







一、染上自动化离不开PID控制
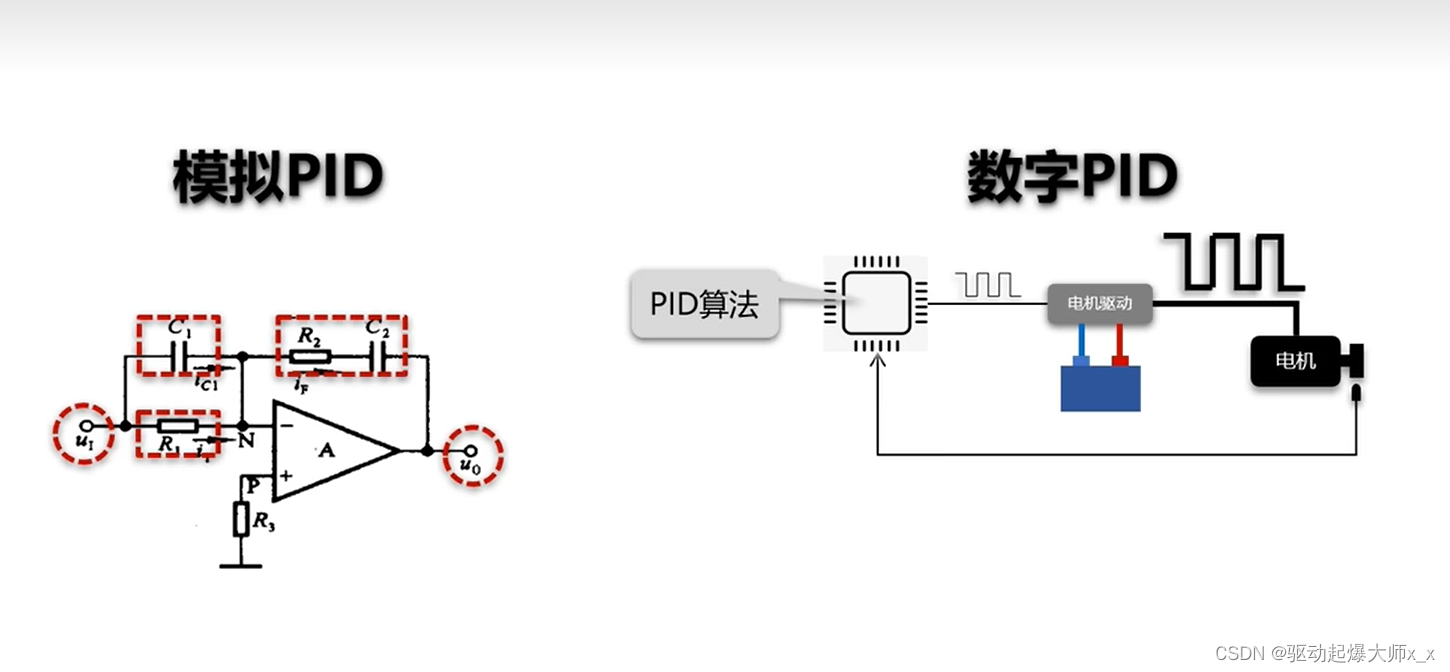
首先我们要对 模拟PID 和 数字PID 有一个基本的认识。下图中模拟PID就是通过一个模拟电路的方式通过RC的值调参实现的PID控制,这需要很多元器件很麻烦。而数字PID通过一个主控单片机使用编程的方式实现PID算法,我们通过调节代码的Kp KI Kd 值在修改参数,这也是目前最常用的方法,所以之后我们说的PID都默认数字PID。
二、数字PID公式的导出
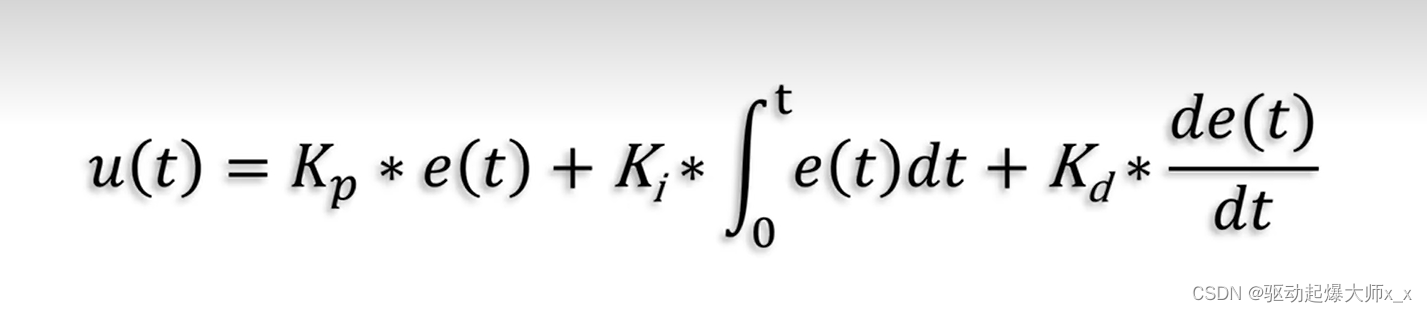
这是PID在连续时间下的表达式其中e(t)表示的是 误差 = 目标值 - 测量值。
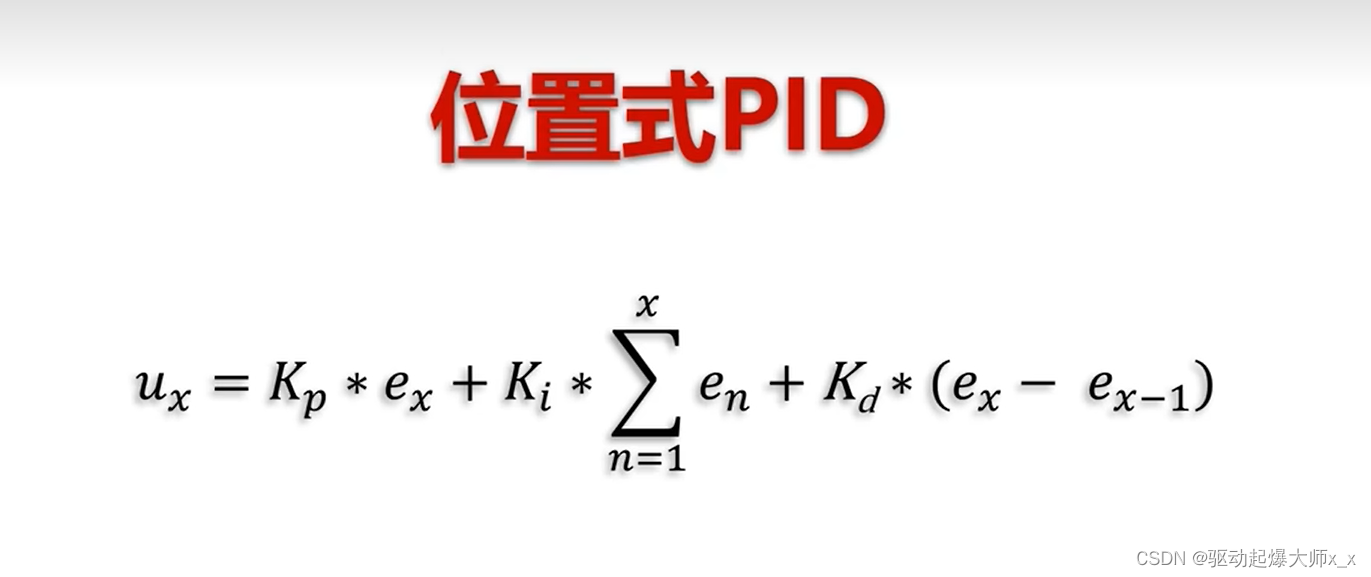
将上面的表达式离散化后我们就可以得到下面的PID在离散时间的表达式,也称为位置式PID。
将位置PID的x 和 x-1分别列出来后使用Ux - Ux-1 = △Ux
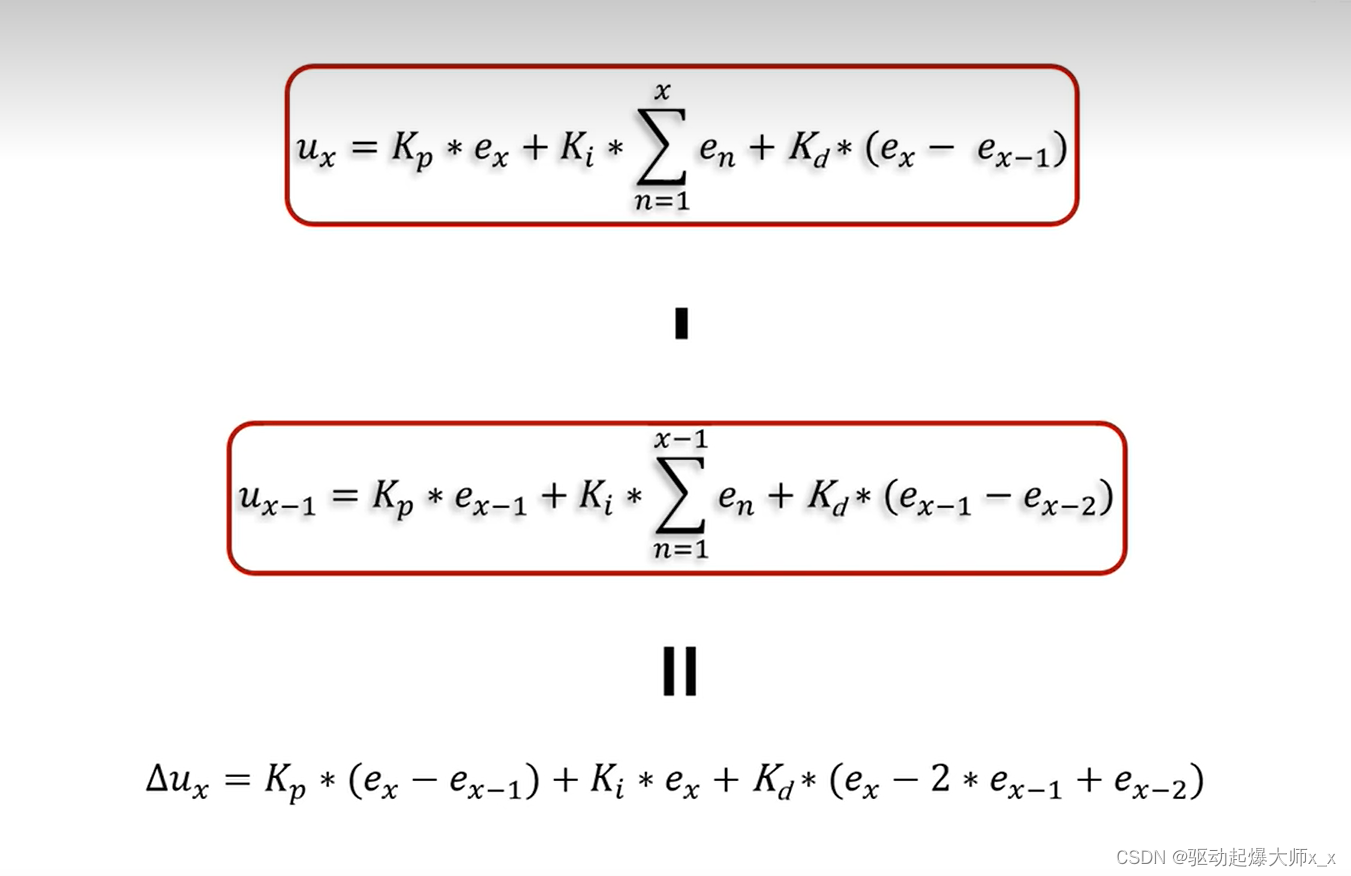
然后即可得到增量式的PID算法:Ux = Ux-1 + △Ux


















 5770
5770

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









