







如果有用请点赞,还会继续更新的
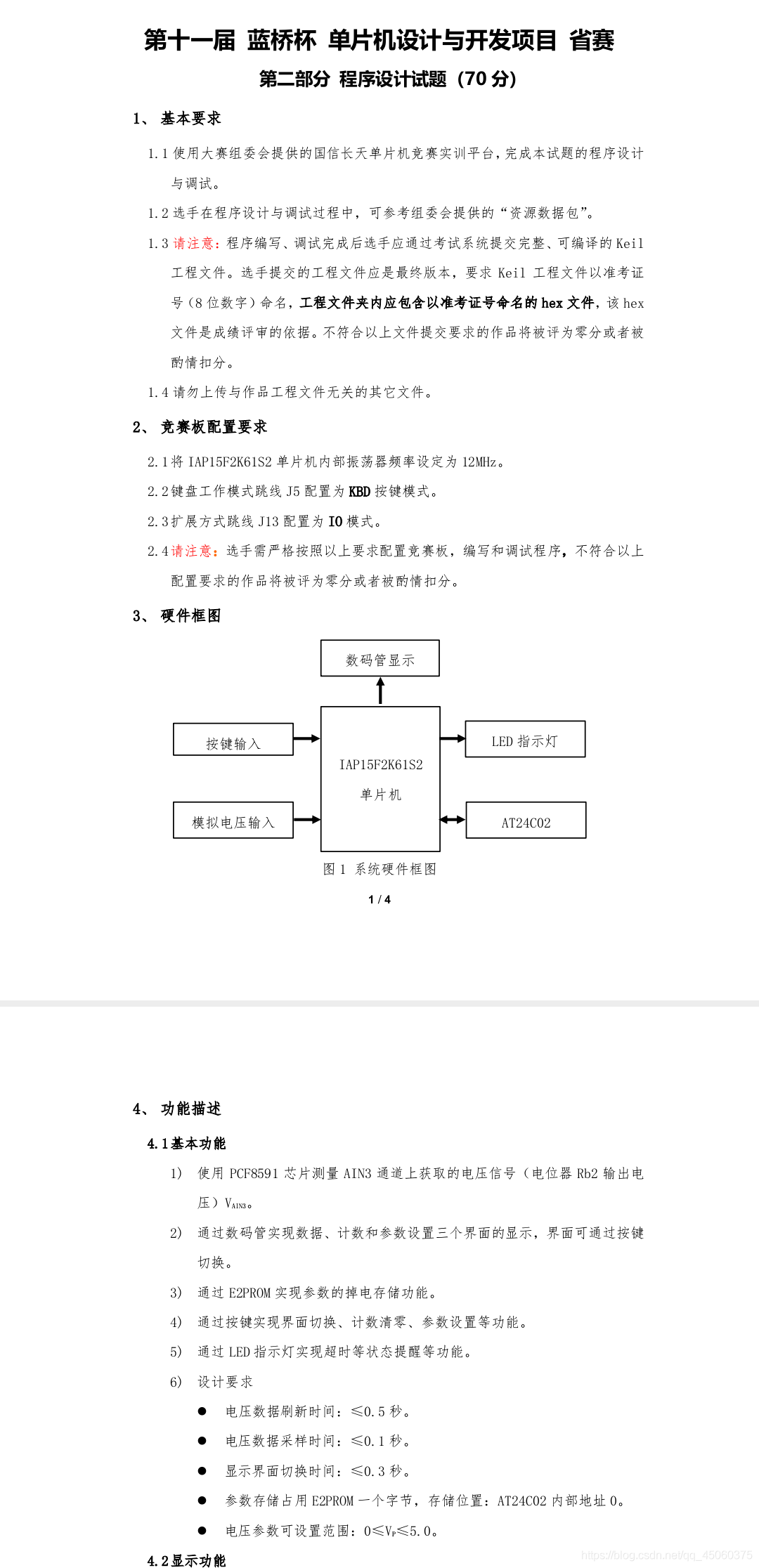
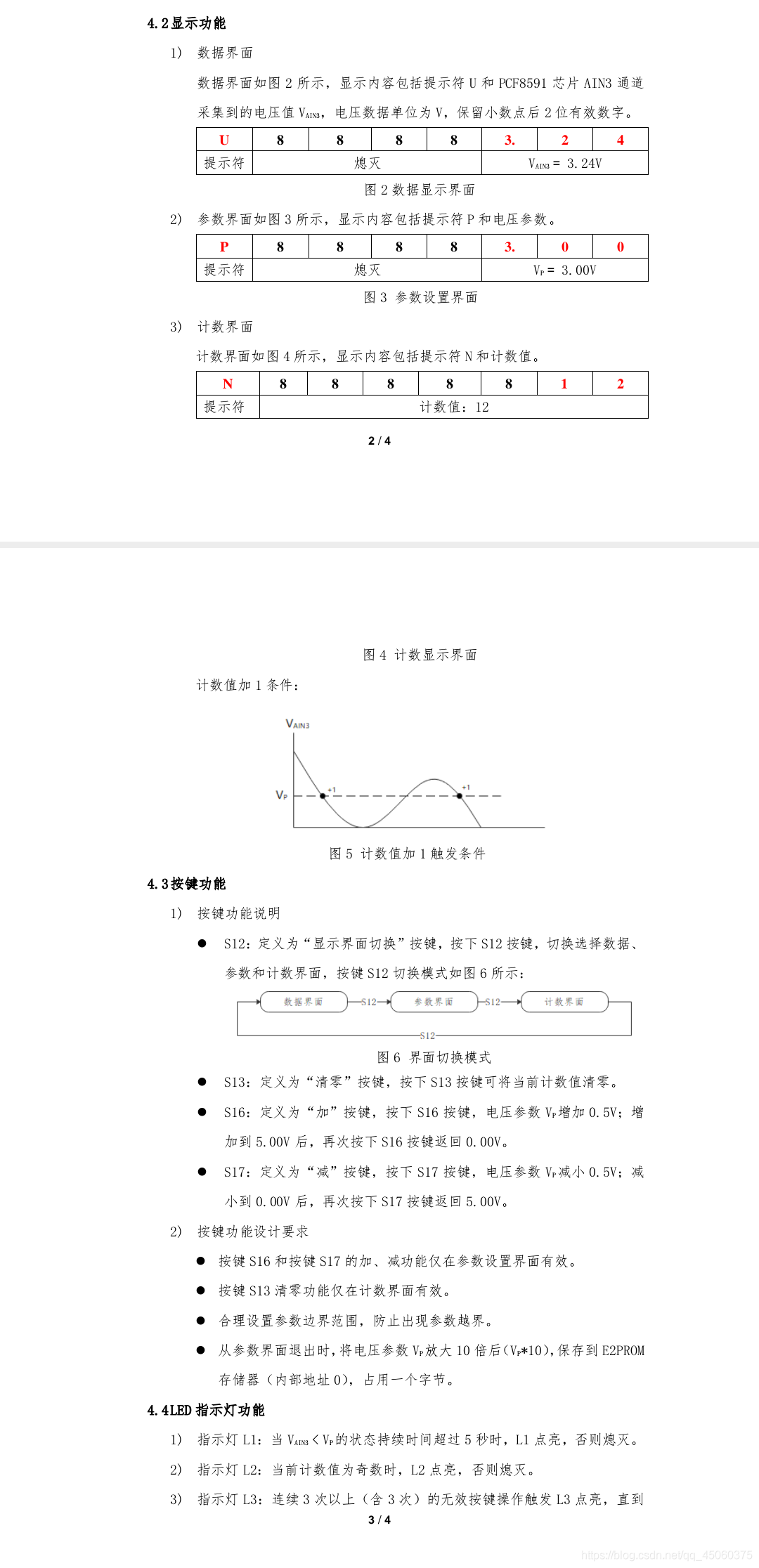
题目:
思路:
首先就是这个EEPROM掉电存储,这个可以看我的另外一篇博客,然后就是DA转换,和EEPROM一样,都要使用到iic总线技术,其次就是LED指示灯的使用,我觉得直接用P0来操作肯定是不行的,毕竟程序中有很多都是用了P0,所以我重新定义了一个led 的专属变量led_work用来储存led变量,通过与非来准确的控制变量。然后就是持续超过5秒L1亮,我才用了定时中断技术,同时DA的数据更新也用到了定时中断技术,最后就是无效按键出发L3,我定义了一个变量error_time来统计错误的次数,同时,每个有效的按键中,我都有让error_time为0的代码,从而来实现效果。还有就是计数,现在还是有点点小错误,有的时候还是有点识别不到,大家可以自行调整一下间断时间(总而言之,我觉得这是我写过最难得一个了,那个LED指示灯简直让我抓狂)
源代码:
main.c
#include"reg52.h"
#include"intrins.h"
#include"iic.h"
sfr P4=0xC0;
sbit R1=P3^0;
sbit R2=P3^1;
sbit R3=P3^2;
sbit R4=P3^3;
sbit C4=P3^4;
sbit C3=P3^5;
sbit C2=P4^2;
sbit C1=P4^4;
sbit L2=P0^1;
char code xianshi[15]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff,0x7f,0xc1,0x8c,0xc8};
sfr AUXR=0x8e;
int v_temp=0;
int smg_mode=0;
int v_number=0;
int count_v=0;
int set_v=200;
int add=0x00;
int error_time=0;
int led_work=0xff;
void get_v()
{
v_number=read_v();
v_number=v_number*1.96+0.5;
}
void choose_573(int i)
{
switch(i)
{
case(0):P2=(P2&0x1f)|0x00;break;
case(4):P2=(P2&0x1f)|0x80;break;
case(5):P2=(P2&0x1f)|0xa0;break;
case(6):P2=(P2&0x1f)|0xc0;break;
case(7):P2=(P2&0x1f)|0xe0;break;
}
}
void init_system()
{
choose_573(4);
P0=0xff;
choose_573(5);
P0=0x00;
choose_573(0);
P0=0xff;
}
//===================================定时器
void Timer0Init(void) //5毫秒@11.0592MHz
{
AUXR |= 0x80; //定时器时钟1T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0x00; //设置定时初始值
TH0 = 0x28; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ET0=1;
EA=1;
}
int count;int count_1;int count_2;
void Timer0_server() interrupt 1
{
count++;
count_1++;
if(count>=20)
{
get_v();
count=0;
}
if(count_1>=100)
{
v_temp=v_number;
count_1=0;
}
//============
if(v_number<set_v)
{
count_2++;
if(count_2>=1000)
{
led_work=(led_work&0xfe)|0x00;
choose_573(4);
P0=led_work;
choose_573(0);
count_2=0;
}
}
else
{
count_2=0;
led_work=(led_work&0xfe)|0x01;
choose_573(4);
P0=led_work;
choose_573(0);
}
}
//===================================
//===================================按键
void Delay5ms() //@11.0592MHz
{
unsigned char i, j;
i = 54;
j = 199;
do
{
while (--j);
} while (--i);
}
void key_board()
{
R3=0;R1=R2=R4=1;
C1=C2=C3=C4=1;
if(C3==0&&smg_mode==2)
{
Delay5ms();
if(C3==0&&smg_mode==2)
{
error_time=0;
count_v=0;
}
while(!C3);
}
if(C3==0&&smg_mode!=2)
{
Delay5ms();
if(C3==0&&smg_mode!=2)
{
error_time++;
}
while(!C3);
}
if(C4==0&&smg_mode==1)
{
Delay5ms();
if(C4==0&&smg_mode==1)
{
error_time=0;
set_v=set_v-50;
if(set_v<0)
{
set_v=500;
}
write_EEPROM(add,set_v/10);
}
while(!C4);
}
if(C4==0&&smg_mode!=1)
{
Delay5ms();
if(C4==0&&smg_mode!=1)
{
error_time++;
}
while(!C4);
}
R4=0;R1=R2=R3=1;
C1=C2=C3=C4=1;
if(C3==0)
{
Delay5ms();
if(C3==0)
{
error_time=0;
smg_mode++;
if(smg_mode>=3)
{
smg_mode=0;
}
}
while(!C3);
}
if(C4==0&&smg_mode==1)
{
Delay5ms();
if(C4==0&&smg_mode==1)
{
error_time=0;
set_v=set_v+50;
if(set_v>500)
{
set_v=0;
}
write_EEPROM(add,set_v/10);
}
while(!C4);
}
if(C4==0&&smg_mode!=1)
{
Delay5ms();
if(C4==0&&smg_mode!=1)
{
error_time++;
}
while(!C4);
}
}
//===================================
//===================================smg
void Delay400us() //@11.0592MHz
{
unsigned char i, j;
i = 5;
j = 74;
do
{
while (--j);
} while (--i);
}
void SMG(int wei,int dat)
{
choose_573(6);
P0=0x80>>(wei-1);
choose_573(7);
P0=xianshi[dat];
choose_573(0);
P0=0xff;
}
void smg_display()
{
if(smg_mode==0)
{
SMG(1,v_temp%10);
Delay400us();
SMG(2,(v_temp%100)/10);
Delay400us();
SMG(3,(v_temp%1000)/100);
Delay400us();
SMG(3,11);
Delay400us();
SMG(4,10);
Delay400us();
SMG(5,10);
Delay400us();
SMG(6,10);
Delay400us();
SMG(7,10);
Delay400us();
SMG(8,12);
Delay400us();
}
if(smg_mode==1)
{
SMG(1,set_v%10);
Delay400us();
SMG(2,(set_v%100)/10);
Delay400us();
SMG(3,(set_v%1000)/100);
Delay400us();
SMG(3,11);
Delay400us();
SMG(4,10);
Delay400us();
SMG(5,10);
Delay400us();
SMG(6,10);
Delay400us();
SMG(7,10);
Delay400us();
SMG(8,13);
Delay400us();
}
if(smg_mode==2)
{
SMG(1,count_v%10);
Delay400us();
if(count_v>=10)
{
SMG(2,(count_v%100)/10);
}
else
{
SMG(2,10);
}
Delay400us();
if(count_v>=100)
{
SMG(3,(count_v%1000)/100);
}
else
{
SMG(3,10);
}
Delay400us();
SMG(4,10);
Delay400us();
SMG(5,10);
Delay400us();
SMG(6,10);
Delay400us();
SMG(7,10);
Delay400us();
SMG(8,14);
Delay400us();
}
}
//===================================
//===================================计数
int i;
void jishu()
{
if(v_number>set_v)
{
for(i=0;i<3;i++)
{
Delay5ms();
}
if(v_number<set_v)
{
count_v++;
}
}
if(count_v%2!=0)
{
led_work=(led_work&0xfd)|0x00;
choose_573(4);
P0=led_work;
choose_573(0);
}
else
{
led_work=(led_work&0xfd)|0x02;
choose_573(4);
P0=led_work;
choose_573(0);
}
}
void error_keyboard()
{
if(error_time>=3)
{
led_work=(led_work&0xfb)|0x00;
}
else
{
led_work=(led_work&0xfb)|0x04;
}
}
//===================================
void main()
{
init_system();
Timer0Init();
set_v=read_EEPROM(add);
set_v=set_v*10;
while(1)
{
smg_display();
key_board();
jishu();
error_keyboard();
}
}
iic.c
/*
程序说明: IIC总线驱动程序
软件环境: Keil uVision 4.10
硬件环境: CT107单片机综合实训平台 8051,12MHz
日 期: 2011-8-9
*/
#include "reg52.h"
#include "intrins.h"
#define DELAY_TIME 5
#define SlaveAddrW 0xA0
#define SlaveAddrR 0xA1
//总线引脚定义
sbit SDA = P2^1; /* 数据线 */
sbit SCL = P2^0; /* 时钟线 */
void IIC_Delay(unsigned char i)
{
do{_nop_();}
while(i--);
}
//总线启动条件
void IIC_Start(void)
{
SDA = 1;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 0;
}
//总线停止条件
void IIC_Stop(void)
{
SDA = 0;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 1;
IIC_Delay(DELAY_TIME);
}
//发送应答
void IIC_SendAck(bit ackbit)
{
SCL = 0;
SDA = ackbit; // 0:应答,1:非应答
IIC_Delay(DELAY_TIME);
SCL = 1;
IIC_Delay(DELAY_TIME);
SCL = 0;
SDA = 1;
IIC_Delay(DELAY_TIME);
}
//等待应答
bit IIC_WaitAck(void)
{
bit ackbit;
SCL = 1;
IIC_Delay(DELAY_TIME);
ackbit = SDA;
SCL = 0;
IIC_Delay(DELAY_TIME);
return ackbit;
}
//通过I2C总线发送数据
void IIC_SendByte(unsigned char byt)
{
unsigned char i;
for(i=0; i<8; i++)
{
SCL = 0;
IIC_Delay(DELAY_TIME);
if(byt & 0x80) SDA = 1;
else SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 1;
byt <<= 1;
IIC_Delay(DELAY_TIME);
}
SCL = 0;
}
//从I2C总线上接收数据
unsigned char IIC_RecByte(void)
{
unsigned char i, da;
for(i=0; i<8; i++)
{
SCL = 1;
IIC_Delay(DELAY_TIME);
da <<= 1;
if(SDA) da |= 1;
SCL = 0;
IIC_Delay(DELAY_TIME);
}
return da;
}
int temp;
unsigned int read_v()
{
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(0x03);
IIC_WaitAck();
IIC_Stop();
IIC_Start();
IIC_SendByte(0x91);
IIC_WaitAck();
temp=IIC_RecByte();
IIC_SendAck(1);
IIC_Stop();
return temp;
}
int temp1;
void write_EEPROM(int add,int dat)
{
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(add);
IIC_WaitAck();
IIC_SendByte(dat);
IIC_WaitAck();
IIC_Stop();
}
int read_EEPROM(int add)
{
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(add);
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0xa1);
IIC_WaitAck();
temp1=IIC_RecByte();
IIC_SendAck(1);
IIC_Stop();
return temp1;
}
iic.h
#ifndef _IIC_H
#define _IIC_H
void IIC_Start(void);
void IIC_Stop(void);
bit IIC_WaitAck(void);
void IIC_SendAck(bit ackbit);
void IIC_SendByte(unsigned char byt);
unsigned char IIC_RecByte(void);
unsigned int read_v();
void write_EEPROM(int add,int dat);
int read_EEPROM(int add);
#endif
**
码字不容易,点个赞再走!!!!
**

















 1170
1170

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









