






 博客介绍了常见排序算法,包括直接插入排序、希尔排序、选择排序、堆排序、冒泡排序和快速排序。阐述了各算法的排序思想、时间复杂度、空间复杂度和稳定性等特性,还对快速排序的Hoare法、挖坑法和前后指针法进行了详细分析。
博客介绍了常见排序算法,包括直接插入排序、希尔排序、选择排序、堆排序、冒泡排序和快速排序。阐述了各算法的排序思想、时间复杂度、空间复杂度和稳定性等特性,还对快速排序的Hoare法、挖坑法和前后指针法进行了详细分析。
常见的排序算法:
按照插入排序分:1.直接插入排序 2.希尔排序
按照选择排序分:1.选择排序 2.堆排序
按照交换排序分:1.冒泡排序 2.快速排序
按照归并排序分:1.归并排序
常见的排序思想:是使用双指针或者三指针,在同一个数组上遍历、比较、交换。
1、直接插入排序
类比于扑克牌抽排,双指针思路。
1.时间复杂度:最坏情况下O(N^2),如54321,最好情况下O(N),如12345(只用i动,j不用走)
2.空间复杂度:O(1)
3.稳定性:稳定
4.使用场景:元素集合越接近有序,直接插入排序算法时间效率越高。
public void insertSort(int[] array){
//[27,15,9,18,28]
for (int i = 1; i < array.length; i++) {
int temp = array[i];
int j = i-1;
for (; j >=0 ; j--) {
if (array[j] > temp){
array[j+1] = array[j];
}else {
//如果不用调整,则表示已经找到了该放的位置了
//因为前面都有序了
break;
}
}
//当j循环走完以后,要么就是走完了所有,要么就是找到了最小位置
//所以走完以后直接把j+1的位置赋值为temp即可
array[j+1] = temp;
}
}
2、希尔排序(缩小增量排序)
基本思想:先选定一个整数,把待排序文件中所有记录分成多个组,所有距离为的记录分在同一组内,并对每一组内的记录进行排序。当到达 =1时,所有记录在统一组内排好序。
时间复杂度:O(n^1.25)~O(1.6*n^1.25)
空间复杂度:O(1)
稳定性:不稳定
希尔排序的特性总结:
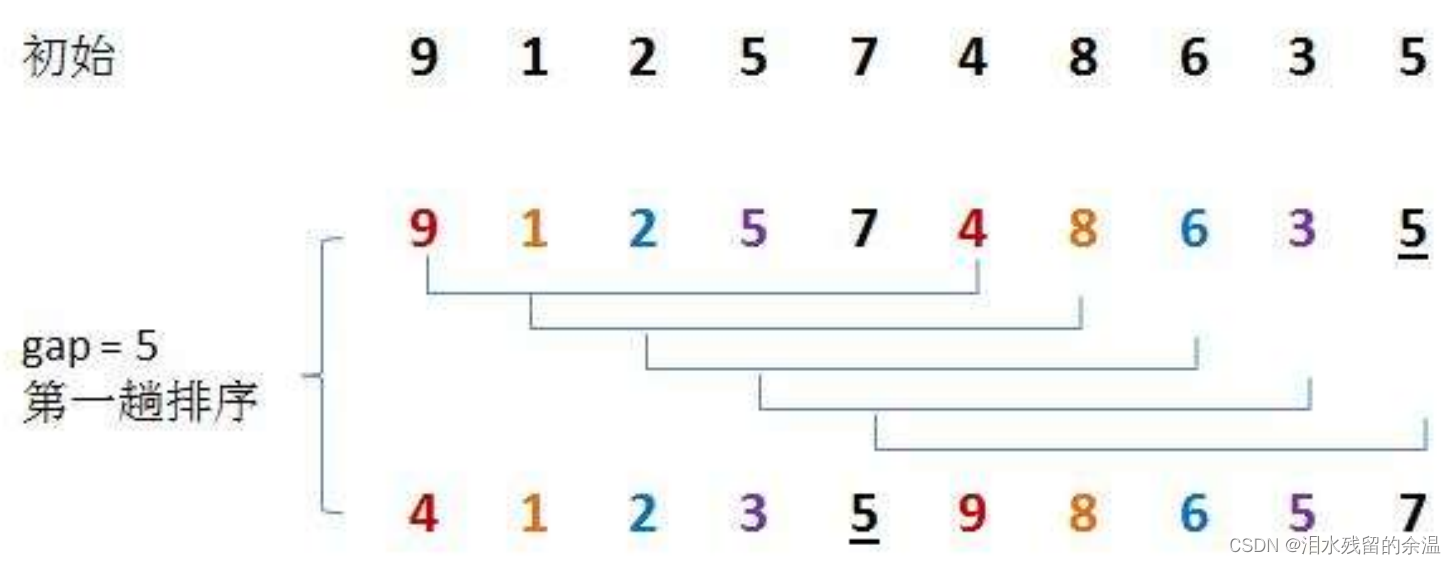
跳着分的目的是让交换之后,大的数都在后面,小的数都在前面。前面的这些趟都是预排序,最后1趟才是真正的排序。每一组都是插入排序,越有序越快。
public void shellSort(int[] array){
int gap = array.length;
//gap表示array数组,分为多少个组
while (gap > 1){
//每次缩短一半的分组
gap /= 2;
shell(array,gap);
}
}
/**
* 对每组进行插入排序
* @param array
* @param gap
*/
public void shell(int[] array,int gap) {
for (int i = gap; i < array.length ; i++) {
int tmp = array[i];
int j = i-gap;
for (; j >=0 ; j-=gap) {
if (array[j] > tmp){
array[j+gap] = array[j];
}else {
break;
}
}
array[j+gap] = tmp;
}
}
3、选择排序
时间复杂度:O(n^2)
空间复杂度:O(1)
稳定性:不稳定
public void selectSort(int[] array){
//双指针思想
for (int i = 0; i < array.length; i++) {
int miniIndex = i;
for (int j = i+1; j < array.length; j++) {
//如果j指向的数值小于最小值,那么就更新最小值索引
if (array[j] <= array[miniIndex]){
miniIndex = j;
}
}
//找到最小值索引以后,就跟i位置交换
swap(array,i,miniIndex);
}
}
//3指针思想
public void doubleSelectSort(int[] array){
int left = 0;
int right = array.length-1;
while (left < right){
int minIndex = left;
int maxIndex = left;
//走一趟left和right之间的值
for (int i = left + 1;i<= right;i++){
if (array[i] < array[minIndex]){
minIndex = i;
}
if (array[i] > array[maxIndex]){
maxIndex = i;
}
}
//注意,如果最大值在第一个位置,会出现bug
//如果最大值在下标为0的位置,此时第一个swap会把最大值换到minIndex位置上
//而第二个swap会把0位置的最小值换到数组最后一个位置,就乱了
swap(array,minIndex,left);
//如果最大值的索引,正好等于left
//交换完成以后,left存储的是最小值,minIndex存储的是最大值
//所以需要多加一步,将minIndex赋给maxIndex
if (maxIndex == left){
maxIndex = minIndex;
}
swap(array,maxIndex,right);
left++;
right--;
}
}
4、堆排序
利用堆的特性来排序。排升序是用大根堆,排降序是用小根堆。其实就是不断地将堆中的树进行向上升序或者向下排序,由于堆中的元素是大根堆或者小根堆排列的,所以最终的树就是有序的了。
时间复杂度:O(N*logN)
空间复杂度:O(1)
稳定性:不稳定
public void heapSort(int[] array){
//先把数组创建成堆
createHeap(array);
//从最后一棵树开始排序
int end = array.length-1;
while (end > 0){
swap(array,0,end);
siftDown(array,0,end);
end--;
}
}
private void siftDown(int[] array,int parent, int lenght) {
int child = 2 * parent + 1;
while (child < lenght){
if (child + 1<lenght && array[child] < array[child+1]){
child++;
}
if (array[child] > array[parent]){
swap(array,child,parent);
parent = child;
child = 2*parent+1;
}else {
break;
}
}
}
private void createHeap(int[] array) {
//从最后一个父亲结点开始创建
for (int parent = (array.length-1-1)/2; parent >=0 ; parent--) {
siftDown(array,parent,array.length);
}
}
5、冒泡排序
双指针
时间复杂度:O(n^2),优化以后最好情况下可以达到O(n)
空间复杂度:O(1)
稳定性:稳定
public void bubbleSort(int[] array){
for (int i = 0; i < array.length-1; i++) {
boolean flg = false;
for (int j = 0; j < array.length-1-i; j++) {
if (array[i] > array[j]){
swap(array,i,j);
flg = true;
}
}
if (!flg){
break;
}
}
}6、快速排序
时间复杂度:最好的情况下,O(N*logN),当最坏的情况下,O(N^2),逆序或者有序
空间复杂度:O(logN)
稳定性:不稳定
上述为快速排序递归实现的主框架,发现与二叉树前序遍历规则非常像,同学们在写递归框架时可想想二叉树前序遍历规则即可快速写出来,后序只需分析如何按照基准值来对区间中数据进行划分的方式即可。
其实最核心的任务就是找到相交点,交换。
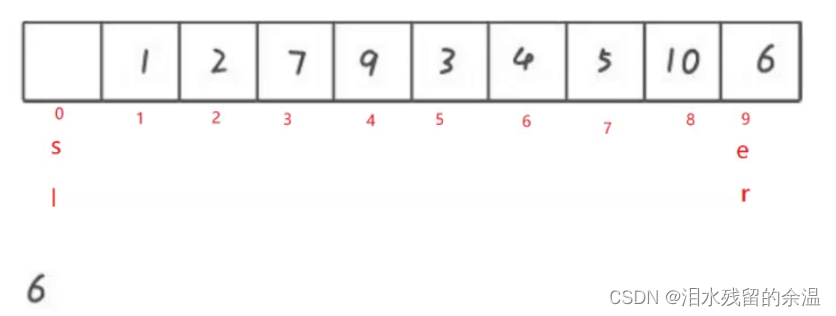
6.1 Hoare法
递归以后层数多了可能会栈溢出。因为怕就怕他切分的这棵树,左边长右边短,或者左边短右边长。如果是均匀切分的话,其实是效果比较好的。
private void quick(int[] array,int start,int end){
if (start >= end){
return;
}
//每次相遇的位置
int pivot = partitionHoare(array,start,end);
//以相遇的位置作为分割点,切分以后递归继续找
quick(array,start,pivot-1);
quick(array,pivot+1,end);
}
private int partitionHoare(int[] array, int left, int right) {
//待比较元素
int tmp = array[left];
int i =left;
while (left < right){
//单独的循环,不能一直减到超过左边的边界
while (left < right && array[right] >= tmp){
right--;
}
while (left < right && array[left] <= tmp){
left ++;
}
//交换left和right找到的值
swap(array,left,right);
}
//此时left和right都在相遇点了,将相遇点换到最前面
swap(array,i,left);
return left;
}
6.2 挖坑法(Hoare衍生出来的)
挖坑法就是把基准从数组中拿出来,数组中就留下了一个坑,然后同样从右边和左边遍历,遇到大于或者小于基准的就把那个元素,拿到坑这个位置放下,反复循环,知道左右索引相遇,就把基准填入最后一个坑里。
private int partitionHole(int[] array,int left,int right){
//待比较元素
int tmp = array[left];
while (left < right){
//单独的循环,不能一直减到超过左边的边界
while (left < right && array[right] >= tmp){
right--;
}
//right找到比基准小的值,就把right所指向的元素填入left位置
//因为此时left位置就是坑
array[left] = array[right];
while (left < right && array[left] <= tmp){
left ++;
}
array[right] = array[left];
}
array[left] = tmp;
return left;
}值得注意的2个细节:
1,array[right] >= tmp 为什么要加等于?
如果不加等于,会死循环。因为left=right,left无法++right无法--,会不停地交换这两个值。
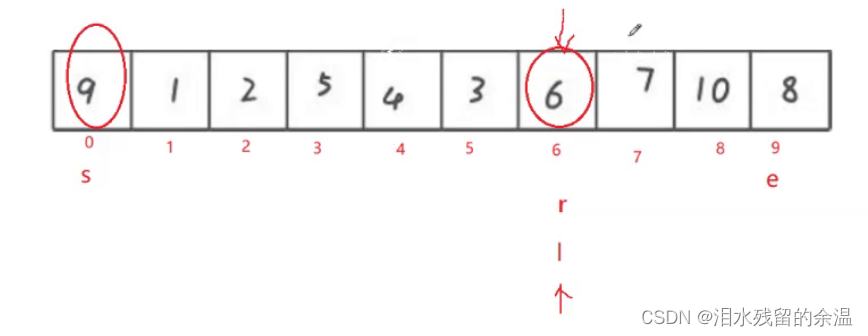
2,为什么从右边开始而不是先从左边开始?
如果先让left先走,那么走到相遇地方的时候,left指向的是一个比较大的数,此时将left和最左边交换,会让这个大的数换到最左边去。而如果是从右边先开始的话,right不断--,当遇到left的时候,right走到的是一个较小的数,此时再与最左边交换,就没问题。
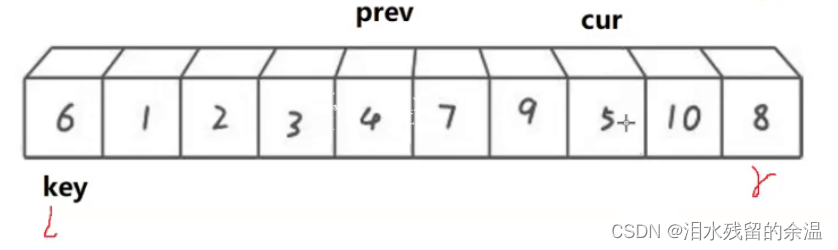
6.3 前后指针法
cur用来指向比基准小的数,prev用来推着比基准大的数,cur不停地找比基准小的数,去和prev指向的比基准大的数交换。给人的感觉就是prev在不停地推着这些比基准大的数往前滚动,cur作为开路先锋去找小的数来交换。
//前后指针法1
private int partitionBFPoint1(int[] array, int left, int right) {
int prev = left ;
int cur = left+1;
while (cur <= right) {
if(array[cur] < array[left] && array[++prev] != array[cur]) {
swap(array,cur,prev);
}
cur++;
}
swap(array,prev,left);
return prev;
}//前后指针法2
private int partitionBFPoint2(int[] array, int left, int right) {
int d = left + 1;
int pivot = array[left];
for (int i = left + 1; i <= right; i++) {
if (array[i] < pivot) {
swap(array, i, d);
d++;
}
}
swap(array, d - 1, left);
return d - 1;
}6.4 快速排序小结
三种快速排序的方法:
1.Hoare法
2.挖坑法
3.前后指针法
这三种方法每次划分以后的序列顺序,有可能是不一样的。
当面临一个序列,要你判断他用的哪一种快速排序的方法的时候。根据以往的经验,先后检验的顺序是挖坑法、Hoare法、前后指针法。

















 811
811

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









