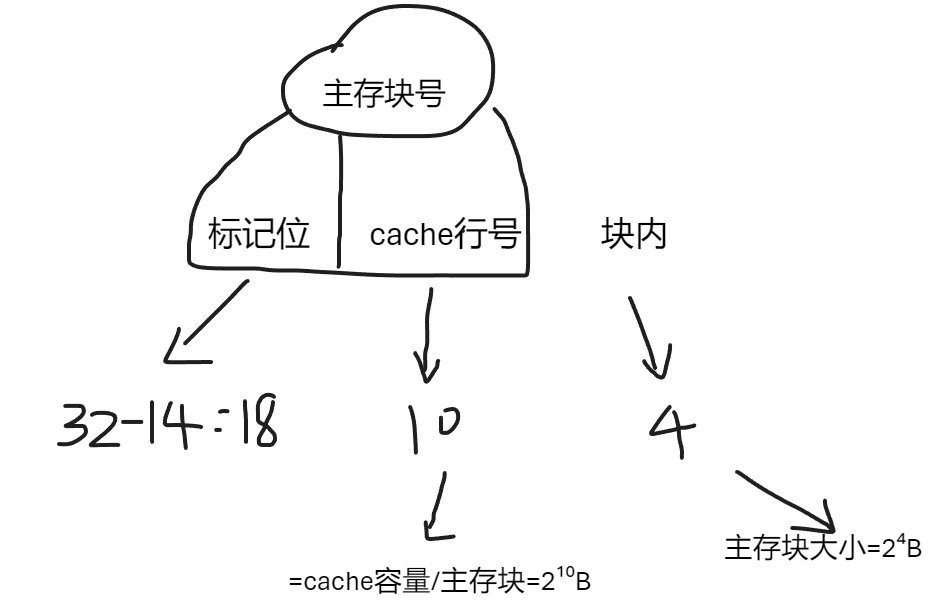
直接映射——例题(王道计组课本p144第17题)
主存地址=32位,按字节编址
主存块=16B,一字=4B,用写回法
则能4K字的cache的总容量的位数≥
cache的总容量,包括存储容量和标记阵列(有效位、标记位、一致性维护位、替换算法位)
(有效位、标记位一定存在)
该题中的标记阵列=有效位1、一致性维护位1
因此每个cahce标记项=18+1+1=20位
标记阵列容量=2¹⁰x20位=20K位
存储容量=4Kx32位=128K位
总容量=128K+20K=148K位
3️⃣n路组相联映射(特定分组)(每n个cache行为一组)
①Cache 块,分为多个组,每个主存块,可放到分组中的任一位置
②组号=主存块号 % 分组数
优
折中,综合效果好

组相联映射——访存过程
①用块号的后2位,确定所属分组号
②块号的前20位=标记
有效位=1, 则Cache命中
③未命中
或有效位=0,则访主存

3,Cache替换算法
抖动
频繁的换入换出,刚被换的块马上又被调入
1️⃣随机算法(RAND, Random)
若Cache已满,随机选一块替换
优
简单
缺
①没考虑局部性原理
②命中率低
③效果不稳定
2️⃣先进先出算法(FIFO, First In First Out)
若Cache已满,换最先被调入Cache的块
优
简单
缺
①没考虑局部性原理
②最先被调入 Cache 的块,可能频繁访
3️⃣近期最少使用算法(LRU, Least Recently Used )
为每个Cache块,设一计数器,记录它多久没访。Cache满后,换计数器max的
手算
机算
①命中时,设命中行的计数器=A,比A小的计数器+1,A=0
②未命中且有空闲行,新装入行的计数器=0,其余非空闲行全+1
③未命中且无空闲行,计数值max的行淘汰,新装行的计数器=0,其余全+1
(Cache块=2ⁿ,则计数器只需n位。且Cache装满后,所有计数器的值一定不重复)
优
①基于局部性原理,淘汰最久没访,合理
②效果优秀,Cache 命中率高
缺
若频繁访的主存块个数 > Cache行,可能抖动
4️⃣最不经常使用算法(LFU, Least Frequently Used )
为每个Cache块,设一计数器,记录它访过几次。Cache满后,换计数器min的
机算
①新块的计数器=0,之后每访问一次,计数器+1
②需替换时,选计数器 min 的
计数器min行,若有多个,选
①按行号递增
②或 FIFO
缺
①曾经常访的主存块,未来不一定用,未很好遵循局部性原理
②效果不如 LRU
4,Cache写策略
写命中
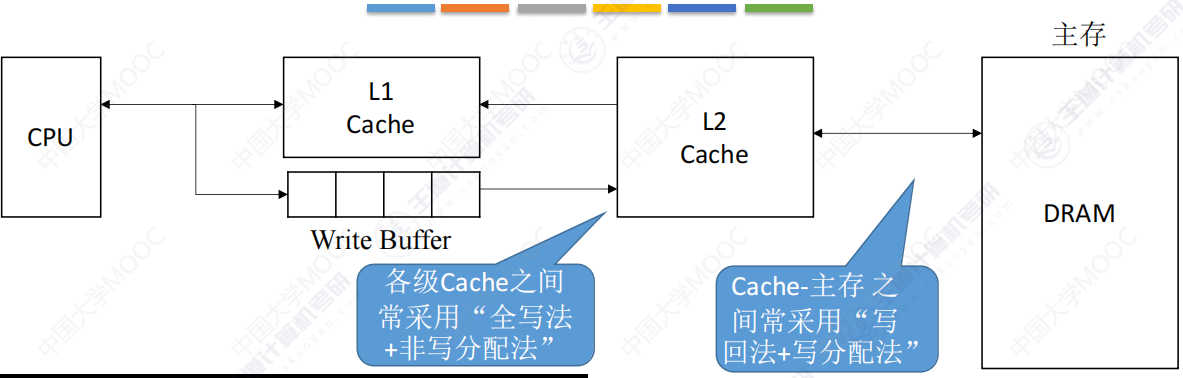
1️⃣写回法(write-back)
写命中时,只改Cache,当此cache块被换出时,才写回主存优
访存次数↓
缺
可能数据不一致
2️⃣全写法(写直通法,write-through)
写命中时,把数据同时写入Cache和主存,用写缓冲实现优
保证数据一致
缺
①访存次数↑
②速度慢
写缓冲(write buffer)
因为CPU写很快
①若写不频繁,效果就好
②若写频繁,写缓冲饱和,会阻塞
写不命中
1️⃣写分配法(write-allocate)
写不命中时,把主存块调入Cache,在Cache中改(搭配写回法)
2️⃣非写分配法(not-write-allocate)
写不命中时,只写入主存(搭配全写法使用)
(读未命中,才调入cache)
多级Cache
离CPU越近,速度快,容量小
远, 慢, 大
3.6、虚存
段页式、页式,和主存交换信息都是以页为单位
段式,更容易编译、改、保护、共享
快表,在cache,因为硬件nb,所以快
慢表,在主存,搜索算法
cache,SRAM,硬件处理,放的主存的一部分副本
快表TLB,SRAM,硬件、软件处理,放的页表page的一部分副本
四、指令系统
4.1、指令系统
1,定义
指令(机器指令)——定义
①机语的一个语句
②一组有意义的二进制代码
指令——地位
①指示计,执行某种操作的命令
②计,运行的 min 功能单位
一台计算机的所有指令的集合,构成该机的指令系统(指令集)
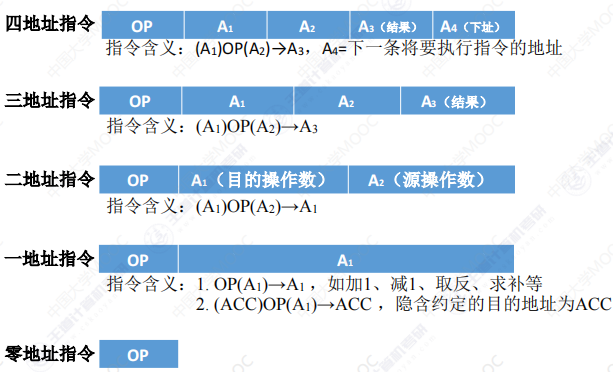
指令=操作码+地址码
2,分类——按地址码数目
指令——按地址码数目分类
单地址指令,只有1个地址码,但可能有1、2个操作数
2个操作数的情况,1个由地址码给出,1个由隐含寻址从ACC里面找
3,分类——按指令长度
指令——按指令长度分类
定长指令字结构:指令系统中,所有指令的长度都相等
变长指令字结构:指令系统中,各种指令的长度不等
指令字长(一般=字节的整数倍)
一条指令的总长度(可变)
机器字长
CPU进行一次整数运算,所能处理的位数(和ALU相关)
4,分类——按操作码长度
指令——按操作码长度分类
定长操作码
①所有指令的操作码,长度相同
②控制器的译码电路,简单
③灵活性低
(操作码=n位—>2ⁿ条指令)
可变长操作码
①各指令的操作码,长度可变
②控制器的译码电路,复杂
③灵活性高
5,分类——按操作类型
指令——按操作类型分类
1️⃣数据传送类
(1)数据传送
①LOAD,数据,主存—>寄存器
②STORE,数据,寄存器—>主存
2️⃣运算类
(2)算术逻辑操作
①算术,+-*/、求补、浮点运算
②逻辑,与、或、非、异或、位操作、位测试、位清除、位求反
(3)移位操作
3️⃣程序控制类
(4)转移操作(改变程序执行流)
①调用和返回,CALL 和 RETURN
②陷阱(Trap)指令例,循环指令、条件转移指令、子程序调用指令
4️⃣输入输出类
(5)输入输出操作
CPU寄存器,与IO端口之间的数据传送
6,扩展操作码
定长指令+可变长操作码——>扩展操作码指令格
(不同地址数的指令,用不同长度的操作码)
注
①不允许短码是长码的前缀
②各指令的操作码,不能重复
一般
①频率高的指令,操作码短
②频率低的指令,操作码长
↓指令译码+分析的时间
设地址长度=n,上一层留出m种状态,下一层可扩展出m×2!种状态
定长操作码
优
①简化硬
②指令译码和识别速度
缺
指令数↑ ,操作码占更多位,地址码位数受限
扩展操作码(不定长操作码)
优
在指令字长有限的前提下,可保持多种指令种类
缺
①指令译码和分析的难度
②控制器的设计,复杂
4.2、指令的寻址方式
1,指令寻址
PC的值=下条指令的地址
(PC放指令地址,指令的地址段放操作数地址)
①顺序寻址,PC + “1” —> PC
②跳跃寻址,由转移指令指出
采用不同寻址方式的目的
↓指令字长,扩大寻址空间,↑编程灵活性,但↑了指令译码的复杂度
(程序控制靠转移指令实现)
①直接转移,目标地址在指令中,执行时把地址码送入 PC
②间接转移,目标地址在寄存器、内存中
③相对转移,目标地址=PC 值+偏移量(偏移量一般在指令中)
④绝对转移,目标地址直接由指令、寄存器给出
2,数据寻址一
速度,立即寻址>寄存器寻址>直接寻址>间接寻址
位数
①PC,=存储器的字数(因为 PC 放的地址,即有多少个存储器)
②IR,=指令字长
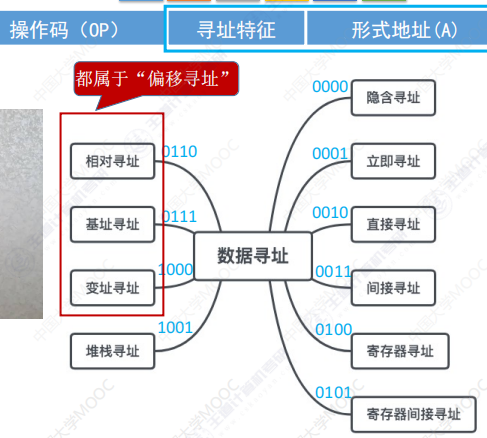
1️⃣直接寻址
形式地址A=真实地址EA,即EA=A
访存次数
取指令1
执行指令1
优
①简单
②执行指令时,仅访存一次
缺
①A 的位数,决定寻址范围
②地址不易改
2️⃣间接寻址
形式地址≠真正地址
真正地址=操作数地址的地址,即EA=(A)
访存次数
取指令1
执行指令2
优
①扩大寻址范围
②便于编程序
缺
执行指令时,多次访存
3️⃣寄存器寻址
寄存器寻址——地址构成
操作数,寄存器,偏移量
访存次数
取指令1
执行指令0
优
①执行指令时,不访存,只访寄存器
②指令字短、地址位数短、速度快,支持向量/矩阵
缺
①贵
②寄存器个数有限
4️⃣寄存器间接寻址
形式地址=寄存器Ri的地址
真正地址=Ri中的地址
访存次数
取指令1
执行指令1
特点
比间接寻址快
5️⃣隐含寻址
优,利于↓指令字长,简化地址结构
缺,需↑ 存数/隐含地址的硬件
6️⃣立即寻址
形式地址A=操作数/立即数(一般用补码)
#,表示立即寻址
访存次数
取指令1
执行指令0
优
①执行指令时,不访存
②执行指令时间 min
缺
A的位数,限制立即数的范围
3,数据寻址二
起点不同
基址寻址:程序的起始存放地址
变址寻址:人决定
相对寻址:PC所指地址
1️⃣基址寻址
BR基址寄存器——base address register
EA——effective address
BR——类型
①专用(OS/管理程序,写内容)
②通寄来代替(用户选通寄,还是OS/管理程序,写内容)
基址寻址——定义
有效地址=cpu中基址寄存器的内容+指令中的形式地址A
即EA=(BR)+A
优
①扩大寻址范围
②用户不用管程序在主存的位置,便于多道程序并发运行
③浮动程序(程序在内存里动)
OS中的重定位寄存器,就是基址寄存器
2️⃣变址寻址
变址寻址——定义
有效地址=变址寄存器的内容+指令中的形式地址A
即EA= (IX)+A
IX——类型(用户写内容)
①专用
②通寄
优,适于循环、数组
3️⃣相对寻址
相对寻址——定义
有效地址=程序计数器PC的内容+指令中的形式地址A
即EA=(PC)+A
(A是相对于PC所指地址的位移量,可正可负,补码表示)
相对寻址——求偏移量范围
地址位数=n,偏移量范围=补码范围=[-2ⁿ⁻¹,2ⁿ⁻¹-1](注意留一位当符号)
相对寻址——例题
设相对寻址的转移指令占3个字节 第一字节为操作码,第二三字节为相对位移量,低字节地址为字地址的存放方式。每取出1B时候,(pc)+1->pc
①当pc当前值为240,要求——>290,则转移指令的第二、三字节的机器代码=
②当pc当前值为240,要求——>200,则转移指令的第二、三字节的机器代码=
优
①便于程序浮动(代码在程序内部动)
②转移指令
无条件转移指令 jmp 2,不管PSW的各种标志位
条件转移指令bgt(无符号数A>B,则转移),转移条件=
因为A>B,故
①A-B 无进位、无借位,即 CF=0
②A-B≠0,即 ZF=0
4,数据寻址三
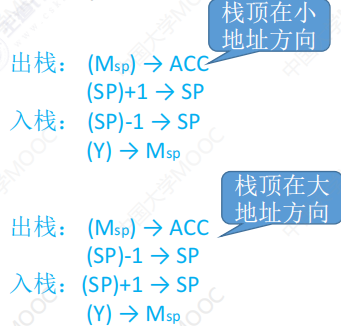
堆栈寻址——定义
操作数放在堆栈中,隐含使用堆栈指针(SP)作为操作数地址
硬堆栈,寄存器,无需访存,贵
软堆栈,主存,访存一次,便宜
堆栈,可用于函数调用时,保存当前函数的相关信息
寻址——总结
EA操作数的真实地址
A操作数的形式地址
1,直接寻址,EA=A
2,间接寻址,EA=(A)
3,寄存器寻址,EA=寄存器A
4,寄存器间接寻址,EA=寄存器A——>寄存器B
5,隐含寻址,EA=隐含在操作码中
6,立即寻址,EA=操作数/立即数
1,基址寻址,EA=(基址)+A
2,变址寻址,EA= (IX)+A
3,相对寻址,EA=(PC)+A
4,堆栈寻址,堆栈指针实现
4.3、程序的机器代码表示
1,x86汇语指令概念
指令——作用
①改变程序执行流
②处理数据
mov指令
将s,复制到d所指的位置destination不能=常数
source
内存的读写长度——表示
dword ptr——双字,32bit
word ptr——单字,16bit
byte ptr——字节,8bit
未指明,默认32bit
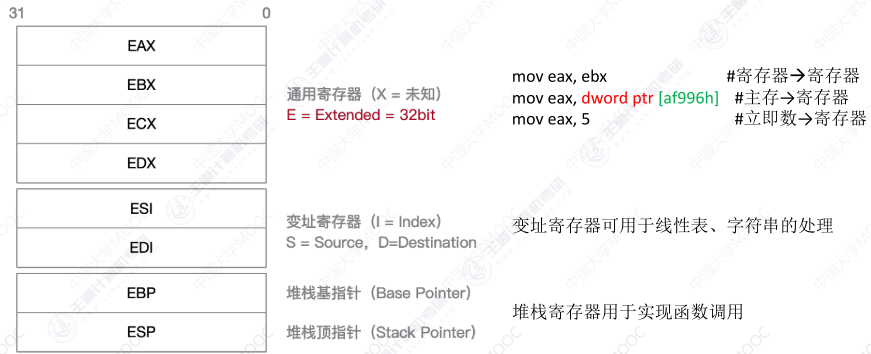
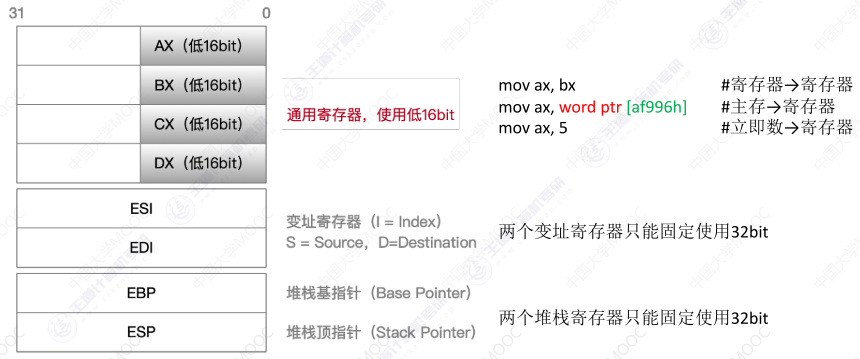
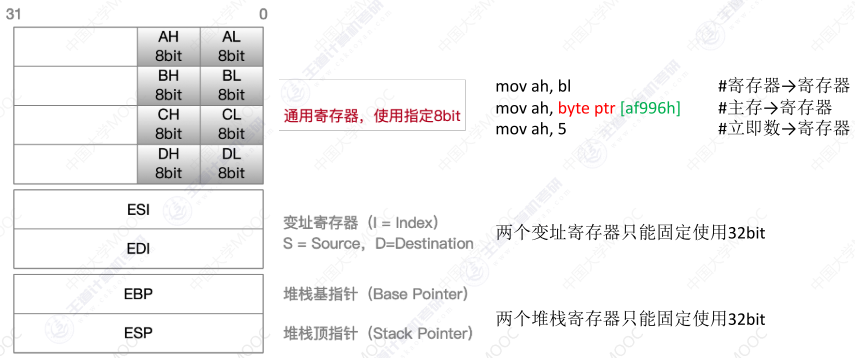
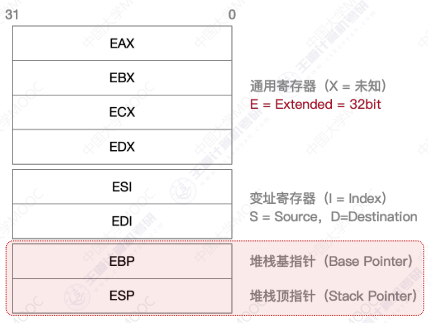
x86架构cpu——寄存器类型
2,常用x86汇编指令
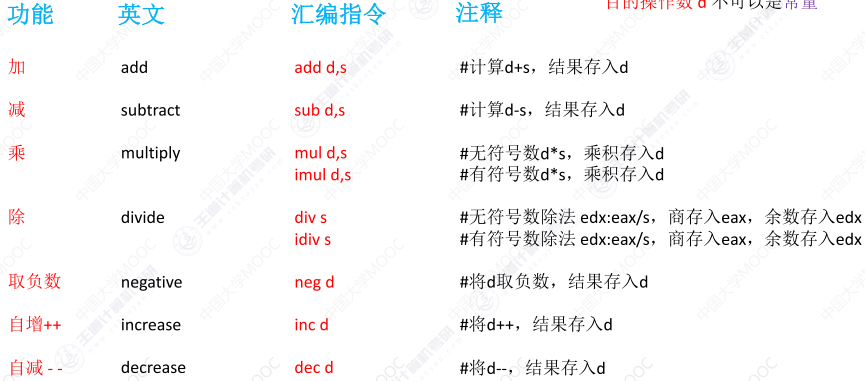
算数运算——指令

逻辑运算——指令

3,AT&T和Intel格式
AT&T,Unix、Linux的常用格式
Intel,Windows 的常用格式

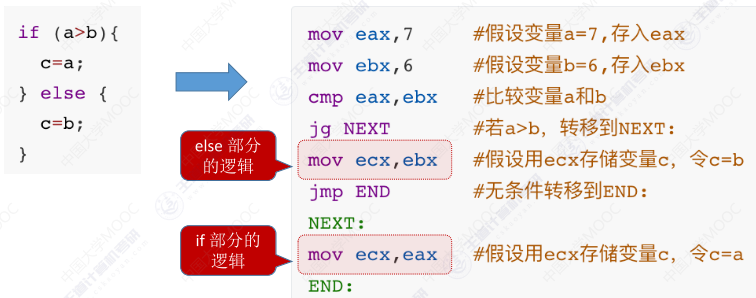
4,if语句
Intel x86 处理器中,程序计数器PC,被称为IP(Instruction Pointer)
无条件转移指令,jmp <地址>,让PC无条件转移至 <地址>
<地址>——类型
①常数
②来自于寄存器
③来自于主存
④用“标号”锚定(≈goto语句)

各种指令——作用
例子
汇语,函数名=“标号”,标注该函数指令的起始地址
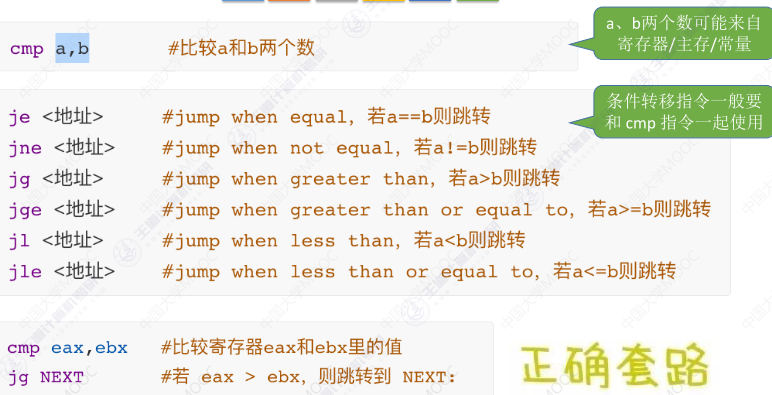
cmp a,b
本质上是a-b,并生成标志位OF、ZF、CF、SF
ALU每次运算的标志位,都自动存入PSW程序状态字寄存器(Intel叫,标志寄存器)
OF,溢出置1,否则置0
SF,结果=负,置1,否则置0
ZF,结果=0,置1,否则置0
CF,进位/借位时置1,否则置0
OF(Overflow Flag)(溢出)
SF(Sign Flag)(符号)
ZF(Zero Flag)(零)
CF(Carry Flag)(进位/借位)
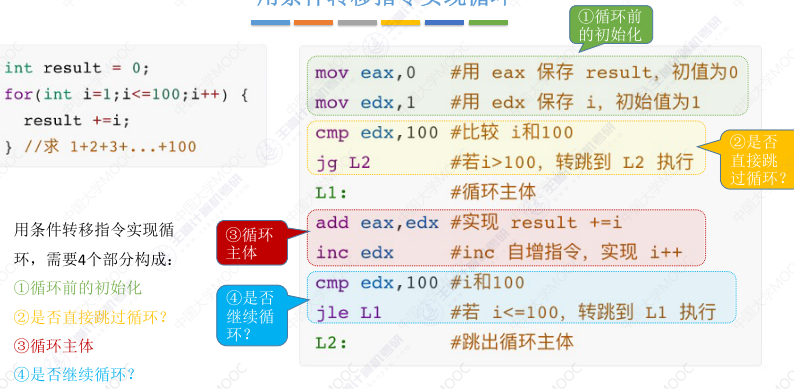
条件转移指令,实现循环
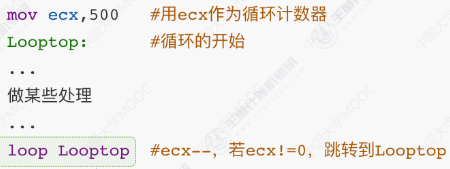
loop指令,实现循环
①loop 更简洁
②loop能做的,条件转移指令也能做
loopx 指令
loopnz——当 ecx!=0 && ZF==0 时,继续循环
loopz——当 ecx!=0 && ZF==1 时,继续循环
5,高语的函数调用
函数调用指令: call <函数名>
函数返回指令: ret
call——作用
①把IP旧值,压栈到栈顶(=push IP)
②设IP新值,无条件转移至被调用函数的第一条指令(=jmp add)
ret指令——作用
从栈顶,找到 IP旧值,出栈,并恢复IP寄存器
函数调用栈——内存中的位置
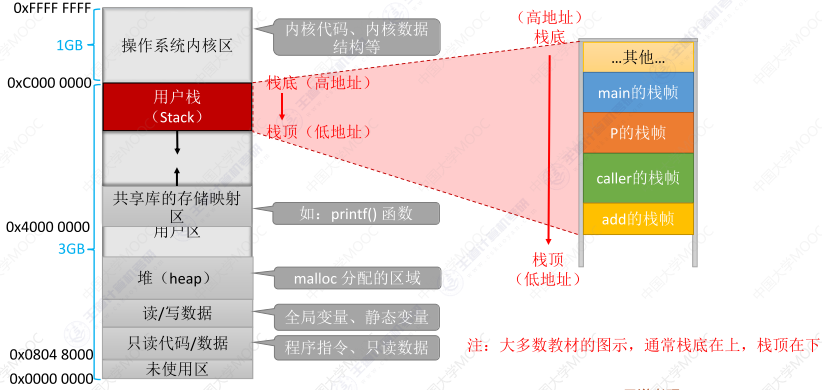
ebp,指向当前栈帧的底部
esp,指向当前栈帧的顶部
(cpu内部只有1个ebp和1个esp)
x86系统中,默认以4字节为栈的操作单位
访问栈帧——方法
1️⃣push+pop指令
push A
pop B
A=立即数、寄存器、主存地址
B=寄存器、主存地址
2️⃣mov指令,,结合 esp、ebp 指针访问栈帧数据
用加、减指令,即 add、sub 改栈顶指针 esp 的值
6,函数调用的机器级表示
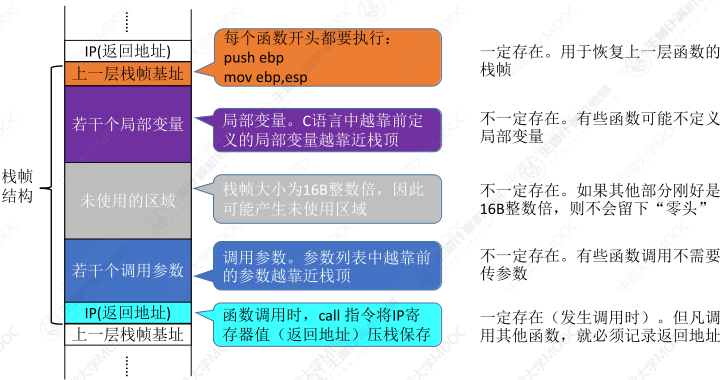
每个函数开头的例行处理

函数调用时——如何切换栈帧

函数返回时——如何切换栈帧

除了main函数,all函数的汇编代码结构都一样

栈帧——内容
①空闲区,gcc编译器,将栈帧大小设=整数*16B
②局部变量,在栈帧底部
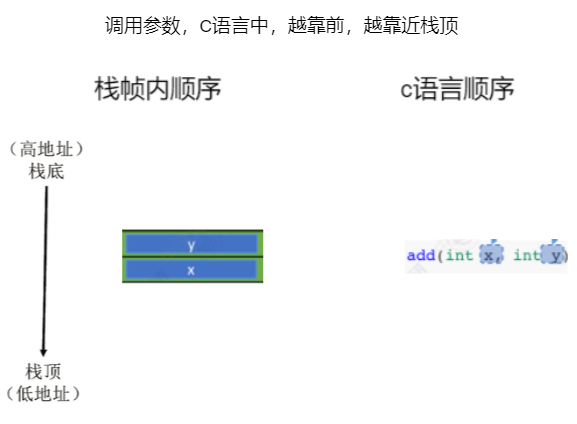
③调用参数,在栈帧顶部
④栈帧最底部,=上一层栈帧基址(ebp 旧值)
⑤栈帧最顶部,=返回地址(当前函数的栈帧除外)
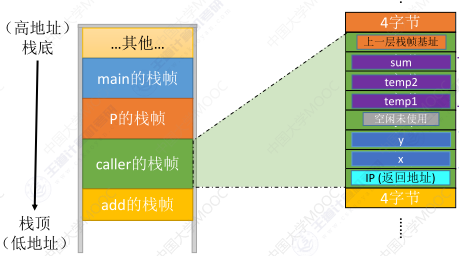
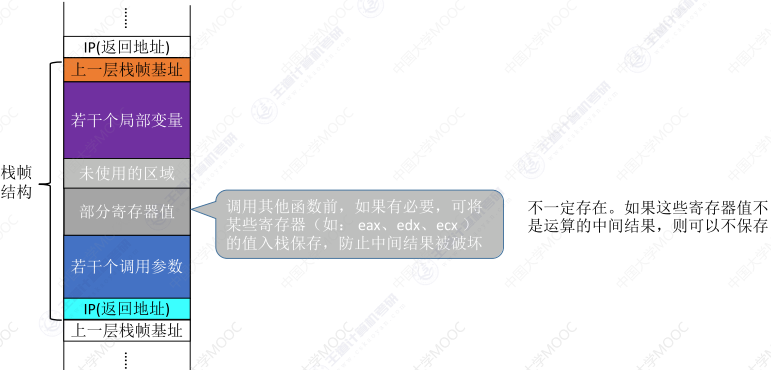
栈帧——内容顺序
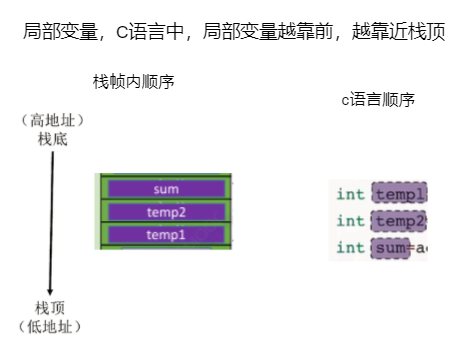
技巧
esp-数,局部变量
ebp+数,调用参数
4.4、CISC和RISC
指令——设计方向
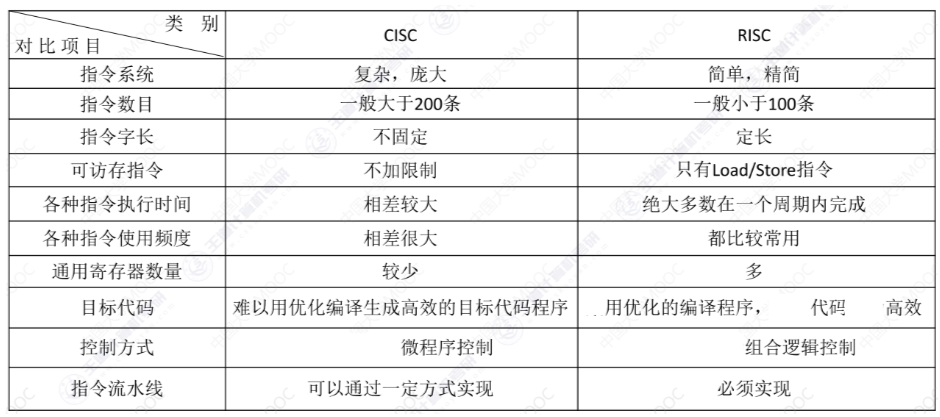
1️⃣CISC(Complex Instruction Set Computer)
①类比:有很多库函数的 C 语言
②思路:一指令,完成一复杂的基本功能
③x86 架构,用于笔记本、台式机
2️⃣RISC(Reduced Instruction Set Computer)
①类比:没有库函数的 C 语言
②思路:一指令完成一基本动作,多指令组合完成一复杂的基本功能
③ARM 架构,用于手机、平板
80-20规律
典型程序中80%的语句,仅使用cpu中20%的指令
对比图
五、中央处理器
5.0、课后题总结
0,其他
1,cpu内部
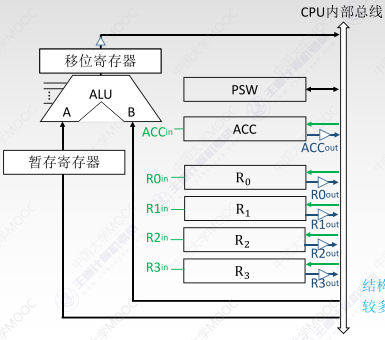
运算器——组成
(1)通寄组(AX、BX、CX、DX、SP)
①放操
②编号
(2)ACC(属于通寄,通寄是可编程指定多种功能的寄存器)
放ALU的结果
(3)移位寄存器SR
①放操
②data 移位
(4)暂存寄存器(对应用程序员透明)
放数据总线、通寄的操
(5)PSW
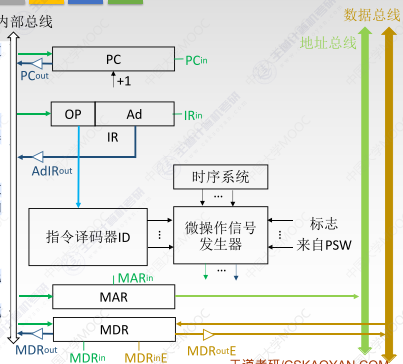
控制器——组成
①PC,指令总是根据PC从主存中读出
②IR
③指令译码器
④微操作信号发生器
⑤时序系统
⑥MAR
⑦MDR
2,PC
PC的值,在cpu执行时(取值T)修改
PC+1——怎么实现
①自增
②转移指令
(+1,指+1个指令长度)
完成一个无条件跳转指令,PC修改的次数
①取值 T 结束,PC+1
②执行 T 中,PC=跳转地址
机器指令中,不能显式使用PC,因为是硬件实现
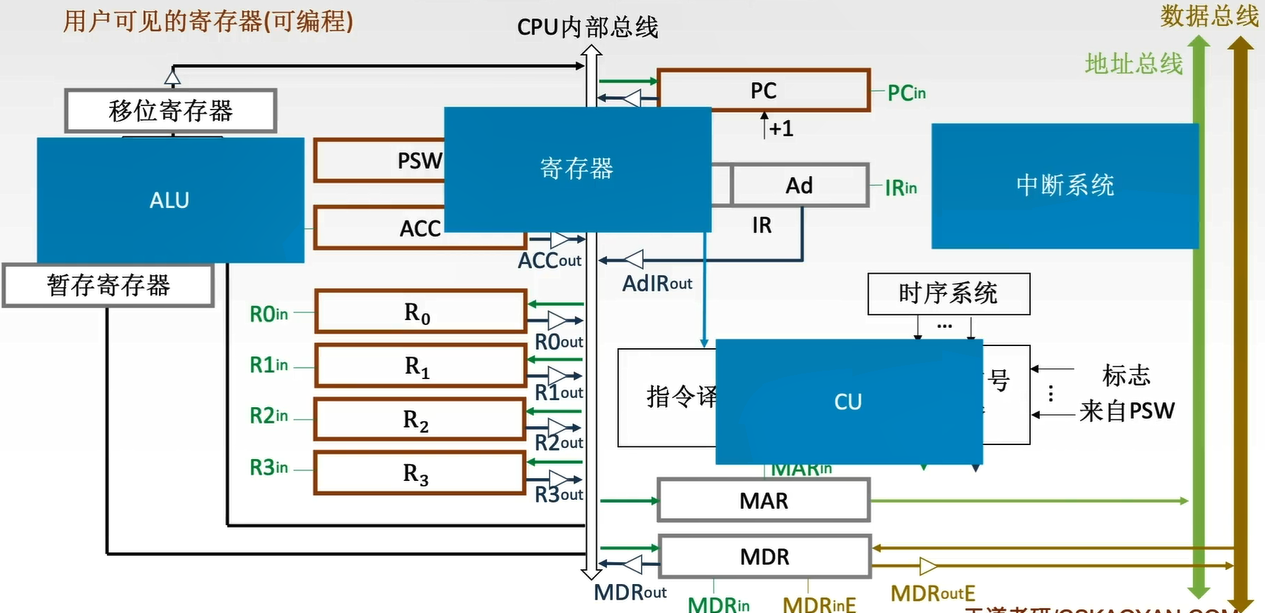
3,透明
程序员看得见
①PSW
②PC③基址寄存器
④通寄组
程序员看不见(因为都在cpu内部)
①IR
②MAR
③MDR
4,位数
PC——怎么表示指令地址
①字节地址,PC 位数=存储器地址位数=存储器容量
②字地址,按边界对齐,PC 位数=存储器地址位数 - log₂(指令字长的字节数)
①MAR,位数=PC 位数
②MDR,位数=存储字长
③通寄,位数=机器字长
④n 位 cpu,n=数据总线位数=cpu 位数=cpu 一次能处理 data 的位数
5,PSW
PSW,不需编号
PSW——放的标志的种类
(1)ZF、OF、SF、CF
(2)中断标志、陷阱标志
执行条件转移指令,先看PSW,判转移条件✔ or X
6,周期
机器T——定义
①由存取 T 确定
②完成一个基本操作,所需的时间
③通过一次总线事务访问,访存一次/IO 一次,所需的时间
存取T,存储器一次读/写,所需的时间
DMA方式,每传一个data,需一个存取T
7,字长
指令字长——定义
①和机器字长无关系
②=整数倍*存储字长
③或=整数倍*B
④若指令字长=存储字长,则机器T=取指T
5.1、cpu的功能与基本结构
1,cpu功能
①指令控制。取、分析、执行指令,即程序的顺序控制
②操作控制。一指令的功能=多个操作信号的组合来实现。cpu 管理并产生由内存取出的每条指令的操作信号,把各种操作信号送往相应的部件
③时间控制。为每条指令按时间顺序,提供应有的控制信号
④数据加工。算、逻运算
⑤中断处理。处理异常情况、特殊请求
cpu每执行完一条指令,就会检查一次中断处理
cpu——基本结构
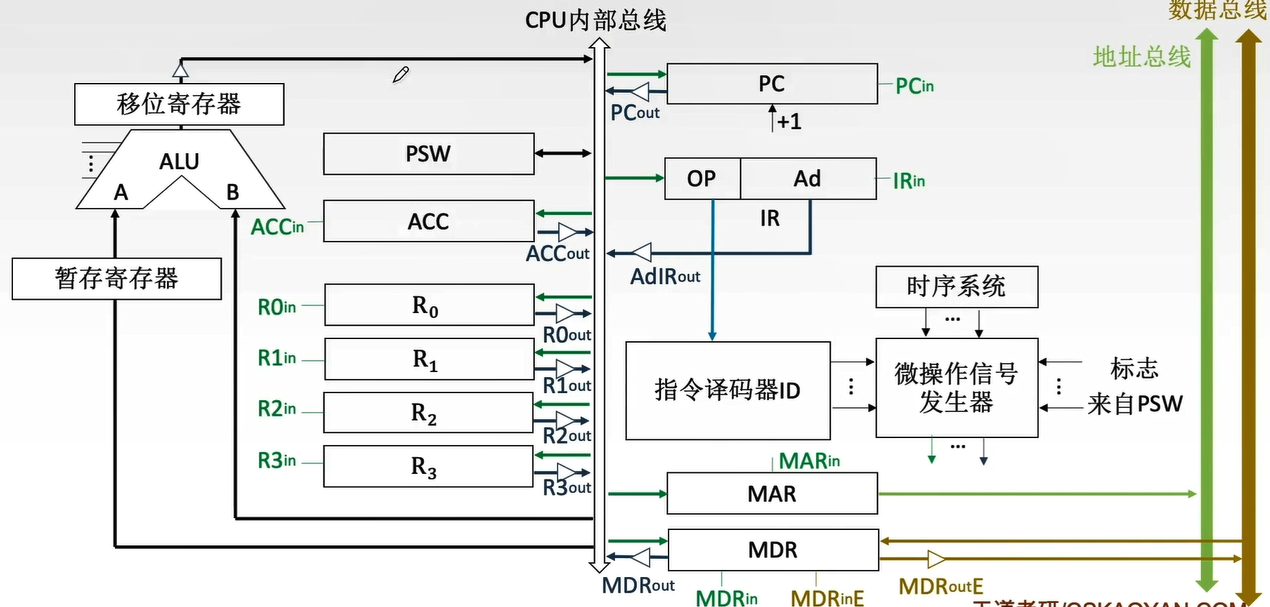
2,运算器——基本结构
①算逻单元:算、逻运算
②通寄组:AX、BX、CX、DX、SP(指向栈顶的指针),放操作数、各种地址信息
③暂存寄存器:暂存主存读来的数据,该数据不能放在通寄,它会破坏原有内容
④累加寄存器:通寄,暂存 ALU 的结果,实现加法
⑤程序状态字寄存器:保留各种状态信息,PSW 中的这些位参与并决定微操作的形成
⑥移位器:对运算结果移位
⑦计数器:控制乘除的操作步数
专用数据通路方式
按指令执行时,数据和地址的流动方向,连线
优,性能高,基本无数据冲突
缺,结构复杂,硬件量大,不易实现
专用数据通路方式——问题
1️⃣线数量多,会复杂
2️⃣直接连线,相当于多个寄存器同时输入①多路选择器
②三态门1通,0不通
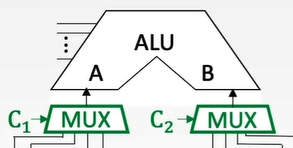
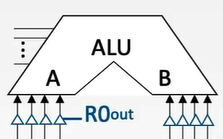
cpu内部单总线方式
把all寄存器的输入端和输出端,都连到一条公共通路上
优,结构简单,易实现
缺,数据传输,多冲突,性能低
3,控制器——基本功能
①程序计数器:cpu 按 PC 的内容,去主存中取指。因程序中指令顺序执行,所以 PC 自增
②指令寄存器:存当前执行的指令
③指令译码器:对操作码字段进行译码,向控制器提供操作信号
④微操作信号发生器(有组合逻辑型、存储逻辑型):根据 IR 的内容(指令)、PSW、时序信号,产生控制整个计系所需的控制信号
⑤时序系统:产生时序信号,由统一时钟(CLOCK)分频得到
⑥存储器地址寄存器:放访存地址
⑦存储器数据寄存器:放往主存写入、从主存读出的信息
5.2、指令执行过程
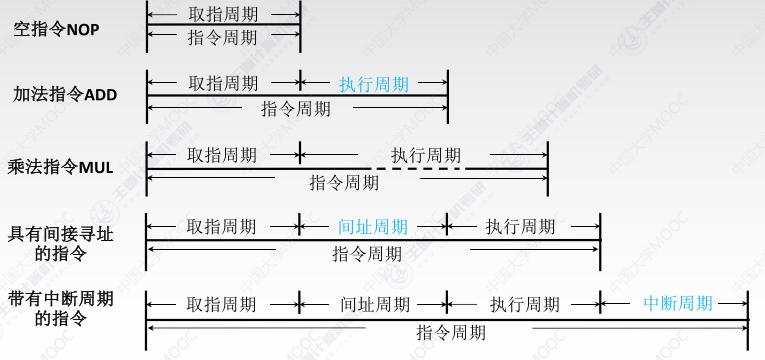
1,指令周期
指令周期
CPU从主存中,每取出并执行一条指令所需的全部时间
(即指令T=取指T+执行T)
指令T=多个机器T
机器T(CPU周期)=多个时钟T(节拍、T周期、CPU时钟T,是CPU操作的最基本单位)
每个指令T内,机器T数可不同
每个机器T内,节拍数也可不同
2,指令周期——数据流
指令周期——流程
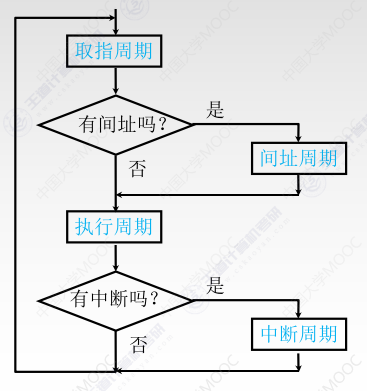
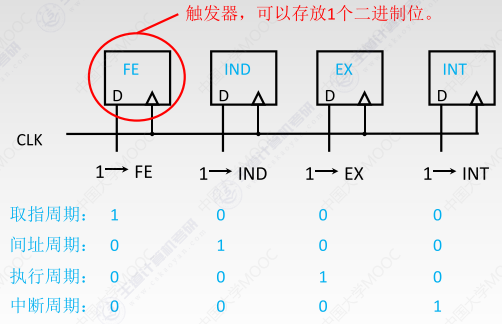
cpu——区分工作周期
都访存,但目的不同
①取指周期,取指令(控制器自动进行,访存一次)
②间址周期,取操的有效地址EA(根据寻址方式的不同,不是必需的步骤)*这中间有一个过程,指令译码器,把操作码——>控制信号
③执行周期,取操作数
④中断周期,保存程序断点
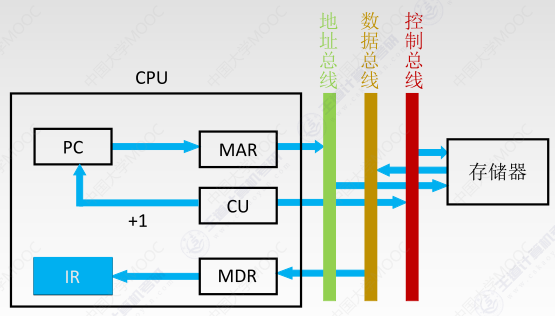
1️⃣取指T——步骤
①当前指令地址,送至地址寄存器,记=(PC) →MAR
②CU发出控制信号,经控制总线传到主存,记=1 → R(读)
③将MAR所指主存中的内容,经数据总线送入MDR,记=M(MAR) →MDR
④将MDR中的内容(此时是指令)送入IR,记=(MDR) → IR
⑤CU发出控制信号,形成下一条指令地址,记=(PC)+1 → PC
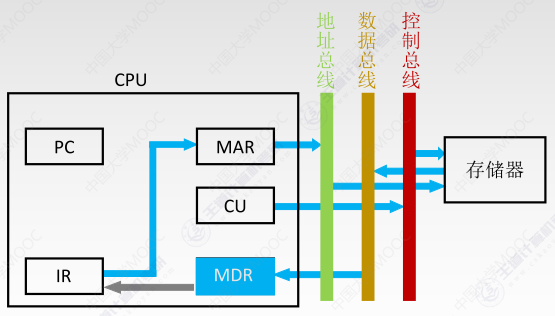
2️⃣间址T——步骤
①将指令地址码,送入MAR,记=Ad(IR) →MAR 或 Ad(MDR) →MAR
②CU发出控制信号,让主存读,记=1 → R
③将MAR所指主存中的内容,经数据总线送入MDR,记=M(MAR) →MDR
④将有效地址,送至指令的地址码字段,记=(MDR)→ Ad(IR)
3️⃣执行T——步骤
无统一的的数据流向
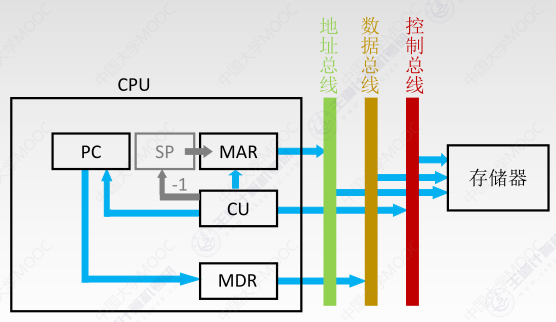
4️⃣中断T——步骤
①CU控制,使SP-1,改后的地址送入MAR,记= (SP)-1 → SP,(SP) →MAR
本质,将断点存入某单元,其地址为a,故可记=a →MAR
②CU发出控制信号,让主存写,记=1 →W
③将断点(PC内容) 送入MDR,记=(PC) →MDR
④CU,将中断服务程序的入口地址(由向量地址形成部件产生)送入PC,记=向量地址→ PC
CU的输入信号来源
①指令译码器(主要)
②时钟(主要)
③执行单元的反馈信息,即标志
中断:暂停当前任务,去完成其他任务
为了能恢复当前任务,用堆栈保存断点。SP-栈顶地址,进栈=先改指针,后存数据
3,指令执行方案
指令执行方案
一个指令周期,包括多个时间段(执行步骤),每个步骤完成一部分功能,几个依次执行的步骤,完成这条指令的全部功能
1️⃣单指令周期
all指令,用相同的执行时间完成
特点
①串行执行
②指令 T 取决于执行时间 max 的指令
③短时间即可完成的指令,要用最长的周期来完成,↓速度
2️⃣多指令周期
不同指令,用不同的执行步骤完成
特点
①串行执行
②用不同个数的时钟周期,完成不同指令的执行过程
③硬件设计复杂
3️⃣流水线方案
每一个时钟周期启动一条指令,尽量让多条指令同时运行,但各自处在不同的执行步骤中
特点
并行执行
5.3、数据通路的功能和基本结构
1,数据通路-单总线结构
数据通路——基本结构
1. CPU内部单总线方式
2. CPU内部多总线方式
3. 专用数据通路方式
单总线
寄存器的输入、输出端都在一条公共路上,而且一时钟T内,只能对一个寄存器操作
内部总线,同一部件,CPU内部连接各寄存器及运算部件之间的总线
系统总线,同一台计系的各部件,如CPU、内存、通道和各类I/O接口间互相连接的总线
用cpu内部总线——特点
①结构简单
②性能低
③冲突多
不用cpu内部总线——特点
①结构复杂
②硬件量大
③性能高
④基本无冲突
1.寄存器之间数据传送
把PC内容送至MAR,实现传送操作
(PC)→Bus PCout有效,PC内容送总线
Bus→MAR MARin有效,总线内容送MAR
2.主存与CPU之间的数据传送
CPU从主存读指令,实现传送操作
(PC)→Bus→MAR PCout和MARin有效,现行指令地址→MAR
1→R CU发读命令(通过控制总线发出)
MEM(MAR)→MDR MDRin有效
MDR→Bus→IR MDRout和IRin有效,现行指令→IR
3.执行算术或逻辑运算
加法指令
Ad(IR)→Bus→MAR MDRout(或AdIRout)和MARin有效
(因为取值先取到MDR,再复制到IR)
1→R CU发读命令
MEM(MAR)→数据线→MDR MDRin有效
MDR→Bus→Y MDRout和Yin有效,操作数→Y
ALU的两个输入信号必须同时有效
2,数据通路-专用通路结构
通过例题学习
组合逻辑元件(操作元件),不含存储信号,输出只取决于当前输入
①加法器
②ALU
③译码器
④多路选择题
⑤三态门
时序逻辑元件(状态元件),含存储信号
①通寄组
②PC
③psw
5.4、控制器的功能和工作原理
1,硬布线控制器
注
①一个节拍内,可并行完成多个微操作
②同一微操作,可能在不同指令的不同阶段被用
③不同指令的执行周期,所需节拍数不同
硬布线控制器——设计步骤
1. 分析每个阶段的微操作序列(取值、间址、执行、中断四个阶段)
据指令操作码、目前的机器周期、节拍信号、机器状态条件,确定该节拍下发出哪些微命令
2. 选择CPU的控制方式
3. 安排微操作时序
原则一,微操作的先后顺序不能改
原则二 ,被控对象不同的微操作,尽量安排在一个节拍内完成
原则三 ,t短的微操作,尽量安排在一个节拍内完成并允许有先后顺序
4. 电路设计
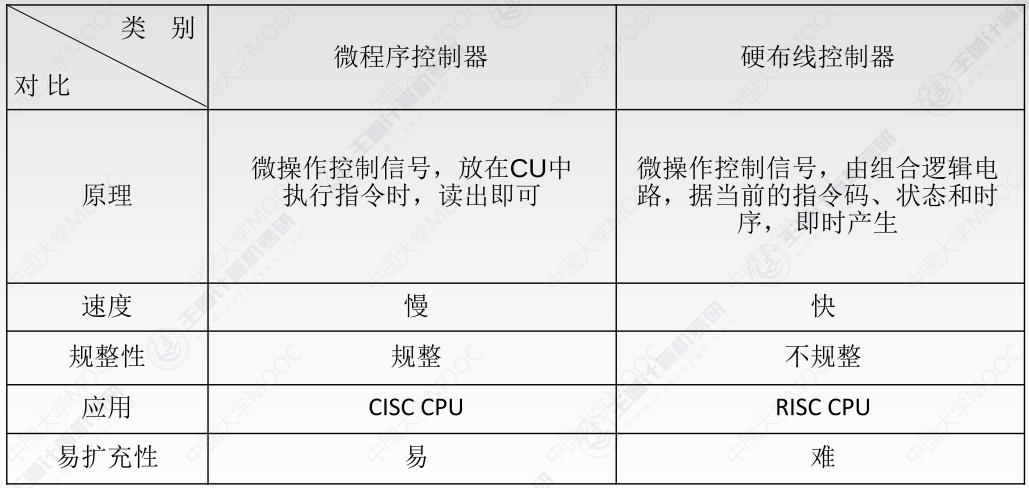
硬布线控制器——特点
①指令越多,越复杂,一般用于 RISC(精简指令集系统)
②扩充新指令,设计要大改,故扩充指令较困难
③用纯硬件实现控制,执行速度很快
④微操作控制信号由组合逻辑电路即时产生
各种指令
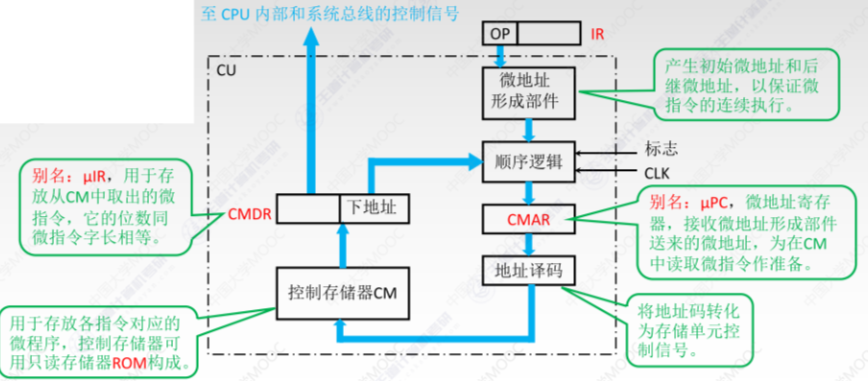
2,微程序控制器
硬布线控制器VS微程序控制器
①速度,硬>微,因为微要从 CM 中读微指令
②时序复杂度,硬>微,因为微只需按时钟 T 顺序执行指令
③灵活性,硬<微,微修改更方便
易混淆概念——复杂
程序:由指令序列组成
微程序:由微指令序列组成,每一种指令对应一个微程序
指令,对程序执行步骤的描述
指令,对微指令功能的封装
微指令,对指令执行步骤的描述
易混淆概念——简单
程序,一堆机器指令
微程序,一堆微指令
指令,对应≥1个微指令,=1个微程序
微指令,对应≥1个微操作(又称微命令)
主存,放机器指令
控制存储器CM,放微指令(微程序控制器的核心,是cpu的一部分,由ROM组成)(按地址寻访,厂家写好all微程序)
指令T,从主存中,取出、执行一机器指令的t
微指令T,从控制器存储器中,取出一微指令,并执行微操作的t
all指令的取指T、间址T、中断T所对应的微指令序列都一样
取指T的微程序段是公用的,故机器指令=n,则CM中微程序段≥n+1
(若逻辑上把取指T、执行T当作整体,则CM中微程序≥n)
早期、物联网设备的CPU,可无间接寻址和中断功能,故不含间址T、中断T的微程序
微程序控制器——基本结构
upc不能代替pc,upc在微程序中指出下一条微指令的寄存器
3,微指令的格式
相容性微命令:可并行完成的微命令
互斥性微命令:不允许并行完成的微命令
微指令——基本格式
微指令——格式类型
1. 水平型微指令
一水平型微指令,执行多个可并行的微操作
优,微程序短,速度快
缺,微指令长,编程麻烦特,控制信号经编码产生
2. 垂直型微指令
一垂直型微指令,执行一个微操作,由微操作码规定其功能
优,微指令短,易编程
缺,微程序长,速度慢特,微指令中有微操作码,≈机器指令格式
3. 混合型微指令
用垂直型,加一些简单的并行操作
优
微指令较短,易编程
微程序不长,速度快
4,微指令的编码方式
(1) 直接编码(直接控制)
在微指令的操作控制字段中,每一位代表一个微操作,1-有效
优,简单、直观,速度快,并行性好
缺,微指令长,n个微操作,需微指令=n位,使CM大
(2) 字段直接编码
微指令,分段,每段经译码后发出控制信号
微命令字段分段——原则
①互斥性微命令,在同一段;相容性微命令,在不同段内
②每段的位要少,否则译码复杂
③每段留出一个状态,表示本段不微操作
优,缩短微指令字长
缺,译码后,再微操作,比(1)慢
字段直接编码——做题
字段直接编码需要多留一串,以表示不输出
即,微指令种类=2²个,那么位数应=2³
(3) 字段间接编码(隐式编码)
一字段的某些微命令,需另一字段的微命令来解释
优,进一步缩短微指令字长
缺,并行弱,速度更慢
5,微指令的地址形成
1. 微指令的下地址字段指出
断定方式
微指令格式中,设一下地址字段,由微指令的下地址字段直接指出后继微指令的地址
2. 由机器指令的操作码形成
当机器指令取至IR后,微指令的地址,由操作码经微地址形成部件形成
3. 增量计数器法
( CMAR ) + 1——>CMAR
4. 分支转移
转移方式:指明判别条件转移地址:指明转移成功后的去向
5. 通过测试网络
6. 由硬件产生微程序入口地址
机器指令的操作码,形成微程序入口地址
6,微程序控制单元的设计
微程序控制单元——设计步骤
1. 分析各阶段的微操作序列
2. 写出微操作、节拍安排
(1) 各T所需的微操作
(2) 微程序控制器特有的微操作
①取指周期
Ad (CMDR) —>CMAR (每条微指令结束之后都需要进行)
OP (IR) —>微地址形成部件—>CMAR(取指周期的最后一条微指令完成后,根=据操作码,确定执行周期的微程序首地址)
②执行周期
Ad(CMDR) —>CMAR (每条微指令结束之后都需要进行)
3. 确定微指令格式
①微操作个数决定编码方式,从而确定操作控制字段的位数
②CM 中微指令总数决定下地址的位数
③操作控制字段与下地址的位数之和为微指令字长的位数
4. 编写微指令码点
据操作控制字段的微操作,编各条微指令的码点
微程序设计——分类
1. 静、动态微程序设计
静,微程序不变,用ROM
动,改微指令、微程序—>改机器指令(利于仿真,用EPROM)
2. 毫微程序设计
毫微程序,解释微程序
硬布线VS微程序
5.6、指令流水线
1,概念
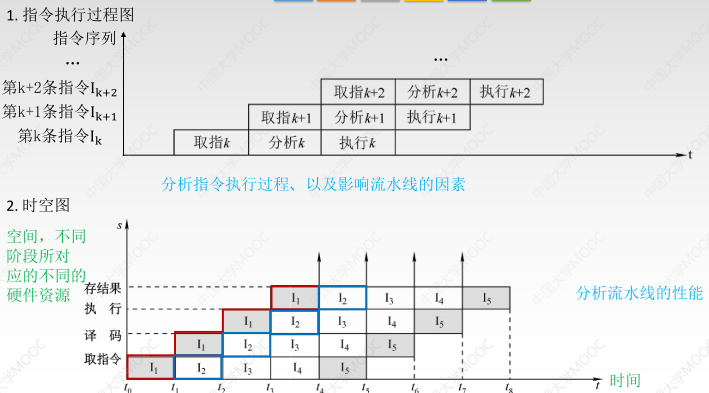
指令流水
一指令的执行过程,可分成多阶段。计不同,分法也不同
指令流水——方式(设取指=分析=执行=t)
传统冯·诺依曼机,用串行执行方式
优,控制简单,硬件代价小
缺,速度慢,whenever,cpu中只有一指令在执行,利用率低
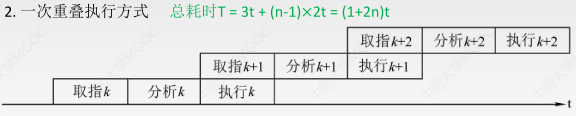
优,t比顺缩短了1/3,利用率↑
缺,硬件开销大,更复杂
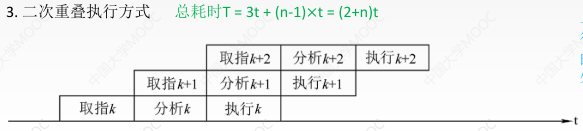
t比顺缩短了2/3
各指令的执行过程,也可分成4/5个阶段,5常见

流水线——表示方法
2,性能指标
以下都是理想情况
①各阶段t相同
②各阶段结束可立即进入下一阶段
一指令的执行,分为k个阶段,每个阶段耗时Δt ,Δt =一个时钟T
1. 吞吐率TP
定义:单位时间内,流水线所完成的任务数,或输出量
①设任务数=n,处理n个任务耗时=Tk,则吞吐率
②,则实际吞吐率
③n→∞时,最大吞吐率
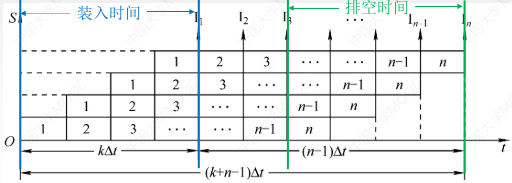
2. 加速比S
(设T0=不用流水线的t(即顺序执行),Tk=用流水线的t)
定义:完成同样一批任务,T0 / Tk①
②1个任务耗时=kΔt,n个任务耗时
,
则实际加速比
③n→∞时,最大加速比Smax=k

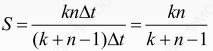
3. 效率E
定义:流水线的设备利用率①时空图上,
②n→∞时,最高效率Emax=1
3,影响因素
各阶段耗时一样
流水线每一段,都有一缓冲寄存器(锁存器),保存本流水段的执行结果,提供给下一流水段用
影响因素
1. 结构相关(资源冲突)
多指令,在同一时刻,争用同一资源
解决
①后一指令暂停一 T
②资源重复配置:包括数据存储器和指令存储器
2. 数据相关(数据冲突)
一程序中,前一指令执行完,才能执行后一条指令
解决
①硬件阻塞(stall)、软件插入“NOP”
②数据旁路技术(又称转发机制)
③编译优化,用编译器,调顺序
3. 控制相关(控制冲突)
转移指令、其他改变PC值的指令,造成断流
解决
①转移指令分支预测=简单预测、动态预测
②预取转移成功、不成功,两个控制流方向上的目标指令
③加快和提前形成条件码
④↑ 转移方向的猜准率
4,流水线——分类
1.部件功能级、处理机级、处理机间级流水线
①部件功能级,再细分
②处理机级,把一指令解释过程分成多个子过程
③处理机间,一种宏流水,每一 cpu 完成某一专门任务
2.单功能流水线、多功能流水线
①单功能,只实现一种专门功能
②多功能,可同时或不同时,实现多种功能
3.动态流水线、静态流水线
①静,各段,只能 A 运算
②动,同一时间内,某段 A 运算时,另一段 B 运算
4.线性流水线、非线性流水线
①线,每段只允许经过一次,无反馈回路
②非线,某些段将多次通过流水线,用于线性递归运算
5,流水线——多发技术
①每个时钟 T,可并发多条独立指令
②不能调顺序
③要多个功能部件
④用编译优化搭配指令
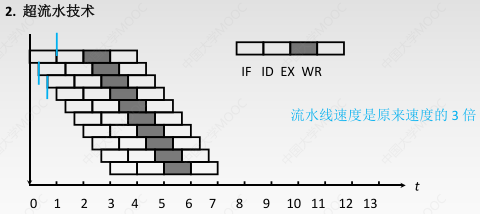
①在一个时钟 T 内,再分段
②不能调顺序
③在一个时钟 T 内,一功能部件用多次
④靠编译程序解决优化问题
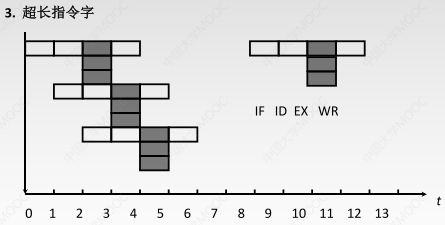
①编译程序挖出指令的并行性,把可并行的指令组合
②有多个操作码字段的超长指令字
③用多个处理部件
6,五段式指令流水线
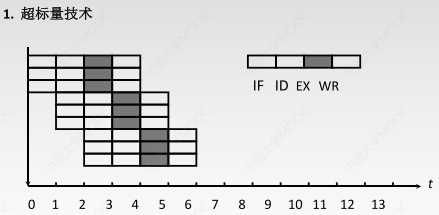
1. 运算类指令
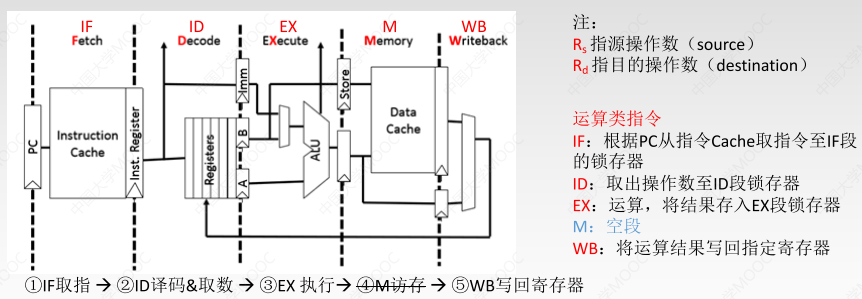
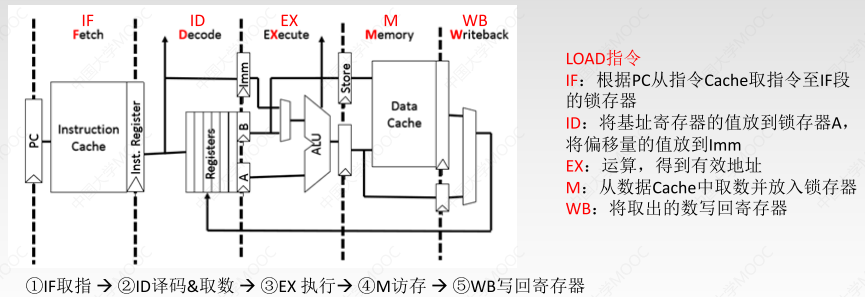
2. LOAD指令
RISC处理器,取数LOAD、存数STORE指令,才能访存
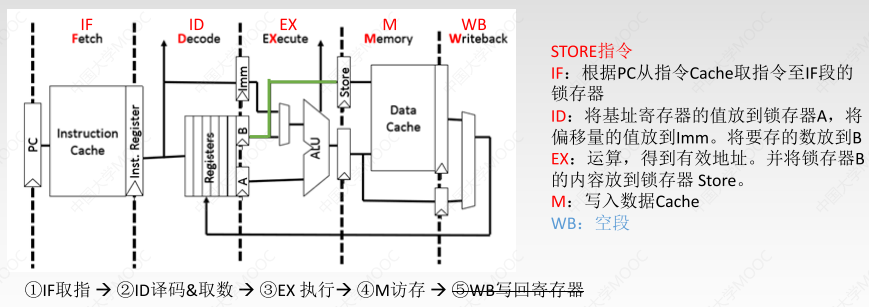
3. STORE指令
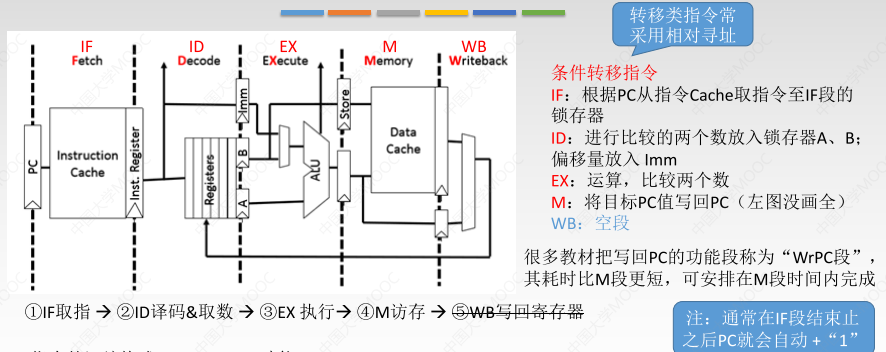
4. 条件转移指令
5. 无条件转移指令
WrPC段,耗时比EX段短,可放在在EX段完成
WrPC段,越早完成,就越能避免控制冲突

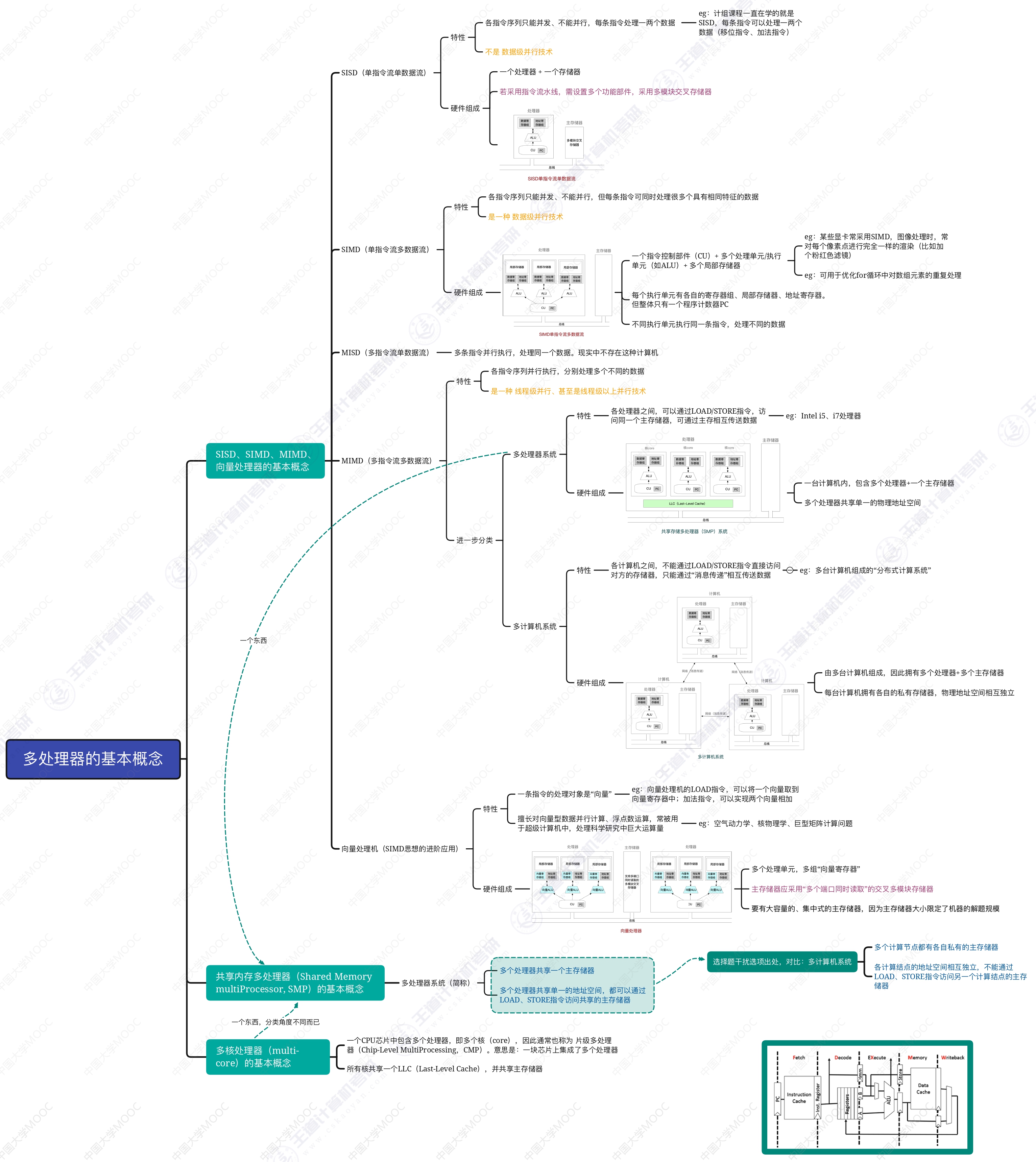
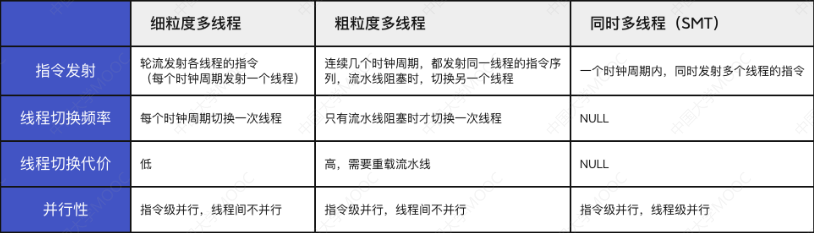
5.7、多处理器
1,概念
2,硬件多线程
六、总线
6.1、总线概述
1,基本概念
总线的物理实现
同一时刻,只能一个部件发数据,可有多个部件接数据
总线
一组能为多个部件,分时共享的公共信息传送线路
早期计算机,因为外设少,大多用分散连接方式,不易实现随时增减外设
总线——特性
①机械特性:尺寸、形状、管脚数、排列顺序
②电气特性:传输方向和有效电平范围
③功能特性:每根传输线的功能(地址、数据、控制)
④时间特性:信号的时序关系
2,总线——分类
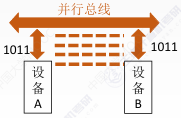
1️⃣按数据传输格式
优
①只要一条传输线,便宜,用于长距离传输
②用于计内部时,可省空间
缺
①因为数据每次只传 1bit,要进行拆卸和装配
②要考虑串行-并行转换
优
逻辑时序简单,电路易实现
缺
①信号线多,占空间多
②远距离传输贵
③工作频率较高时,并行的线会互相干扰

注
①工作频率一样时,速度并>串
②由于并的工作频率不能太高,故串的速度可>并
2️⃣按总线功能
1. 片内总线
cpu内部,寄存器与寄存器、寄存器与ALU之间的线
2. 系统总线
计系内各部件(CPU、主存、I/O接口)之间互连的线按系统总线的传输信息
1)数据总线DB
①传各部件之间的信息=指令、操作数
②双向
③位数与机器字长、存储字长有关
2)地址总线AB
①指出数据总线上的数据所在地址
②单向(cpu 发出)
③位数与主存地址空间的大小有关
3)控制总线CB
①一根控制线,传一个信号
②双向(cpu 发出、主存和外设发给 cpu)
3. 通信总线(外部总线)
计系与计系
3️⃣按时序控制方式
同步、异步
3,系统总线——结构
1️⃣单总线结构
结构:CPU、主存、I/O设备,连在一组总线上,允许它们直接交换信息
优
①结构简单
②成本低
③易于接入新设备
缺
①带宽低、负载重
②多个部件争唯一的总线
③不支持并行传送

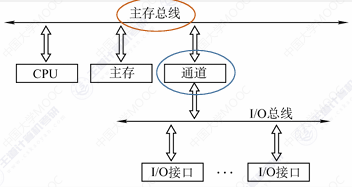
2️⃣双总线结构
结构:一条主存总线,CPU、主存、通道;一条I/O总线,外设与通道
主存总线,支持突发(猝发)传送:送出一个地址,收到多个地址连续的数据
通道=小cpu,管理I/O设备,通道程序放在主存
优
将较低速的I/O设备,从单总线上分离出来,实现存储器总线和I/O总线分离。
缺
需通道等硬件设备
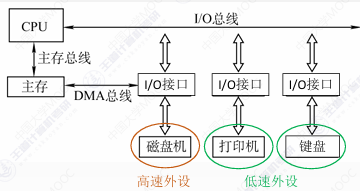
3️⃣三总线结构
结构:主存总线、I/O总线、直接内存访问DMA总线
优
①↑ I/O 设备的性能,更快响应命令
②↑ 吞吐量
缺
效率低,因为三线同时只能工作一个
磁带的读写单位=块
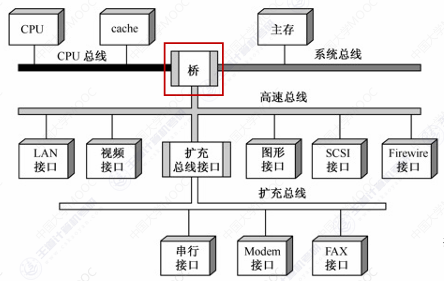
4️⃣四总线结构
①桥接器:连不同的总线,数据缓冲、转换、控制
②越靠近 CPU,速度越快
③每级都遵循总线标准
4,总线的性能指标
1. 总线的传输周期(总线周期)
一次总线操作所需的时间
(包括申请、寻址、传输、结束阶段),由多个总线时钟周期构成
2. 总线时钟周期
即机器的时钟周期(有些计算机,可能由桥接器提供)
总线周期与总线时钟周期的关系,很乱
3. 总线的工作频率
总线上各种操作的频率,=1/总线周期
若总线周期=n个时钟周期,则总线的工作频率=时钟频率/n,指一秒内传送几次数据
4. 总线的时钟频率
即机器的时钟频率,=1/时钟周期
若时钟周期为t,则时钟频率=1/t,指一秒内有多少个时钟周期
5. 总线宽度(总线位宽)
是总线上同时能够传输的数据位数(一般是指数据总线的根数)
6. 总线带宽
是总线的数据传输率,即单位时间内,总线上可传输数据的位数
用每秒钟传的字节数来衡量,单位=字节/秒(B/s)
注
总线带宽,是max传输速率
有效数据传输率=实际传输的数据量/耗时

7. 总线复用
指一种信号线,在不同的时间,传不同的信息。用较少的线传更多的信息,省空间、成本
8. 信号线数
地址、数据、控制总线,3种总线数的总和
6.2、总线事物和定时
0,总线仲裁
408大纲已删
1,总线周期——阶段
1)申请分配
需要使用总线的主模块/主设备A,提出申请,经总线仲裁机构决定,将下一传输周期的总线使用权,授予A(可细分为传输请求、总线仲裁)
2)寻址
A通过总线,发出访问从模块的地址B、相关命令,启动B
3)传输
A和B数据交换,可单向或双向
4)结束
A的信息,从系统总线上撤除,让出总线使用权
2,总线定时
总线定时——定义
指总线在双方交换数据的过程中,需要时间上配合关系的控制(实质是一种协议或规则)
总线定时——方案
①同步通信(同步定时方式)
系统统一规定
优,速度快、逻辑简单
缺,主从设备强制性同步、不能及时检验通信、可靠性差
适于,总线长度短、总线所接部件的存取时间差不多
②异步通信(异步定时方式)
主从设备商讨(为方便记忆,主A,从B)
优,总线T长度可变,速度相差大的设备,能可靠交换信息
缺,比同步复杂、速度比同步慢
1)不互锁方式(速度最快、最不可靠)
A,发出请求a,a过一会自动删
B,收到a后,发出回答b,b过一会自动删
2)半互锁方式
A,发出请求a,必须收到b,a才删
B,收到a后,发出回答b,b过一会自动删
3)全互锁方式(速度最慢、最可靠)
A,发出请求a,必须收到b,a才删
B,收到a后,发出回答b,必须等到a删后,b过才删
③半同步通信
统一时钟的基础上,加一个等待响应信号
④分离式通信
原理
①A 发地址、命令
②B 准备数据 ——>这时候不占总线,把这个时间让给别人
③B 向 A 发数据
特点
①各模块,均有权申请占用总线
②同步方式通信,不等对方回答
③各模块,准备数据时,不占总线
④总线利用率↑
6.3、总线标准
408大纲已删
七、输入输出系统
7.1、IO系统
1,概述
I/O 设备(可统称为外设)
可实现data,从I/O 设备——>计,或计——>I/O 设备的外设
常见的I/O设备
①输入设备,鼠标、键盘
②输出设备,显示器、打印机
③可输入、又可输出的设备(外存),硬盘、光盘
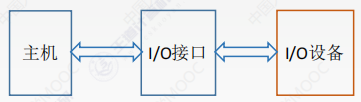
I/O接口(又称I/O控制、I/O Controller、设备控制器)
(是一块芯片,常被集成在主板上,或者集成在南桥芯片内部)
协调主机与外设之间的数据传输
I/O系统——组成
(1)I/O 硬件(包括外设、I/O接口 、I/O总线)
(2)I/O 软件(包括驱动程序、用户程序、管理程序、升级补丁)
用I/O指令和通道指令,实现主机<—>I/O设备的信息交换
①I/O 指令(cpu执行)
操作码,识别是不是IO指令
命令码,对IO设备干什么
设备码,哪个IO设备
②通道指令(通道执行)
通道程序提前编好放在主存
2,IO控制方式
I/O控制——方式
(1)程序查询方式
cpu检查psw
若IO=已完成,再从data寄存器取输入data
若IO=未完成,一直等,不能做其他事
(2)程序中断方式
等IO时,cpu可做其他事
若IO完成后,IO控制器——>cpu发中断请求,cpu响应中断请求,然后取输入data
(3)DMA控制方式
主存与高速I/O设备之间,有一条直接数据通路(DMA总线)
(4)通道控制方式
通道是具有特殊功能的处理器(弱鸡版cpu),对I/O设备统一管理
3,外设

















 8万+
8万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









