






外极几何
多视图几何是利用在不同视点所拍摄图像间的关系,来研究照相机之间或者特征之间关系的一门科学。图像的特征通常是兴趣点,多视图几何中最重要的内容是双视图几何。
如果有一个场景的两个视图以及视图中的对应图像点,那么根据照相机间的空间相对位置关系、照相机的性质以及三维场景点的位置,可以得到对这些图像点的一些几何关系约束。我们通过外极几何来描述这些几何关系。
利用照相机方程,可以将上述问题描述为:
λ
x
=
P
X
=
P
H
−
1
H
X
=
P
^
H
^
\lambda x=PX=PH^{-1}HX=\hat{P}\hat{H}
λx=PX=PH−1HX=P^H^
因此,当我们分析双视图几何关系时,总是可以将照相机间的相对位置关系用单应性矩阵加以简化。下面是一个好的做法:
P
1
=
K
1
[
I
∣
0
]
P_{1}=K_{1}\left [ I\mid 0 \right ]
P1=K1[I∣0]和
P
2
=
K
2
[
R
∣
t
]
P_{2}=K_{2}\left [ R \mid t \right ]
P2=K2[R∣t]
同一个图像点经过不同的投影矩阵产生的不同投影点必须满足:
x
2
T
F
x
1
=
0
x_{2}^{T}Fx_{1}=0
x2TFx1=0,其中,
F
=
K
2
−
T
S
t
R
K
1
−
1
F=K_{2}^{-T}S_{t}RK_{1}^{-1}
F=K2−TStRK1−1
一个简单的数据集
我们这里使用一个牛津多视图数据集;从http://www.robots.ox.ac.uk/~vgg/data/datamview.html 可以下载Merton1 数据的压缩文件。下面的脚本可以加载Merton1的数据:
import camera
# 载入一些图像
im1 = array(Image.open('images/001.jpg'))
im2 = array(Image.open('images/002.jpg'))
# 载入每个视图的二维点到列表中
points2D = [loadtxt('2D/00'+str(i+1)+'.corners').T for i in range(3)]
# 载入三维点
points3D = loadtxt('3D/p3d').T
# 载入对应
corr = genfromtxt('2D/nview-corners',dtype='int',missing='*')
# 载入照相机矩阵到Camera对象列表中
P = [camera.Camera(loadtxt('2D/00'+str(i+1)+'.P')) for i in range(3)]
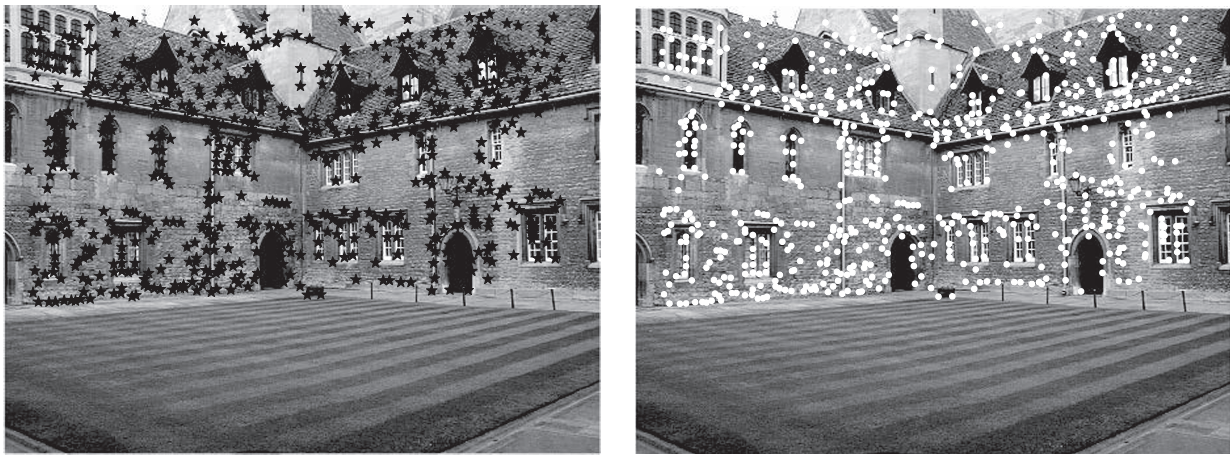
上面的程序会加载前两个图像(共三个)、三个视图中的所有图像特征点1、对应不同视图图像点重建后的三维点以及照相机参数矩阵。
下面来可视化这些数据。将三维的点投影到一个视图,然后和观测到的图像点比较:
# 将三维点转换成齐次坐标表示,并投影
X = vstack( (points3D,ones(points3D.shape[1])) )
x = P[0].project(X)
# 在视图1中绘制点
figure()
imshow(im1)
plot(points2D[0][0],points2D[0][1],'*')
axis('off')
figure()
imshow(im1)
plot(x[0],x[1],'r.')
axis('off')
show()
运行结果如下:
用Matplotlib绘制三维数据
Matplotlib中的mplot3d工具包可以方便地绘制出三维点、线、等轮廓线、表面以及其他基本图形组件,还可以通过图像窗口控件实现三维旋转和缩放。
可以通过在axes对象中加上projection="3d"关键字实现三维绘图,如下:
from mpl_toolkits.mplot3d import axes3d
fig = figure()
ax = fig.gca(projection="3d")
# 生成三维样本点
X,Y,Z = axes3d.get_test_data(0.25)
# 在三维中绘制点
ax.plot(X.flatten(),Y.flatten(),Z.flatten(),'o')
show()
结果如下:
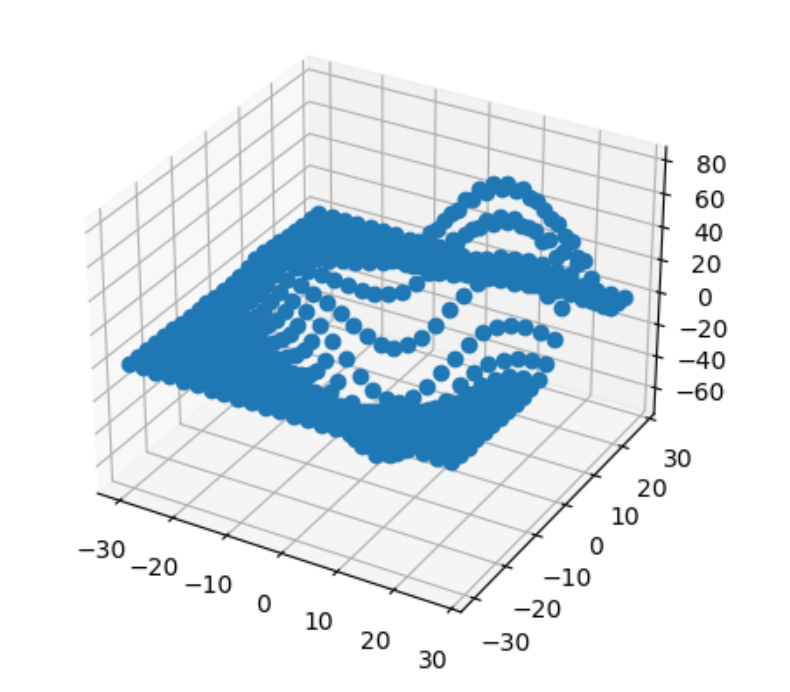
现在通过画出Merton样本数据来观察三维点的效果:
# 绘制三维点
from mpl_toolkits.mplot3d import axes3d
fig = figure()
ax = fig.gca(projection='3d')
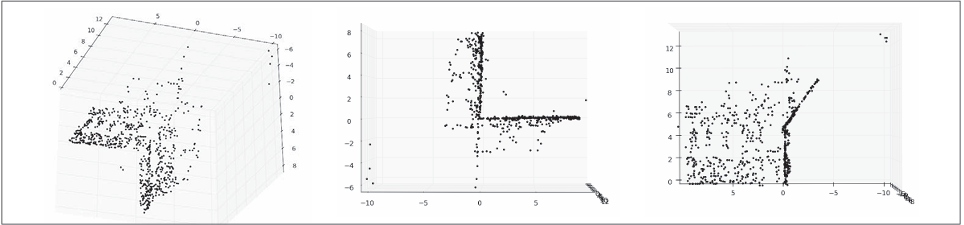
ax.plot(points3D[0],points3D[1],points3D[2],'k.')
下面是使用Matplottib工具包绘制的,牛津multi-view数据库中Mertoln1数据集的三维点:从上面和侧边观测的视图(左);俯视的视图,展示了建筑墙体和屋顶上的点(中);侧图,展示了一面墙的轮廓,以及另一面墙上点的主视图(右)
计算F:八点法
八点法是通过对应点来计算基础矩阵的算法。外极约束可写成下面形式:
[
x
2
1
x
1
1
x
2
1
y
1
1
x
2
1
w
1
1
⋯
w
2
1
w
1
1
x
2
2
x
1
2
x
2
2
y
1
2
x
2
2
w
1
2
⋯
w
2
2
w
1
2
⋮
⋮
⋮
⋱
⋮
x
2
n
x
1
n
x
2
n
y
1
n
x
2
n
w
1
n
⋯
w
2
n
w
1
n
]
[
F
11
F
12
F
13
⋮
F
33
]
=
A
f
=
0
\left[\begin{array}{ccccc}x_{2}^{1} x_{1}^{1} & x_{2}^{1} y_{1}^{1} & x_{2}^{1} w_{1}^{1} & \cdots & w_{2}^{1} w_{1}^{1} \\x_{2}^{2} x_{1}^{2} & x_{2}^{2} y_{1}^{2} & x_{2}^{2} w_{1}^{2} & \cdots & w_{2}^{2} w_{1}^{2} \\\vdots & \vdots & \vdots & \ddots & \vdots \\x_{2}^{n} x_{1}^{n} & x_{2}^{n} y_{1}^{n} & x_{2}^{n} w_{1}^{n} & \cdots & w_{2}^{n} w_{1}^{n}\end{array}\right]\left[\begin{array}{c}\boldsymbol{F}_{11} \\\boldsymbol{F}_{12} \\\boldsymbol{F}_{13} \\\vdots \\\boldsymbol{F}_{33}\end{array}\right]=\boldsymbol{A} \boldsymbol{f}=0
x21x11x22x12⋮x2nx1nx21y11x22y12⋮x2ny1nx21w11x22w12⋮x2nw1n⋯⋯⋱⋯w21w11w22w12⋮w2nw1n
F11F12F13⋮F33
=Af=0
基础矩阵中有9个元素,由于尺度是任意的,所以只需要8个方程。因为算法中需要8个对应点来计算基础矩阵F,所以该算法叫做八点法。
下面是写入下面八点法中最小化
∥
A
f
∥
\parallel Af\parallel
∥Af∥的函数:
def compute_fundamental(x1,x2):
"""使用归一化的八点算法,从对应点(x1,x2 3×n的数组)中计算基础矩阵
每行由如下构成:
[x'*x,x'*y' x', y'*x, y'*y, y', x, y, 1]"""
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
# 创建方程对应的矩阵
A = zeros((n,9))
for i in range(n):
A[i] = [x1[0,i]*x2[0,i], x1[0,i]*x2[1,i], x1[0,i]*x2[2,i],
x1[1,i]*x2[0,i], x1[1,i]*x2[1,i], x1[1,i]*x2[2,i],
x1[2,i]*x2[0,i], x1[2,i]*x2[1,i], x1[2,i]*x2[2,i] ]
# 计算线性最小二乘解
U,S,V = linalg.svd(A)
F = V[-1].reshape(3,3)
# 受限F
# 通过将最后一个奇异值置0,使秩为2
U,S,V = linalg.svd(F)
S[2] = 0
F = dot(U,dot(diag(S),V))
return F
通常用SVD算法来计算最小二乘解。上面的函数忽略了一个重要的步骤:对图像坐标
进行归一化,这可能会带来数值问题。
外极点和外极线
外极点满足 F e 1 = 0 Fe_{1}=0 Fe1=0,可以通过计算F的零空间来得到。使用下面函数可以得到:
def compute_epipole(F):
""" 从基础矩阵F中计算右极点(可以使用F.T获得左极点)"""
# 返回F的零空间(Fx=0)
U,S,V = linalg.svd(F)
e = V[-1]
return e/e[2]
我们可以在之前样本数据集的前两个视图上运行这两个函数:
import sfm
# 在前两个视图中点的索引
ndx = (corr[:,0]>=0) & (corr[:,1]>=0)
# 获得坐标,并将其用齐次坐标表示
x1 = points2D[0][:,corr[ndx,0]]
x1 = vstack( (x1,ones(x1.shape[1])) )
x2 = points2D[1][:,corr[ndx,1]]
x2 = vstack( (x2,ones(x2.shape[1])) )
# 计算F
F = sfm.compute_fundamental(x1,x2)
# 计算极点
e = sfm.compute_epipole(F)
# 绘制图像
figure()
imshow(im1)
# 分别绘制每条线,这样会绘制出很漂亮的颜色
for i in range(5):
sfm.plot_epipolar_line(im1,F,x2[:,i],e,False)
axis('off')
figure()
imshow(im2)
# 分别绘制每个点,这样会绘制出和线同样的颜色
for i in range(5):
plot(x2[0,i],x2[1,i],'o')
axis('off')
show()
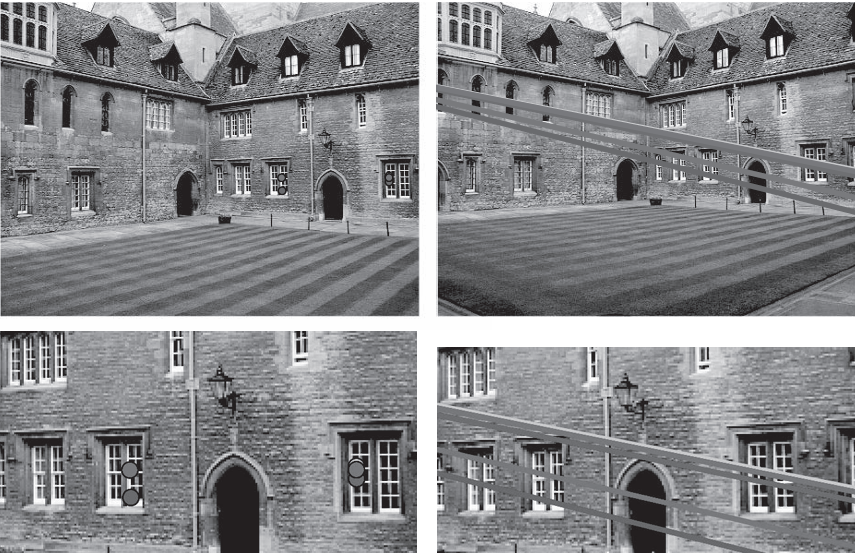
上面的函数将x轴的范围作为直线的参数,因此直线超出图像边界的部分会被截断。
程序运行如下:
照相机和三维结构的计算
三角剖分
给定照相机参数模型,图像点可以通过三角剖分来恢复出这些点的三维位置。基本的算法思想如下。
对于两个照相机P1和P2的视图,三维实物点X的投影点为x1和x2,照相机方程定义了下列关系:
[
P
1
−
x
1
0
P
2
0
−
x
2
]
[
X
λ
1
λ
2
]
=
0
\left[\begin{array}{ccc}P_{1} & -\mathbf{x}_{1} & 0 \\P_{2} & 0 & -\mathbf{x}_{2}\end{array}\right]\left[\begin{array}{l}\mathbf{X} \\\lambda_{1} \\\lambda_{2}\end{array}\right]=0
[P1P2−x100−x2]
Xλ1λ2
=0
下面使用一个函数来计算一个点对的最小二乘三角剖分
def triangulate_point(x1,x2,P1,P2):
""" 使用最小二乘解,绘制点对的三角剖分"""
M = zeros((6,6))
M[:3,:4] = P1
M[3:,:4] = P2
M[:3,4] = -x1
M[3:,5] = -x2
U,S,V = linalg.svd(M)
X = V[-1,:4]
return X / X[3]
可以增加下面的函数来实现多个点的三角剖分:
def triangulate(x1,x2,P1,P2):
""" x1 和 x2(3×n 的齐次坐标表示)中点的二视图三角剖分"""
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
X = [ triangulate_point(x1[:,i],x2[:,i],P1,P2) for i in range(n)]
return array(X).T
可以利用下面的代码来实现Merton1数据集上的三角剖分:
ndx = (corr[:,0]>=0) & (corr[:,1]>=0)
# 获取坐标,并用齐次坐标表示
x1 = points2D[0][:,corr[ndx,0]]
x1 = vstack( (x1,ones(x1.shape[1])) )
x2 = points2D[1][:,corr[ndx,1]]
x2 = vstack( (x2,ones(x2.shape[1])) )
Xtrue = points3D[:,ndx]
Xtrue = vstack( (Xtrue,ones(Xtrue.shape[1])) )
# 检查前三个点
Xest = sfm.triangulate(x1,x2,P[0].P,P[1].P)
print Xest[:,:3]
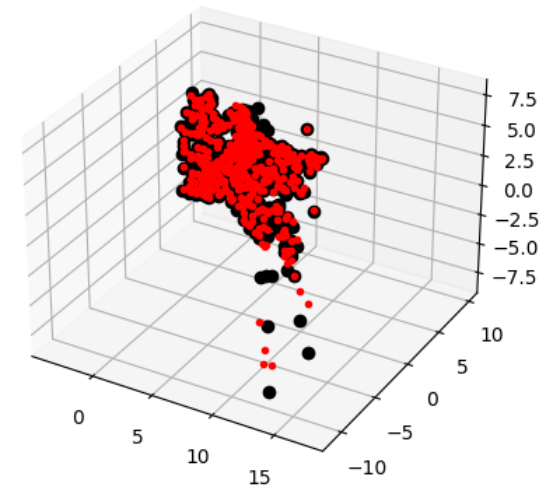
print Xtrue[:,:3]
# 绘制图像
from mpl_toolkits.mplot3d import axes3d
fig = figure()
ax = fig.gca(projection='3d')
ax.plot(Xest[0],Xest[1],Xest[2],'ko')
ax.plot(Xtrue[0],Xtrue[1],Xtrue[2],'r.')
axis('equal')
show()
运行结果如下:
由三维点计算照相机矩阵
我们可以使用直接线性变换的方法来计算照相机矩阵P。本质上,这是三角剖分方法的逆问题,有时我们将其称为照相机反切法。
每个三维点
X
i
X_{i}
Xi按照
λ
i
x
i
=
P
X
i
\lambda _{i} x_{i}=PX_{i}
λixi=PXi投影到图像点
x
i
=
[
x
i
,
y
i
,
1
]
x_{i}=\left [ x_{i},y_{i},1 \right ]
xi=[xi,yi,1],相应的点满足下面的关系: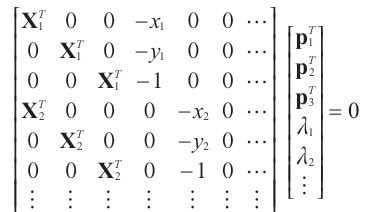
然后,我们可以使用SVD分解估计出照相机矩阵。代码如下
def compute_P(x,X):
""" 由二维- 三维对应对(齐次坐标表示)计算照相机矩阵"""
n = x.shape[1]
if X.shape[1] != n:
raise ValueError("Number of points don't match.")
# 创建用于计算DLT解的矩阵
M = zeros((3*n,12+n))
for i in range(n):
M[3*i,0:4] = X[:,i]
M[3*i+1,4:8] = X[:,i]
M[3*i+2,8:12] = X[:,i]
M[3*i:3*i+3,i+12] = -x[:,i]
U,S,V = linalg.svd(M)
return V[-1,:12].reshape((3,4))
下面的代码会选出第一个视图中的一些可见点,将它们转换为齐次坐标表示,然后估计照相机矩阵:
import sfm, camera
corr = corr[:,0] # 视图 1
ndx3D = where(corr>=0)[0] # 丢失的数值为-1
ndx2D = corr[ndx3D]
# 选取可见点,并用齐次坐标表示
x = points2D[0][:,ndx2D] # 视图 1
x = vstack( (x,ones(x.shape[1])) )
X = points3D[:,ndx3D]
X = vstack( (X,ones(X.shape[1])) )
# 估计P
Pest = camera.Camera(sfm.compute_P(x,X))
# 比较!
print Pest.P / Pest.P[2,3]
print P[0].P / P[0].P[2,3]
xest = Pest.project(X)
# 绘制图像
figure()
imshow(im1)
plot(x[0],x[1],'bo')
plot(xest[0],xest[1],'r.')
axis('off')
show()
输出如下:
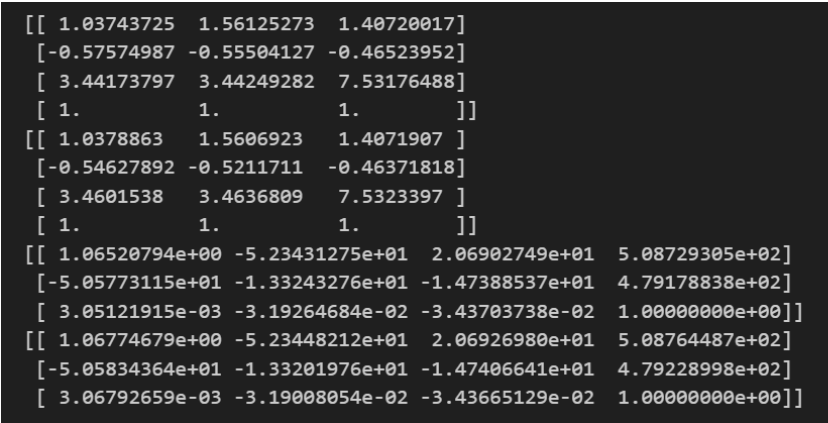

真实点用圆圈表示,估计出的照相机投影点用点表示。
多视图重建
假设照相机已经标定,计算重建可以分为下面4个步骤:
(1) 检测特征点,然后在两幅图像间匹配;
(2) 由匹配计算基础矩阵;
(3) 由基础矩阵计算照相机矩阵;
(4) 三角剖分这些三维点。
稳健估计基础矩阵
代码如下:
class RansacModel(object):
""" 用从 http://www.scipy.org/Cookbook/RANSAC 下载的 ransac.py 计算基础矩阵的类 """
def __init__(self,debug=False):
self.debug = debug
def fit(self,data):
""" 使用选择的 8 个对应计算基础矩阵"""
# 转置,并将数据分成两个点集
data = data.T
x1 = data[:3,:8]
x2 = data[3:,:8]
#估计基础矩阵,并返回
F = compute_fundamental_normalized(x1,x2)
return F
def get_error(self,data,F):
""" 计算所有对应的 x^T F x,并返回每个变换后点的误差"""
# 转置,并将数据分成两个点集
data = data.T
x1 = data[:3]
x2 = data[3:]
# 将Sampson 距离用作误差度量
Fx1 = dot(F,x1)
Fx2 = dot(F,x2)
denom = Fx1[0]**2 + Fx1[1]**2 + Fx2[0]**2 + Fx2[1]**2
err = ( diag(dot(x1.T,dot(F,x2))) )**2 / denom
# 返回每个点的误差
return err



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











