






一、所需库的github地址:
openvslam:laxnpander/openvslam: OpenVSLAM: A Versatile Visual SLAM Framework (github.com)
openrealm_ros_bridge:
laxnpander/OpenREALM_ROS1_Bridge: ROS1 bridge for OpenREALM, a real-time aerial mapping framework (github.com)
注意:保证cmake在3.15版本以上
二、openvslam安装:
依赖
GCC >= 4.8 (必须支持C++11特性)
Eigen >= 3.3.0
g2o
SuiteSparse
DBoW2 : 必须使用作者的修改版 https://github.com/shinsumicco/DBoW2.
yaml-cpp >= 0.6.0
OpenCV >= 3.4.0
0.依赖安装
sudo apt-get update
sudo apt-get --no-install-recommends
sudo apt-get build-essential pkg-config cmake git wget curl unzip
sudo apt-get libatlas-base-dev libsuitesparse-dev
sudo apt-get libgtk-3-dev
sudo apt-get ffmpeg
sudo apt-get libavcodec-dev libavformat-dev libavutil-dev libswscale-dev libavresample-dev
sudo apt-get libgoogle-glog-dev libgflags-dev
sudo apt-get install libopenblas-dev
sudo apt-get install --no-install-recommends libboost1.58-all-dev
sudo apt-get install libx11-dev
sudo apt-get install libgl1-mesa-dev sudo apt-get install libglu1-mesa-dev
sudo apt-get install freeglut3-dev
sudo apt-get install doxygen
wget https://nchc.dl.sourceforge.net/project/glew/glew/2.1.0/glew-2.1.0.tgz --no-check-certificate
tar -xzvf glew-2.1.0.tgz cd glew-2.1.0/
make -j2
sudo make install
sudo ln -s /usr/lib64/libGLEW.so.2.1 /usr/lib/libGLEW.so.2.1
sudo ldconfig -v
1. Eigen安装(最新3.3.7)
wget https://github.com/eigenteam/eigen-git-mirror/archive/3.3.7.tar.gz
tar -xzvf 3.3.7.tar.gz
mv eigen-git-mirror-3.3.7/ eigen-3.3.7/
cd eigen-3.3.7/
mkdir build && cd build
cmake \
-DCMAKE_BUILD_TYPE=Release \
-DCMAKE_INSTALL_PREFIX=/usr/local \
..
make -j2
sudo make install
sudo ldconfig -v
2. 安装g2o
git clone https://github.com/RainerKuemmerle/g2o.git
cd g2o
mkdir build && cd build
cmake \
-DCMAKE_BUILD_TYPE=Release \
-DCMAKE_INSTALL_PREFIX=/usr/local \
-DCMAKE_CXX_FLAGS=-std=c++11 \
-DBUILD_SHARED_LIBS=ON \
-DBUILD_UNITTESTS=OFF \
-DBUILD_WITH_MARCH_NATIVE=ON \
-DG2O_USE_CHOLMOD=ON \
-DG2O_USE_CSPARSE=ON \
-DG2O_USE_OPENGL=OFF \
-DG2O_USE_OPENMP=ON \
..
make -j2
sudo make install
sudo ldconfig -v
3.安装OpenCV3
wget -q https://github.com/opencv/opencv/archive/3.4.5.zip
unzip -q 3.4.5.zip
rm -rf 3.4.5.zip
cd opencv-3.4.5
mkdir -p build && cd build
cmake \
-DCMAKE_BUILD_TYPE=Release \
-DCMAKE_INSTALL_PREFIX=/usr/local \
-DENABLE_CXX11=ON \
-DBUILD_DOCS=OFF \
-DBUILD_EXAMPLES=OFF \
-DBUILD_JASPER=OFF \
-DBUILD_OPENEXR=OFF \
-DBUILD_PERF_TESTS=OFF \
-DBUILD_TESTS=OFF \
-DWITH_EIGEN=ON \
-DWITH_FFMPEG=ON \
-DWITH_OPENMP=ON \
..
make -j2
sudo make install
sudo ldconfig -v
4.安装Pangolin
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
mkdir build && cd build
cmake \
-DCMAKE_BUILD_TYPE=Release \
-DCMAKE_INSTALL_PREFIX=/usr/local \
..
make -j
sudo make install
sudo ldconfig -v
5.安装DBoW2
git clone https://github.com/shinsumicco/DBoW2.git
cd DBoW2
mkdir build && cd build
cmake \
-DCMAKE_BUILD_TYPE=Release \
-DCMAKE_INSTALL_PREFIX=/usr/local \
..
make -j2
sudo make install
sudo ldconfig -v
6.安装yaml-cpp
git clone https://github.com/jbeder/yaml-cpp
cd yaml-cpp
mkdir build && cd build
cmake \
-DCMAKE_BUILD_TYPE=Release \
-DCMAKE_INSTALL_PREFIX=/usr/local \
..
make -j2
sudo make install
sudo ldconfig -v
7. 编译主项目
https://github.com/xdspacelab/openvslam
cd openvslam
git submodule init
git submodule update
mkdir build && cd build
cmake \
-DBUILD_WITH_MARCH_NATIVE=OFF \
-DUSE_PANGOLIN_VIEWER=ON \
-DUSE_STACK_TRACE_LOGGER=ON \
-DBOW_FRAMEWORK=DBoW2 \
-DBUILD_TESTS=OFF \
..
make -j2
三、openrealm安装
# Get the library
git clone https://github.com/laxnpander/OpenREALM.git
# For 3D reconstruction with Plane Sweep Lib (PSL)
git submodule init
git submodule update
# Install the dependencies
cd OpenREALM/tools
chmod u+x install_deps.sh
./install_deps.sh
# Build and install the main library
cd ..
mkdir build && cd build
cmake ..
make all
sudo make install注意:其中的./install_deps.sh中包含的库中多数已经安装过,可以文本形式打开,自己选择其中未安装项进行安装
注意:下载后一定要进行git submodule init以及git submodule update,否则会发生PSL库缺失的情况
四、openrealm_ros_bridge安装
安装ros环境:
1)设置sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2)设置秘钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update
sudo apt install ros-melodic-desktop-full(推荐安装桌面完全版)
3)初始化rosdep
在你使用 ROS 之前,需要初始化 rosdep。rosdep 让你能够轻松地安装被想要编译的源代码,或被某些 ROS 核心组件需要的系统依赖。
sudo rosdep init
rosdep update
4)将ROS环境变量自动添加到新bash
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
5)构建工厂依赖
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential安装ros相关的依赖项:
sudo apt install -y -q ros-$ROS_DISTRO-geographic-msgs
sudo apt install -y -q ros-$ROS_DISTRO-geodesy
sudo apt install -y -q ros-$ROS_DISTRO-cv-bridge
sudo apt install -y -q ros-$ROS_DISTRO-rviz
sudo apt install -y -q ros-$ROS_DISTRO-pcl-ros
sudo apt install -y -q python-catkin-tools build-essential git wget安装realm_ros_bridge:
# Create a ROS workspace for compilation
cd ~
mkdir catkin_ws && cd catkin_ws
mkdir src && cd src
# Get the ROS package
git clone https://github.com/laxnpander/OpenREALM_ROS1_Bridge.git
# Make sure you are in catkin_ws, not src. Then build it
cd ..
catkin_make -DCMAKE_BUILD_TYPE=Release测试准备:
下载测试数据集:https://drive.google.com/open?id=1-2h0tasI4wzxZKLBbOz3XbJ7f5xlxlMe
解压 tar -xvzf open_realm_edm_dataset.tar.gz
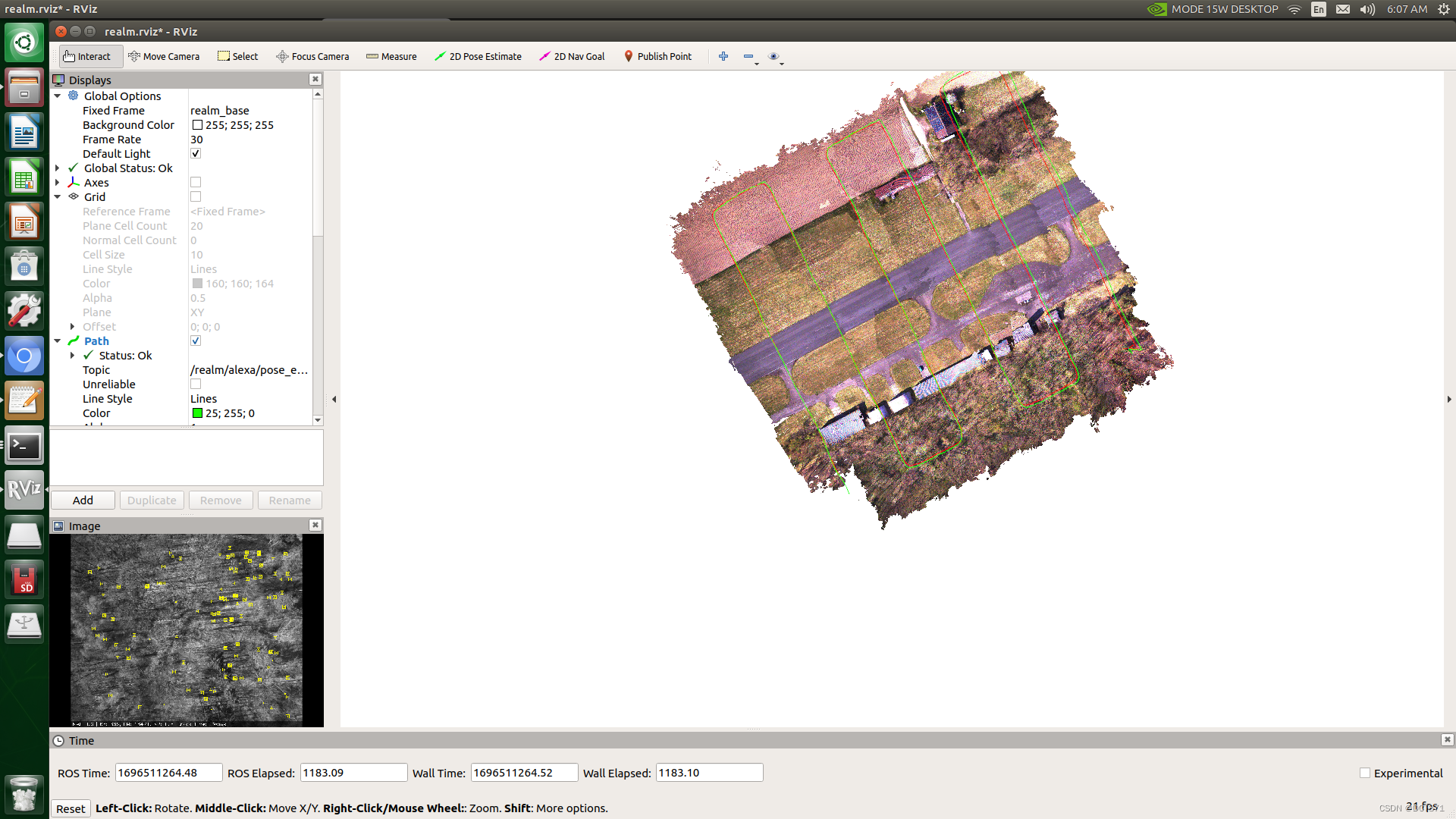
执行roslaunch realm_ros alexa_gnss.launch
the result of the roslaunch realm_ros alexa_noreco.launch


















 1481
1481

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









