






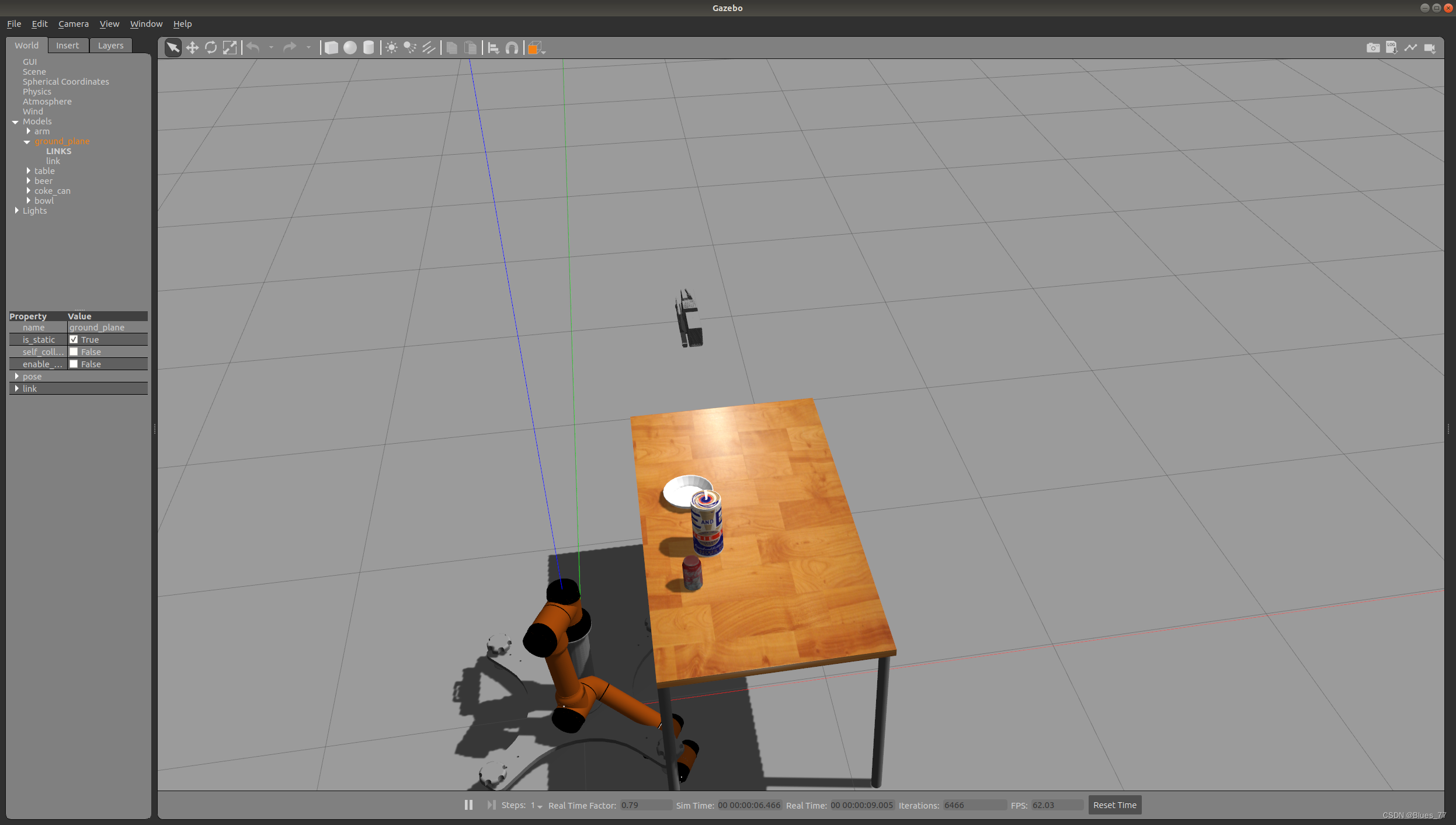
当使用moveit 联合gazebo对机械臂进行仿真时,出现gazebo中机械臂软绵无力并且倒下的情况,具体如下:
此时在启动界面同时出现:Controller Spawner couldn't find the expected controller_manager ROS interface
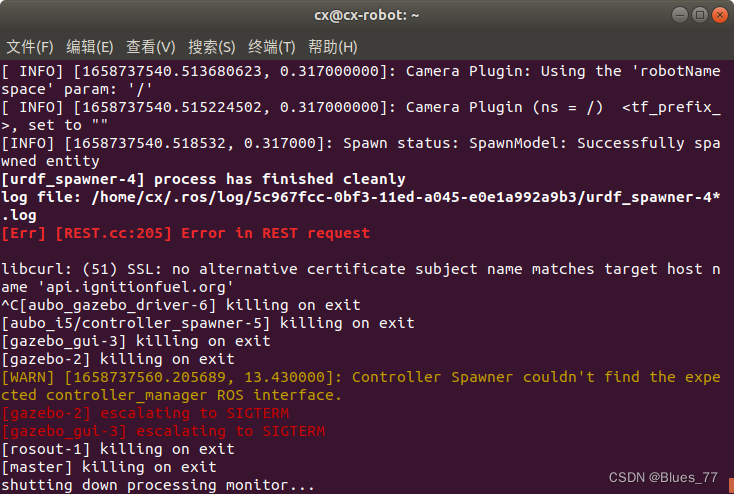
这个的主要原因是gazebo的版本不对应,执行
sudo apt install ros-melodic-gazebo-*就可以解决。
当使用moveit 联合gazebo对机械臂进行仿真时,出现gazebo中机械臂软绵无力并且倒下的情况,具体如下:
此时在启动界面同时出现:Controller Spawner couldn't find the expected controller_manager ROS interface
这个的主要原因是gazebo的版本不对应,执行
sudo apt install ros-melodic-gazebo-*就可以解决。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























