






Luckfox RV1106搭建qt环境
相关资料
材料选择
| 物品 | 淘宝链接 |
|---|---|
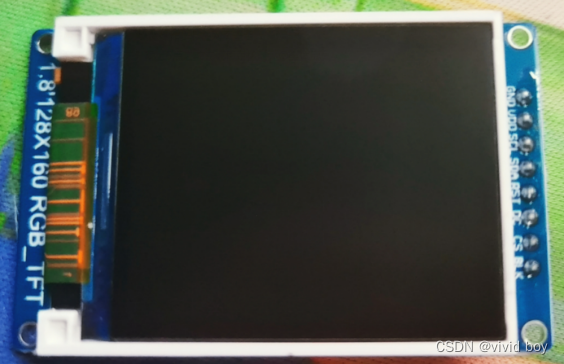
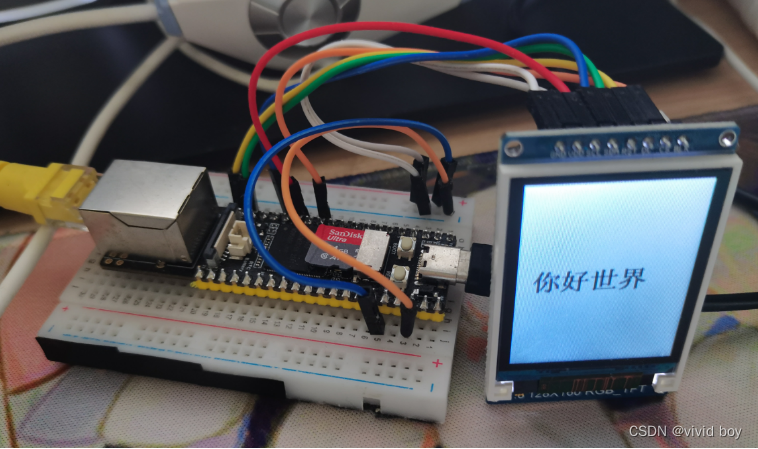
| st7735 1.8寸 | https://item.taobao.com/item.htm?id=583173435654 |
| sd/tf卡 | 自行购买 |
| usb转typec | 自行购买 |
| 网线 | 自行购买 |
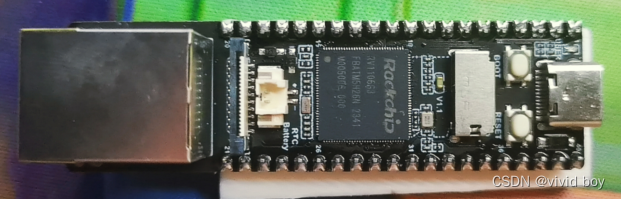
| 辛狐RV1106 Pro Max | https://item.taobao.com/item.htm?id=740872477147 |
SDK环境搭建
- Ubuntu22.04下配置环境
# 更新软件源
sudo apt update
# 安装需要的环境
sudo apt-get install -y git ssh make gcc gcc-multilib g++-multilib module-assistant expect g++ gawk texinfo libssl-dev bison flex fakeroot cmake unzip gperf autoconf device-tree-compiler libncurses5-dev pkg-config bc python-is-python3 passwd openssl openssh-server openssh-client vim file cpio rsync
# 下载SDK
cd Code
git clone https://gitee.com/LuckfoxTECH/luckfox-pico.git
cd luckfox-pico
# 修改配置文件安装buildroot系统
vim project/cfg/BoardConfig_IPC/BoardConfig-SPI_NAND-Buildroot-RV1106_Luckfox_Pico_Pro_Max-IPC.mk
`
export LF_TARGET_ROOTFS=buildroot
`
# 安装交叉编译工具链
source tools/linux/toolchain/arm-rockchip830-linux-uclibcgnueabihf/env_install_toolchain.sh
# 添加环境变量
vim ~/.bashrc
`
export PATH=~/Code/luckfox-pico/bin:$PATH
export PATH=~/Code/luckfox-pico/tools/linux/toolchain/arm-rockchip830-linux-uclibcgnueabihf/bin:$PATH
`
source ~/.bashrc
# 编译busybox/buildroot(第一次很慢)
echo 8 | ./build.sh lunch
./build.sh
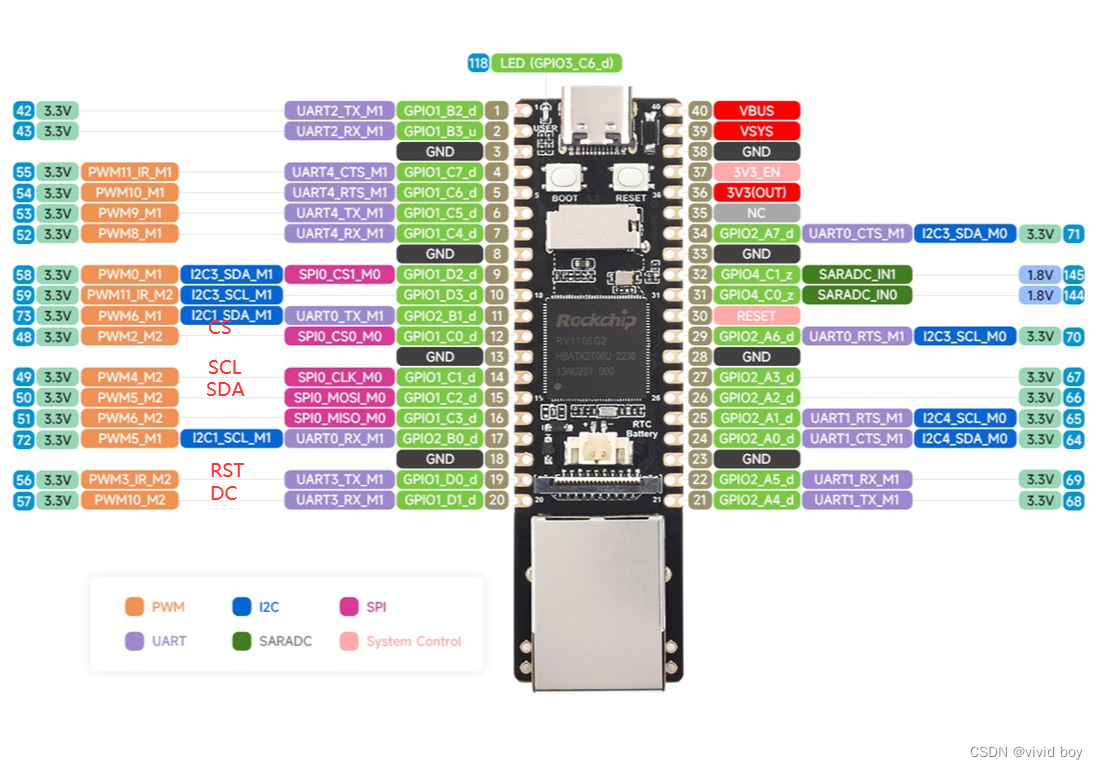
设备树搭建
- 挂载 SD 卡
vim sysdrv/source/kernel/arch/arm/boot/dts/rv1103g-luckfox-pico-plus.dts
`
/**********SDMMC**********/
&sdmmc {
max-frequency = <50000000>;
no-sdio;
no-mmc;
bus-width = <4>;
cap-mmc-highspeed;
cap-sd-highspeed;
disable-wp;
pinctrl-names = "default";
pinctrl-0 = <&sdmmc0_clk &sdmmc0_cmd &sdmmc0_det &sdmmc0_bus4>;
status = "okay";
};
`
- 挂载屏幕驱动spi
// 注释usart3
//&uart3 {
// status = "okay";
// pinctrl-names = "default";
// pinctrl-0 = <&uart3m1_xfer>;
//};
/ {
model = "Luckfox Pico Max";
compatible = "rockchip,rv1103g-38x38-ipc-v10", "rockchip,rv1106";
gpio1rstgpios:gpio1rstgpios {
compatible = "regulator-fixed";
pinctrl-names = "default";
pinctrl-0 = <&gpio1_rst_gpios>;
regulator-name = "gpio1-rst-gpios";
regulator-always-on;
};
gpio1dcgpios:gpio1dcgpios {
compatible = "regulator-fixed";
pinctrl-names = "default";
pinctrl-0 = <&gpio1_dc_gpios>;
regulator-name = "gpio1-dc-gpios";
regulator-always-on;
};
};
&pinctrl {
gpio1_rst_gpios {
gpio1_rst_gpios:gpio1_rst_gpios {
rockchip,pins = <1 RK_PD0 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
gpio1_dc_gpios {
gpio1_dc_gpios:gpio1_dc_gpios {
rockchip,pins = <1 RK_PD1 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
};
// /**********SPI**********/
&spi0 {
status = "okay";
pinctrl-names = "default";
pinctrl-0 = <&spi0m0_pins>;
cs-gpios = <&gpio1 RK_PC0 1>;
// cs-gpios = <&gpio1 26 1>;
#address-cells = <1>;
#size-cells = <0>;
st7735s: st7735s@0 {
compatible = "sitronix,st7735r";
status = "okay";
spi-max-frequency = <48000000>;
reg = <0>;
reset = <&gpio1 RK_PD0 1>; // 复位引脚
dc = <&gpio1 RK_PD1 1>; // 数据/命令引脚
rotation = <90>; // 屏幕旋转90度
buswidth = <8>; // 总线的宽度
fps = <30>;
spi-cpol;
spi-cpha;
rgb;
};
};
内核配置
# 进入到内核目录
cd sysdrv/source/kernel/
# 移动官方rv1106配置文件
cp ./arch/arm/configs/luckfox_rv1106_linux_defconfig .config
# 进入配置页面
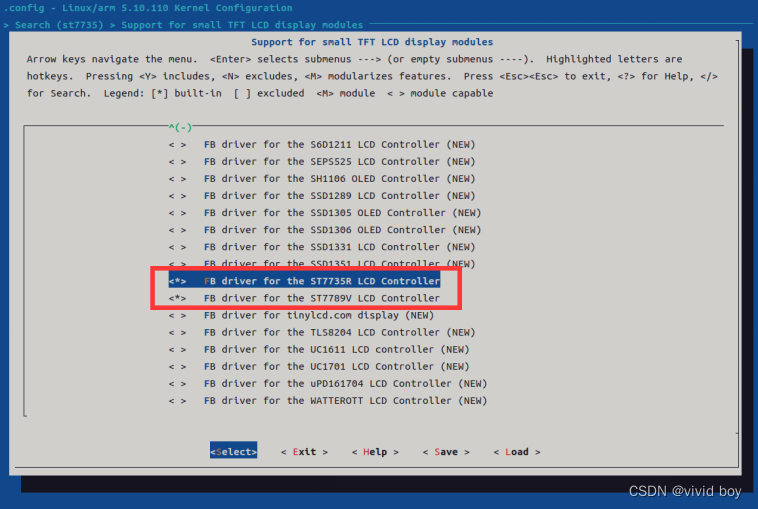
make ARCH=arm menuconfig
按下’/'搜索st7735驱动,输入1进入
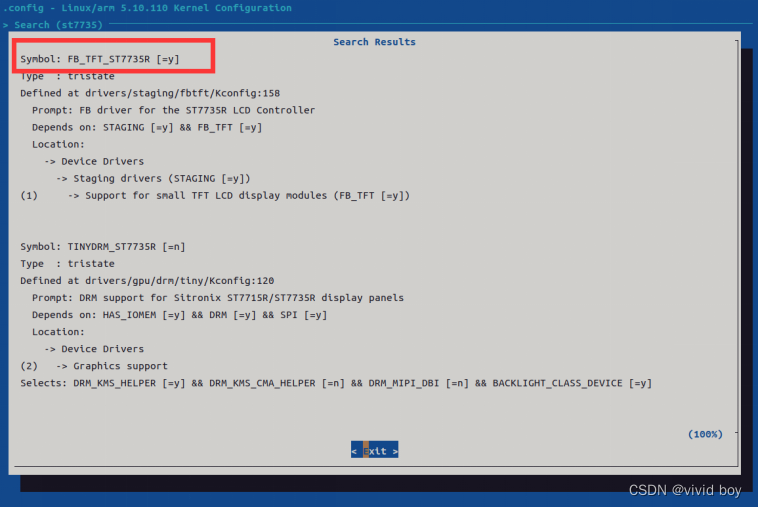
输入y选中后save保存
make ARCH=arm savedefconfig
cp defconfig ./arch/arm/configs/luckfox_rv1106_linux_defconfig
Buildroot 配置
- 配置qt,按下’/'搜索qt5
cd sysdrv/source/buildroot/buildroot-2023.02.6/
make luckfox_pico_defconfig
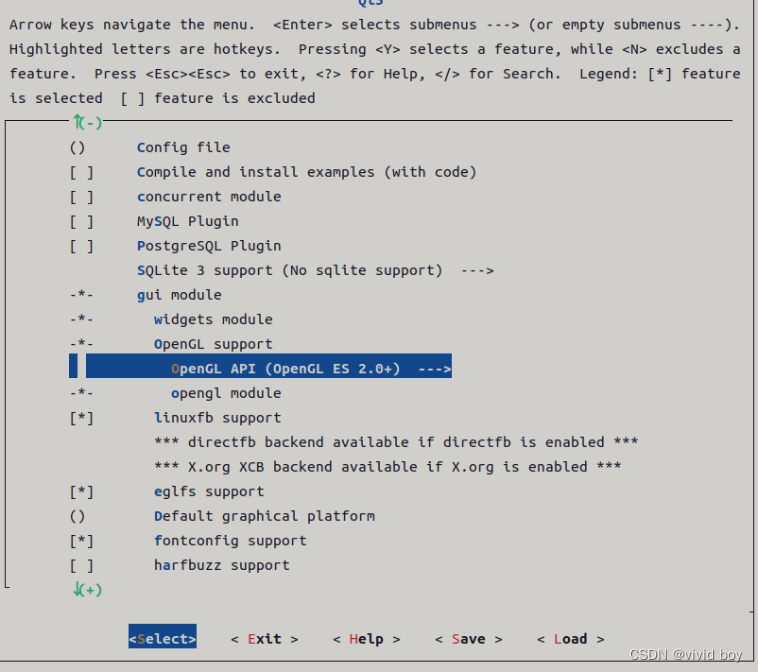
make menuconfig
`
-*- qt5base
-*- gui module
[*] widgets module
*** OpenGL support needs an OpenGL-capable backend ***
-*- linuxfb support
*** directfb backend available if directfb is enabled ***
*** X.org XCB backend available if X.org is enabled ***
*** eglfs backend available if OpenGL and EGL are enabled ***
[*] fontconfig support
[*] GIF support
[*] JPEG support
[*] PNG support
[*] Enable Tslib support
[*] qt5multimedia
[*] qjson
`
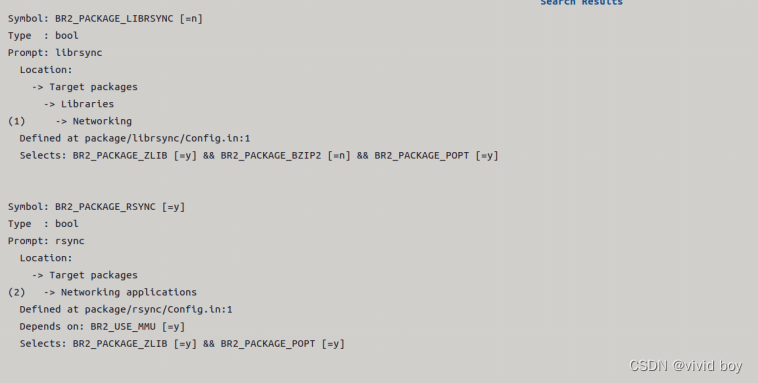
- 安装rsync(2)
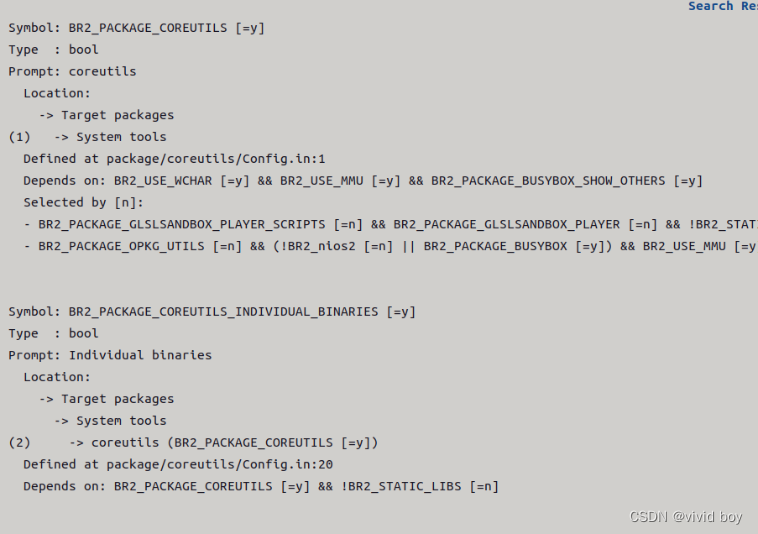
- 安装coreutils(1,2)
- 安装opengl,eglfs
`
Target packages
->Libraries
->Graphics
->libdrm
->etnaviv--支持的GPU驱动。
->Install test programs--libdrm测试程序。
-> Graphic libraries and applications (graphic/text)
->mesa3d
->Gallium Etnaviv driver--Vivante GPU的Mesa驱动。
->Gallium swrast driver--基于Gallium3D架构实现的软件OpenGL。
->gbm--使能Generic Buffer Management。
->OpenGL EGL--EGL是OpenGL ES和底层Native平台视窗系统之间的接口。
->OpenGL ES--OpenGL ES (OpenGL for Embedded Systems)。
`
- 编译
make savedefconfig
make
# 生成软件开发工具包
make sdk
# 添加qmake环境变量
vim ~/.bashrc
`
export PATH=~/Code/luckfox-pico/sysdrv/source/buildroot/buildroot-2023.02.6/output/build/qt5base-2ffb7ad8a1079a0444b9c72affe3d19b089b60de/qmake:$PATH
`
source ~/.bashrc
烧录
echo 8 | ./build.sh lunch
./build.sh
移动output/image到windows下
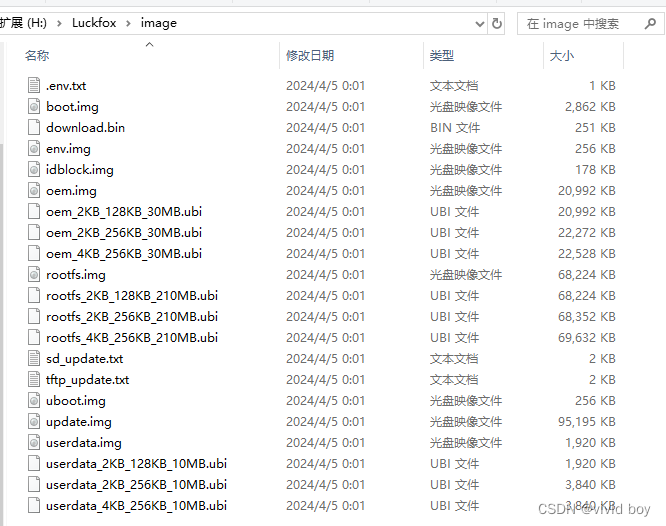
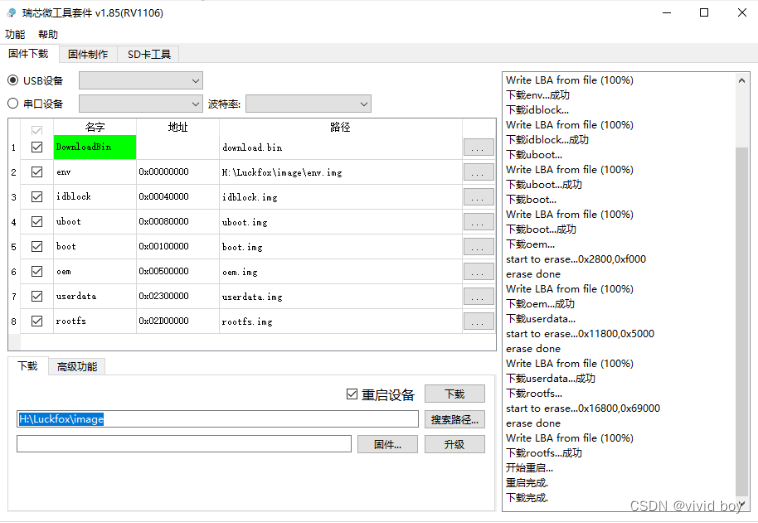
烧录程序,详细见官网
qt环境如下(过时不具备参考意义)
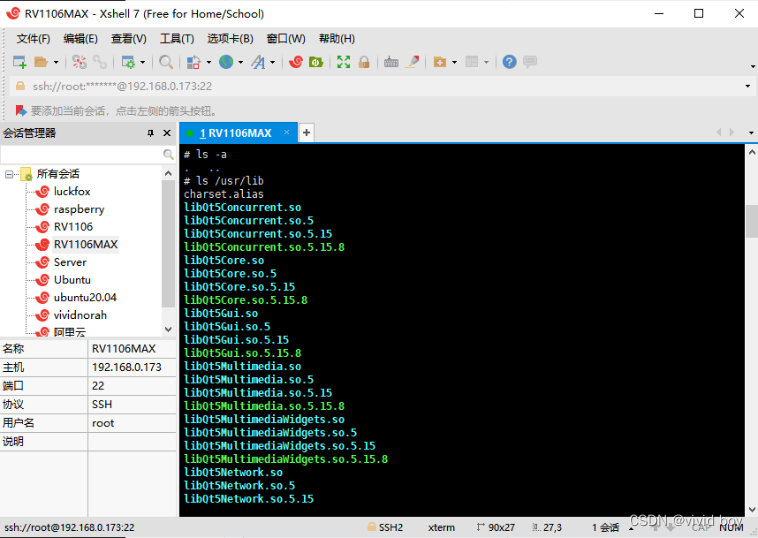
配置环境(buildroot 下)
- qt环境(buildroot 下)
vi /etc/profile
`
export QT_QPA_PLATFORM_PLUGIN_PATH=/usr/lib/
export QT_QPA_PLATFORM=linuxfb:tty=/dev/fb0
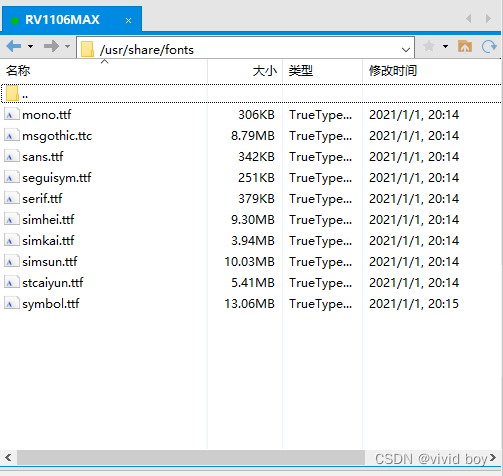
export QT_QPA_FONTDIR=/usr/share/fonts
export QT_QPA_GENERIC_PLUGINS=tslib:$TSLIB_TSDEVICE
`
source /etc/profile
- 添加字库(添加一个即可)
链接:https://pan.baidu.com/s/1MorzYf0-3IT9byPAxWXCrg?pwd=ynwu
提取码:ynwu
- 启动样例程序(buildroot 下)
./analogclock -platform linuxfb
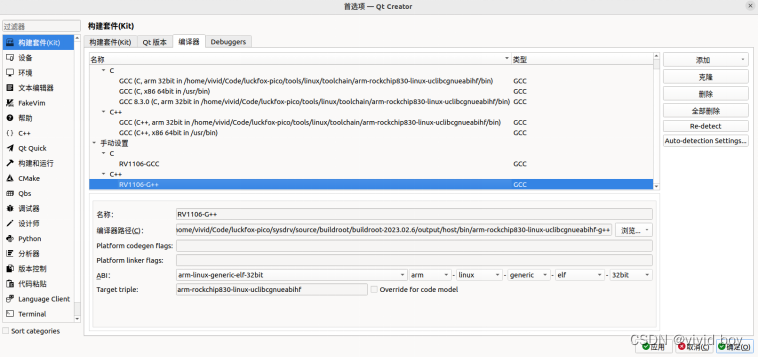
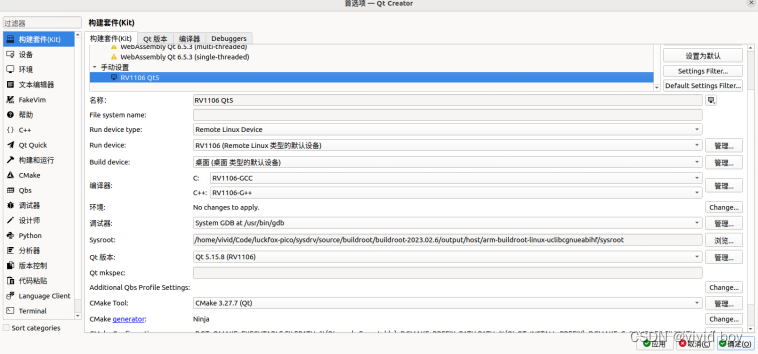
QT配置
# gcc路径
sysdrv/source/buildroot/buildroot-2023.02.6/output/host/bin/arm-rockchip830-linux-uclibcgnueabihf-gcc
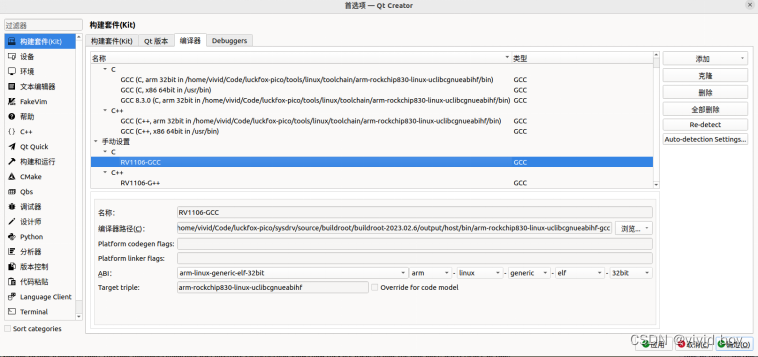
# g++路径
sysdrv/source/buildroot/buildroot-2023.02.6/output/host/bin/arm-rockchip830-linux-uclibcgnueabihf-g++
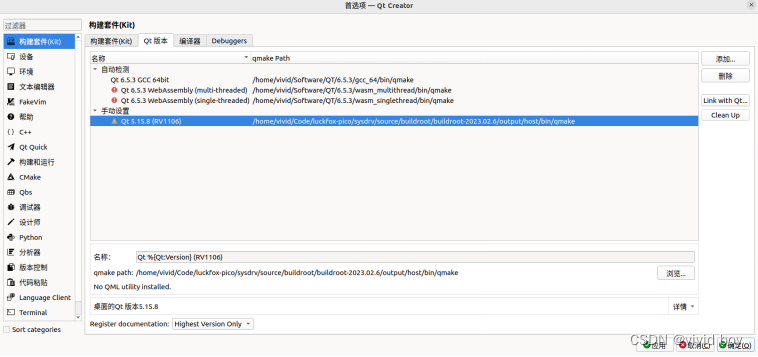
# qmake路径
sysdrv/source/buildroot/buildroot-2023.02.6/output/host/bin/qmake
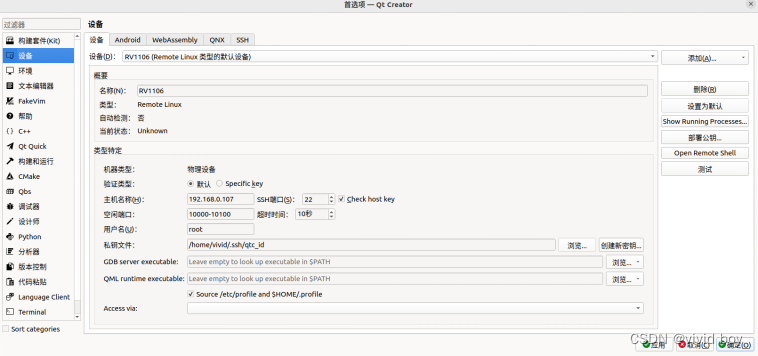
# 配置设备(确保测试通过)
# sysroot路径
sysdrv/source/buildroot/buildroot-2023.02.6/output/host/arm-buildroot-linux-uclibcgnueabihf/sysroot
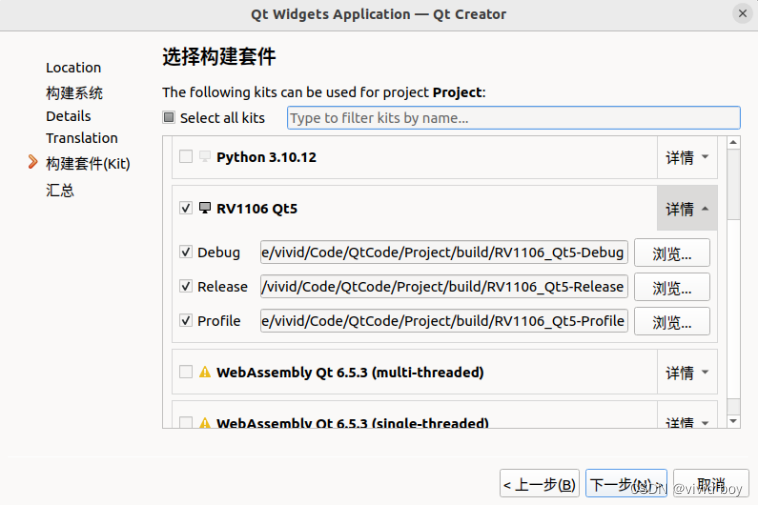
创建项目
修改pro文件
target.path = /root
INSTALLS += target
这步骤暂定不需要
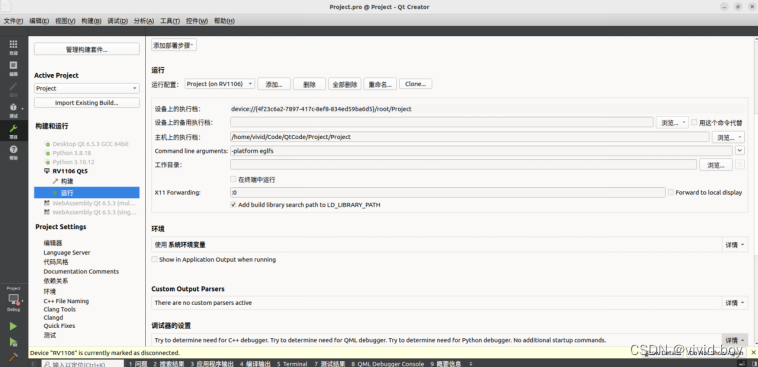
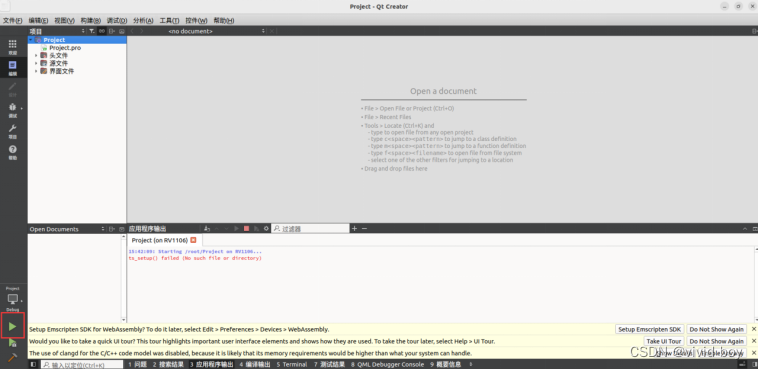
启动项目
点击启动按钮同步在开发板执行,并且将执行文件保存到root下

















 804
804

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









