










 该文介绍了一个图像处理应用,用户可以通过滑块调整HSV值,实现对图片的实时掩膜处理。应用显示了经过OpenCV算法处理后的二值化图像,并在界面上显示鼠标位置的像素坐标及BGR值。
该文介绍了一个图像处理应用,用户可以通过滑块调整HSV值,实现对图片的实时掩膜处理。应用显示了经过OpenCV算法处理后的二值化图像,并在界面上显示鼠标位置的像素坐标及BGR值。
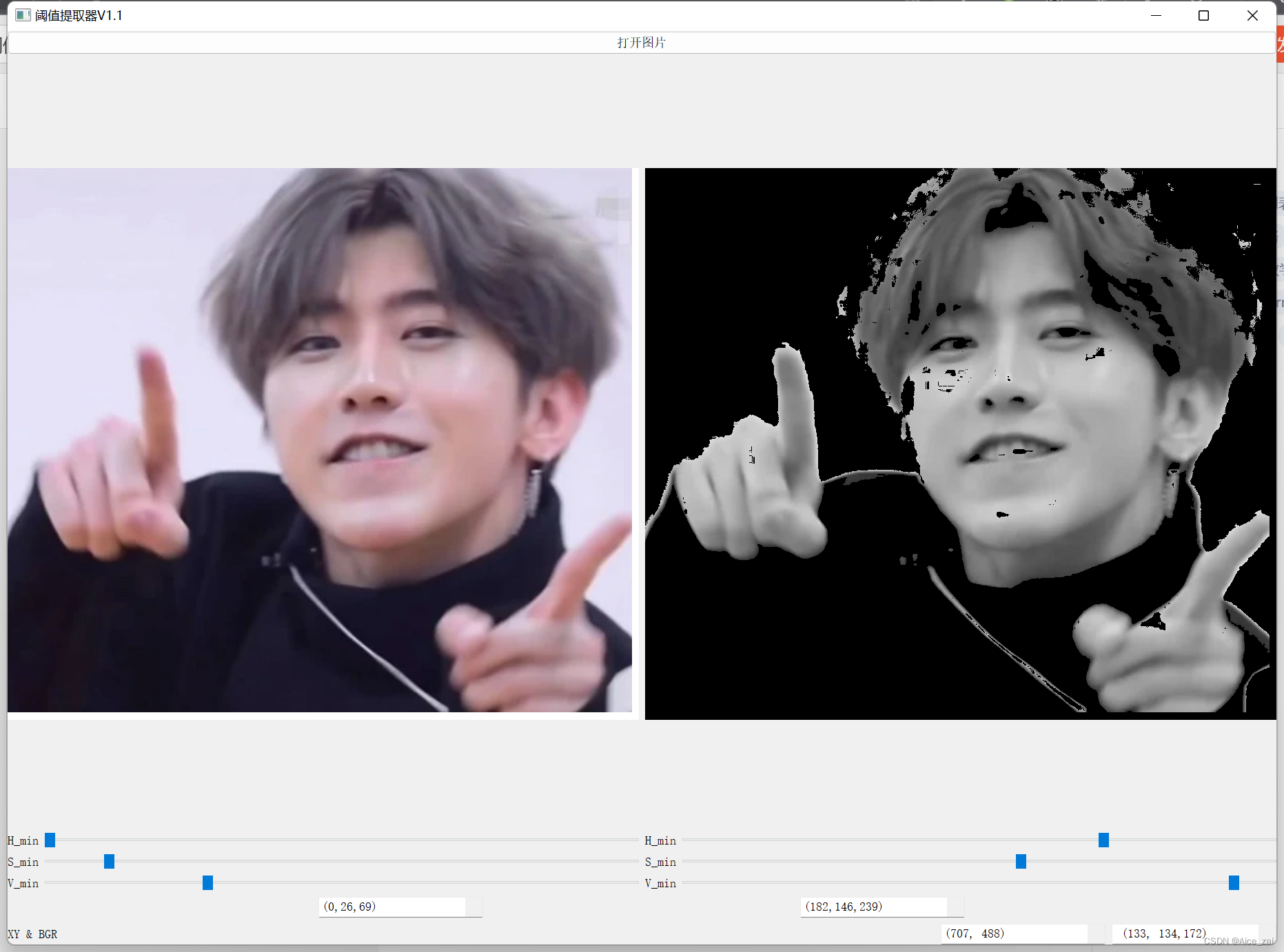
一、主要界面
二、主要功能
打开图片后通过滑块调整图像的最低最高HSV值,右侧显示经过Opencv掩膜算法处理过后的图像。
右下角显示鼠标所在像素点的BGR值和点坐标。
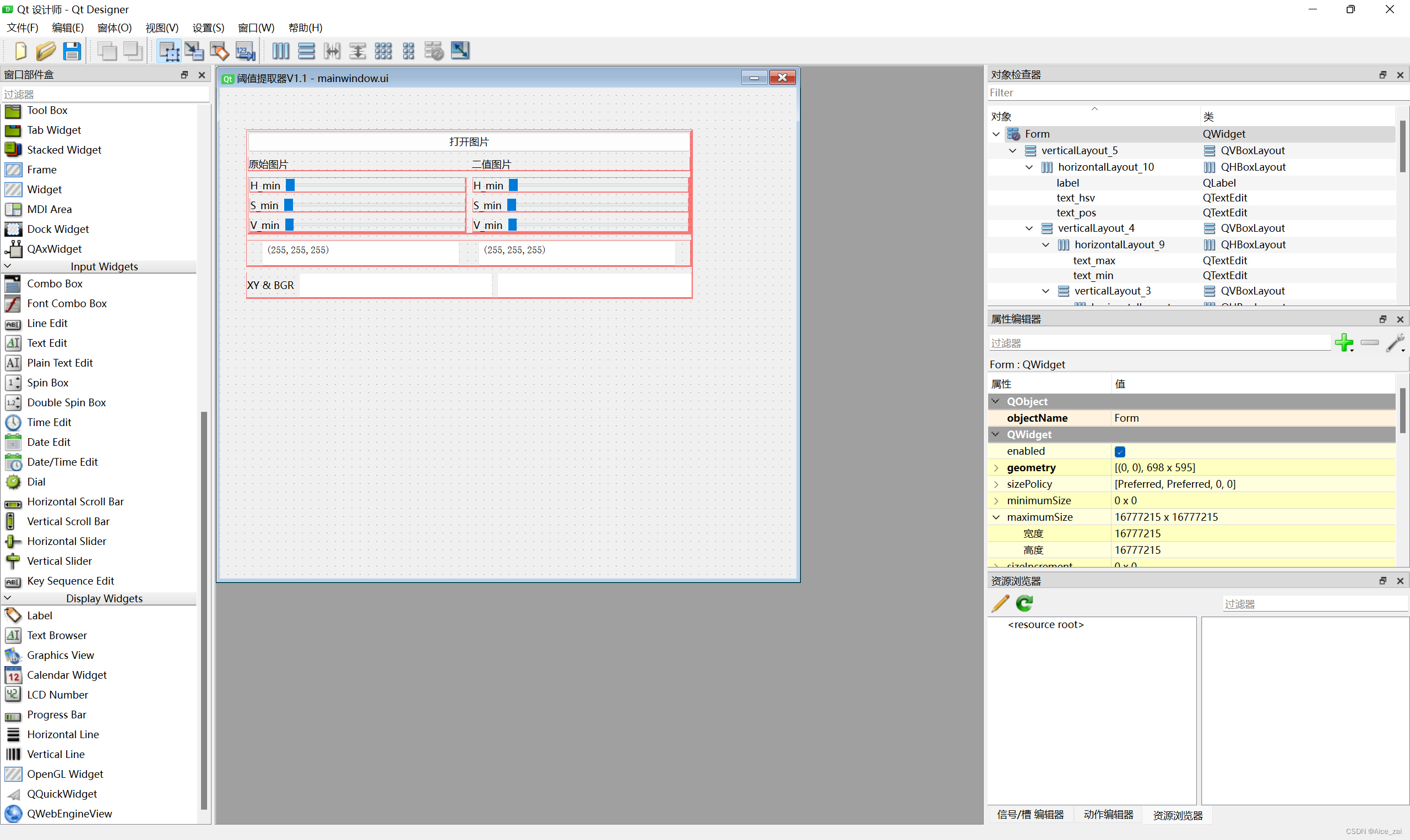
三、Designer界面
四、核心代码
实现右侧图片更新:
def update_mask(self):
# 获取滑块的值
min_h = self.slider_min_h.value()
min_s = self.slider_min_s.value()
min_v = self.slider_min_v.value()
max_h = self.slider_max_h.value()
max_s = self.slider_max_s.value()
max_v = self.slider_max_v.value()
# 创建掩膜
mask = cv2.inRange(self.img_hsv, np.array([min_h, min_s, min_v]), np.array([max_h, max_s, max_v]))
# 生成二值化图片
binary_img = cv2.bitwise_and(self.img_hsv, self.img_hsv, mask=mask)
binary_img = cv2.cvtColor(binary_img, cv2.COLOR_HSV2RGB)
binary_img = cv2.cvtColor(binary_img, cv2.COLOR_RGB2GRAY)
# 显示二值化图片
height, width = binary_img.shape
bytesPerLine = width
q_img = QtGui.QImage(binary_img.data, width, height, bytesPerLine, QtGui.QImage.Format_Grayscale8)
self.binary_label.setPixmap(QtGui.QPixmap.fromImage(q_img))
self.text_min.setText( "({},{},{})".format(min_h,min_s,min_v))
self.text_max.setText( "({},{},{})".format(max_h,max_s,max_v))
实现获取鼠标位置处信息:
def mouse_move_event(self, e):
if not self.pixmap:
return
pos = e.pos()
x = pos.x()
y = pos.y()
if x >= self.pixmap.width() or y >= self.pixmap.height():
return
color = self.pixmap.toImage().pixel(x, y)
b = color & 0xFF
g = (color >> 8) & 0xFF
r = (color >> 16) & 0xFF
self.text_pos.setText(f"({x}, {y})")
self.text_hsv.setText(f" ({b}, {g},{r})")

















 1239
1239

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









