







给定一个包含非负整数的 m x n 网格 grid ,请找出一条从左上角到右下角的路径,使得路径上的数字总和为最小。
说明:每次只能向下或者向右移动一步。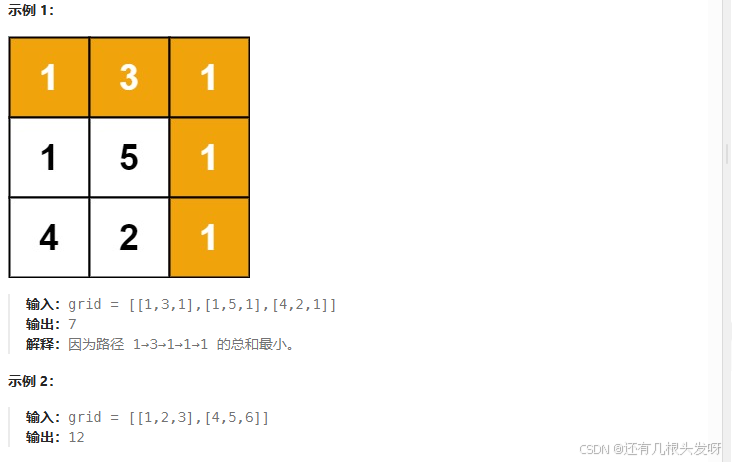
动态规划解网格最小路径和问题思路详解
一、核心算法思想
本解法采用动态规划策略,其核心思想是将复杂问题分解为重叠子问题,通过存储中间计算结果避免重复计算
该问题满足动态规划的两个关键性质:
- 最优子结构:每个位置的最小路径和仅取决于上方和左方的最优解
- 无后效性:当前状态确定后,后续决策不受之前路径的影响
class Solution { public: int minPathSum(vector<vector<int>>& grid) { int n = grid.size(), m = grid[0].size(); vector<vector<int>> dp(n, vector<int>(m, 0)); dp[0][0] = grid[0][0]; for (int i = 1; i < n; i++) { dp[i][0] = dp[i - 1][0] + grid[i][0]; } for (int i = 1; i < m; i++) { dp[0][i] = dp[0][i - 1] + grid[0][i]; } if(n==1) return dp[0][m-1]; if(m==1) return dp[n-1][0]; for (int i = 1; i < n;i++){ for(int j=1;j<m;j++){ dp[i][j]=min(dp[i-1][j],dp[i][j-1])+grid[i][j]; } } return dp[n-1][m-1]; } };
二、状态定义与初始化
1. 状态定义
dp[i][j] 表示从起点 (0,0) 到网格位置 (i,j) 的最小路径和。这个定义抓住了问题的本质——将全局最优问题转化为局部最优的累积计算
2. 边界初始化
// 初始化起点
dp[0][0] = grid[0][0];
// 初始化首列(只能向下走)
for(int i=1; i<n; i++)
dp[i][0] = dp[i-1][0] + grid[i][0];
// 初始化首行(只能向右走)
for(int i=1; i<m; i++)
dp[0][i] = dp[0][i-1] + grid[0][i];边界处理体现了动态规划的基础子问题解:
- 首列每个位置只能从上方的位置到达
- 首行每个位置只能从左方的位置到达
三、状态转移方程
对于非边界的网格位置 (i,j),推导出关键的状态转移方程:
dp[i][j] = min(dp[i-1][j], dp[i][j-1]) + grid[i][j];这一方程蕴含两个重要逻辑:
- 最优选择:当前位置的最小路径和来自上方或左方较小值的路径
- 代价累积:当前网格的数值必须计入总路径和
四、填表顺序与空间分析
1. 填表顺序
采用行优先遍历策略:
for(int i=1; i<n; i++)
for(int j=1; j<m; j++)这种顺序保证了计算每个 dp[i][j] 时,其依赖的 dp[i-1][j](上方)和 dp[i][j-1](左方)都已被计算
2. 空间复杂度
- 二维数组存储:O(mn) 空间
- 可优化为滚动数组:仅需 O(n) 空间(进阶优化方向)
五、正确性验证
示例测试
以典型测试用例验证:
输入:[[1,3,1],[1,5,1],[4,2,1]]
DP表填充过程:
1 4 5
2 7 6
6 8 7
最终返回 dp[2][2] = 7 ✔️六、算法特性分析
| 特性 | 说明 |
|---|---|
| 时间复杂度 | O(mn) 必须遍历整个网格 |
| 空间复杂度 | O(mn) 存储DP表 |
| 适用场景 | 中等规模网格(200x200以内) |
| 边界处理 | 正确处理单行/单列的特殊情况 |
| 扩展性 | 可扩展处理障碍物、多方向移动等变种问题 8 |
七、常见问题解答
为什么不用DFS/BFS?
- DFS会产生指数级时间复杂度 O(2^(m+n))
- BFS空间复杂度较高且无法利用最优性剪枝
如何理解动态规划的优势?
通过存储子问题解,将时间复杂度从指数级降为多项式级,典型空间换时间策略
八、优化建议
- 滚动数组优化:只需保留前一行数据,空间复杂度降为 O(n)
- 原地修改:直接利用原数组存储DP值(需允许修改输入)
- 并行计算:对于大规模网格可采用分块并行计算
附:完整代码逻辑流程图
开始
│
├─ 初始化DP表首行首列 → 单方向累加
│
├─ 双重循环填充DP表 → 取上方/左方较小值
│
└─ 返回右下角DP值 → 全局最优解该解法以清晰的逻辑流程展现了动态规划解决路径问题的典型模式,可作为同类问题的解题范式


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









