



翻到以前实习的时候给小公司做的临时测试集成程序,人生中第一个商用作品,虽然只找到了半成品,留个纪念。
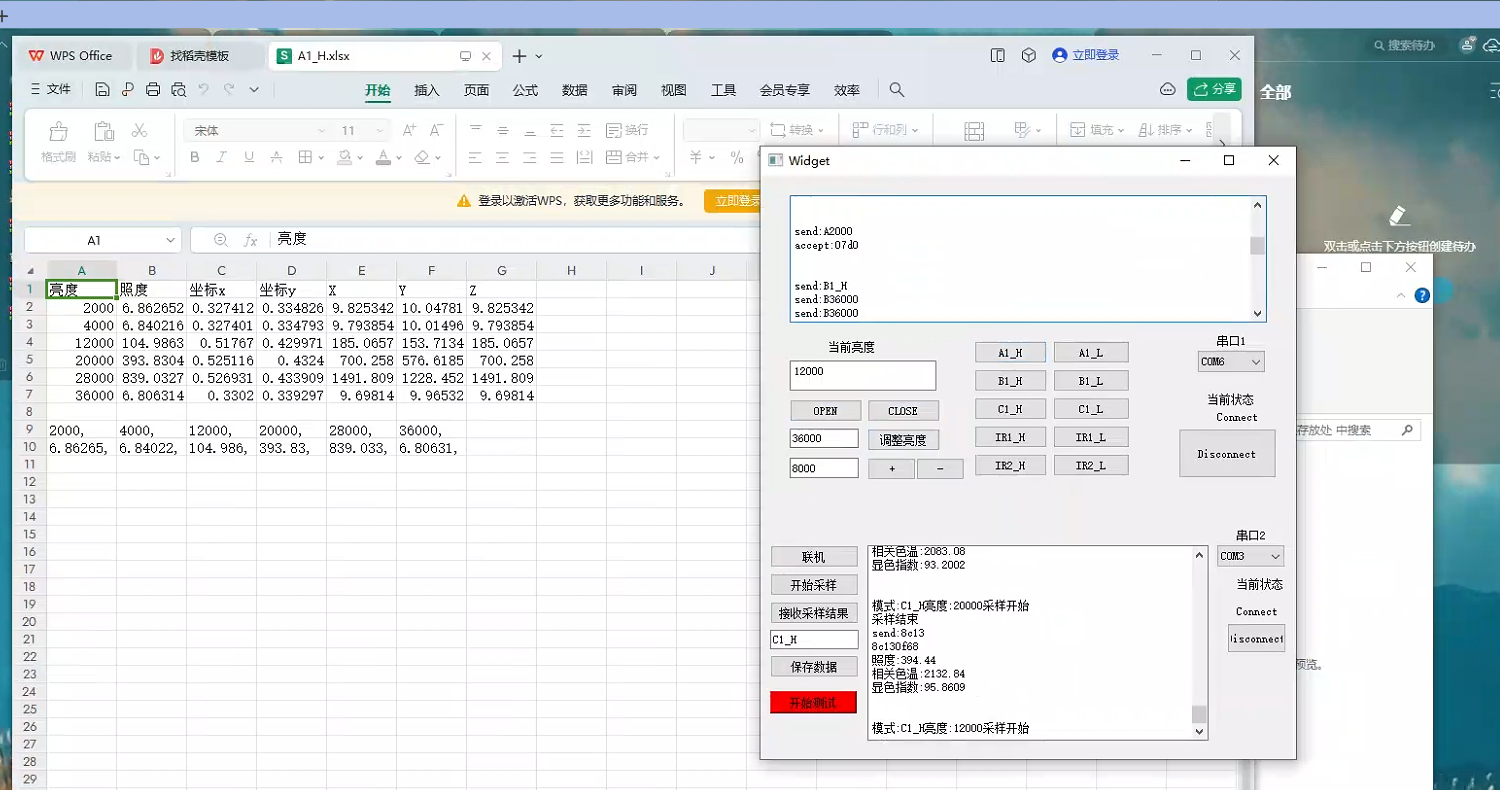
1.0实现了串口通信,串口下位机设备控制,自动测试逻辑实现光,谱仪数据解码处理,csv的io操作,保留了手动控制接口。
可惜只找到了0.5的源码
翻到以前实习的时候给小公司做的临时测试集成程序,人生中第一个商用作品,虽然只找到了半成品,留个纪念。
1.0实现了串口通信,串口下位机设备控制,自动测试逻辑实现光,谱仪数据解码处理,csv的io操作,保留了手动控制接口。
可惜只找到了0.5的源码
 3238
730
5454
3238
730
5454

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























