







 本文介绍了标号变迁系统(LTS),它是一种特殊迁移系统,主要关注系统行为。文中给出了LTS的定义、终止状态、Trace、Parallel Composition和可达状态的定义及例子,还介绍了集合运算符号逆集和补集,展示了如何用LTS建模并行系统。
本文介绍了标号变迁系统(LTS),它是一种特殊迁移系统,主要关注系统行为。文中给出了LTS的定义、终止状态、Trace、Parallel Composition和可达状态的定义及例子,还介绍了集合运算符号逆集和补集,展示了如何用LTS建模并行系统。
标号变迁系统(Labelled Transition System)
在计算机科学中,迁移系统(Transition System)常被用来建模一个系统。非正式的来讲,迁移系统可看成是一个有向图。它的结点表示状态,有向边表示状态的变化。常见的迁移系统包括两种:
- 一种关注结点即状态,用状态来描述系统在某一时刻的性质,标记的是结点上的属性。
- 另一种迁移系统关注的是有向边,也即迁移行为,标注的是动作事件。
第二种迁移系统,称为标号变迁系统(Labelled Transition System),简称为 LTS,是一种特殊迁移系统,它主要关注的是系统的行为(或称为事件)。LTS 的名字来源于,它的迁移(transition)都由一个动作事件(action/event)来标记,它关注的是这些**标记(label)而非具体的状态(state)**本身。LTS 中所有行为的集合称为它的词汇表。
因此,LTS 常用在基于行为的形式化建模中。注意:基于状态的迁移系统和基于事件的迁移系统是可互相表示的(等价的)。
1. 标号迁移系统 LTS 的定义
我们使用 States 表示所有可能的状态的集合,Act 表示所有的行为标签的集合。一个 LTS 是一个四元组
E
=
(
S
E
,
A
E
,
Δ
E
,
s
0
,
E
)
E=(S_E,A_E,\Delta_E,s_{0,E})
E=(SE,AE,ΔE,s0,E),其中:
- S E ⊆ S t a t e s S_E \subseteq States SE⊆States 是一个有穷的状态集合,表示 E E E 的状态空间,
- A E ⊆ A c t A_E \subseteq Act AE⊆Act 是一个有穷的词汇表,表示 E E E 的行为空间,
- Δ E ⊆ ( S E × A E × S E ) \Delta_E \subseteq (S_E \times A_E \times S_E) ΔE⊆(SE×AE×SE) 表示 E E E 的迁移关系,
- s 0 , E ∈ S E s_{0,E} \in S_E s0,E∈SE 表示 E E E 的起始状态。
通常为了更加直观地反映迁移动作,对于 LTS E E E 的两个状态 s s s 和 t t t ,我们用符号 s → a t s\xrightarrow{a} t sat 来表示 ( s , a , t ) ∈ Δ E (s,a,t)\in \Delta_E (s,a,t)∈ΔE 。
正如前文所说,迁移系统可以看成一个有向图,所当迁移系统规模较小的时候,我们可以用有向图来更直观地展示一个迁移系统。
有的时候,为了使迁移边的指向方向一致,会规定除了指示起始结点的边以外的所有的边的指向方向,比如与顺时针方向一致。
1.1 例子
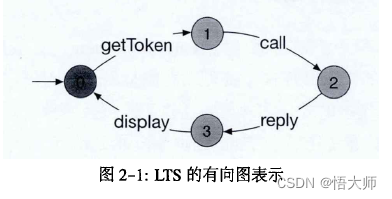
图2-1 表示了一个简单系统的 LTS 模型。其中用一个没有源结点的箭头来指向起始状态。这个系统首先请求一个授权令牌(getToken 动作),然后使用这个授权令牌来调用某些外部服务(call 动作)。在得到回复(reply 动作)之后,将结果显不给用户(display 动作)。
对应的形式化表示为 E = ( S E , A E , Δ E , S 0 , E ) E=(S_E,A_E,\Delta _E,S_{0,E}) E=(SE,AE,ΔE,S0,E) ,其中:
- S E = { 0 , 1 , 2 , 3 } S_E=\{0,1,2,3\} SE={0,1,2,3},
- A E = { g e t T o k e n , c a l l , r e p l y , d i s p l a y } A_E=\{getToken,call,reply,display\} AE={getToken,call,reply,display},
- Δ E = { ⟨ 0 , g e t T o k e n , 1 ⟩ , ⟨ 1 , c a l l , 2 ⟩ , ⟨ 2 , r e p l y , 3 ⟩ , ⟨ 3 , d i s p l a y , 0 ⟩ } \Delta _E=\{\langle 0,getToken,1 \rangle,\langle 1,call,2 \rangle,\langle 2,reply,3 \rangle,\langle 3,display,0 \rangle \} ΔE={⟨0,getToken,1⟩,⟨1,call,2⟩,⟨2,reply,3⟩,⟨3,display,0⟩} ,
- S 0 , E = 0 S_{0,E}=0 S0,E=0 。
2. LTS 的终止状态
LTS 的终止状态(terminal state)直观上就是那些不能迁移到其他状态的状态。在有向图的表示中,就是没有指向其他结点的出边的那些结点。形式化的定义如下:
2.1 定义
LTS E E E 中的一个状态 s s s 称为 E E E 的终止状态,当且仅当有 { t ∣ ∃ a ∈ A E ⋅ ( s , a , t ) ∈ Δ E } = ∅ \{t|\exists a\in A_E \cdot (s,a,t)\in \Delta_E\}=\empty {t∣∃a∈AE⋅(s,a,t)∈ΔE}=∅ 。
2.2 例子
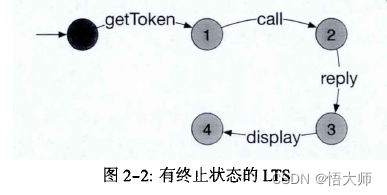
例如 图2-2 所示,状态 4 为终止状态,这个 LTS 的行为相当于 图2-1 中的一次性执行然后就终止。
3. Trace
3.1 定义
给定一个 LTS
E
=
(
S
E
,
A
E
,
Δ
E
,
S
0
,
E
)
E=(S_E,A_E,\Delta_E,S_{0,E})
E=(SE,AE,ΔE,S0,E) 和一个动作序列
π
=
l
0
,
l
1
,
.
.
.
\pi=l_0,l_1,...
π=l0,l1,...。如果存在一个状态和动作交替的序列
s
0
,
l
0
,
s
1
,
l
1
,
.
.
.
s_0,l_0,s_1,l_1,...
s0,l0,s1,l1,... ,并且满足
∀
i
∈
N
⋅
(
s
i
,
l
i
,
s
i
+
1
)
∈
Δ
E
\forall i \in N \cdot (s_i,l_i,s_{i+1})\in \Delta_E
∀i∈N⋅(si,li,si+1)∈ΔE,那么我们称
π
\pi
π 是
E
E
E 的一个 trace。
3.2 例子
在 图 2-1 中,
g
e
t
T
o
k
e
n
,
c
a
l
l
,
r
e
p
l
y
,
d
i
s
p
l
a
y
,
.
.
.
getToken,call,reply,display,...
getToken,call,reply,display,... 为 图2-1 中的 trace 。
4. Parallel Composition ∣ ∣ || ∣∣
在现实生活中,很多硬件或者软件系统都是并行的,所接下来我们看一下,如果利用 LTS 来建模并行系统。
4.1 定义
给定两个 LTS M = ( S M , A M , Δ M , s 0 , M ) M=(S_M,A_M,\Delta_M,s_{0,M}) M=(SM,AM,ΔM,s0,M) 和 E = ( S E , A E , Δ E , s 0 , E ) E=(S_E,A_E,\Delta_E,s_{0,E}) E=(SE,AE,ΔE,s0,E) ,parallel composition ∣ ∣ || ∣∣ 是一个对称的结合操作,满足 E ∣ ∣ M E||M E∣∣M 是一个 LTS E ∣ ∣ M = ( S E × E M , A E ∪ A M , Δ , ( s 0 , E , s 0 , M ) ) E||M=(S_E \times E_{M},A_E \cup A_M, \Delta,(s_{0,E},s_{0,M})) E∣∣M=(SE×EM,AE∪AM,Δ,(s0,E,s0,M)) ,其中 Δ \Delta Δ 是满足下面规定的最小关系集合。对于 l ∈ A E ∪ A M l \in A_E \cup A_M l∈AE∪AM,
- 如果 l ∈ A E \ A M l \in A_E \verb|\|A_M l∈AE\AM 并且 ( s , l , s ′ ) ∈ Δ E (s,l,s')\in \Delta_E (s,l,s′)∈ΔE,那么 ( ( s , t ) , l , ( s ′ , t ) ) ∈ Δ ((s,t),l,(s',t))\in \Delta ((s,t),l,(s′,t))∈Δ ,
- 如果 l ∈ A M \ A E l\in A_M \verb|\|A_E l∈AM\AE 并且 ( t , l , t ′ ) ∈ Δ M (t,l,t')\in \Delta_M (t,l,t′)∈ΔM ,那么 ( ( s , t ) , l , ( s , t ′ ) ) ∈ Δ ((s,t),l,(s,t'))\in \Delta ((s,t),l,(s,t′))∈Δ ,
- 如果 l ∈ A M ∩ A E l\in A_M \cap A_E l∈AM∩AE 并且 ( s , l , s ′ ) ∈ Δ E (s,l,s')\in \Delta_E (s,l,s′)∈ΔE 并且 ( t , l , t ′ ) ∈ Δ M (t,l,t')\in \Delta_M (t,l,t′)∈ΔM,那么 ( ( s , t ) , l , ( s ′ , t ′ ) ) ∈ Δ ((s,t),l,(s',t'))\in \Delta ((s,t),l,(s′,t′))∈Δ ,
4.1.1 补充集合运算符号 逆集 \ \verb|\| \ 和 补集 / \verb|/| /
补集 / \verb|/| /:
- 两个集中非共同元素组成的集合(也叫反交集)
- 例 : { 1 , 2 , 3 } / { 1 , 3 , 4 } = { 2 , 4 } \{1,2,3\} \verb|/| \{1,3,4\}=\{2,4\} {1,2,3}/{1,3,4}={2,4}
逆集 \ \verb|\| \:
- 第二个集合减去第一个集合所包含的元素,称为逆集(也叫反差集)
- 例 : { 1 , 2 , 3 } \ { 1 , 3 , 4 } = { 4 } \{1,2,3\} \verb|\| \{1,3,4\}=\{4\} {1,2,3}\{1,3,4}={4}
4.2 例子
考虑一个并行的系统,它有两部分组成,客户端 LTS
C
l
i
Cli
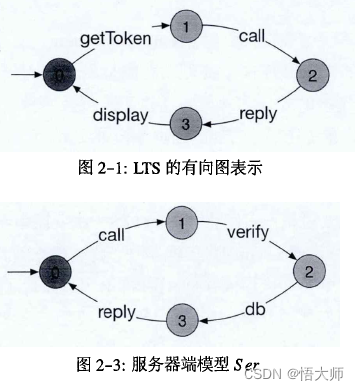
Cli( 图 2-1)和服务器端(图 2-3)。服务器程序在收到客户端的服务请求调用(call)后,验证客户端使用的授权令牌(verify),然后在数据库中进行一些查询操作(db),最后将数据返回给客户端(reply)。这里我们为了简便,假设所有动作若发生,则代表了动作成功。对于 verify 来说,如果验证错误我们就认为该动作执行失败,程序无法进行下一步的动作。事实上,我们可以添加其他状态来代表程序的错误状态,但是这对于我们理解这些背景知识关系不大,为了简洁,所我们做了上述假设。
其中 C l i Cli Cli 对应的形式化表示为 E = ( S E , A E , Δ E , S 0 , E ) E=(S_E,A_E,\Delta _E,S_{0,E}) E=(SE,AE,ΔE,S0,E) ,其中:
- S E = { 0 , 1 , 2 , 3 } S_E=\{0,1,2,3\} SE={0,1,2,3},
- A E = { g e t T o k e n , c a l l , r e p l y , d i s p l a y } A_E=\{getToken,call,reply,display\} AE={getToken,call,reply,display},
- Δ E = { ⟨ 0 , g e t T o k e n , 1 ⟩ , ⟨ 1 , c a l l , 2 ⟩ , ⟨ 2 , r e p l y , 3 ⟩ , ⟨ 3 , d i s p l a y , 0 ⟩ } \Delta _E=\{\langle 0,getToken,1 \rangle,\langle 1,call,2 \rangle,\langle 2,reply,3 \rangle,\langle 3,display,0 \rangle \} ΔE={⟨0,getToken,1⟩,⟨1,call,2⟩,⟨2,reply,3⟩,⟨3,display,0⟩} ,
- S 0 , E = 0 S_{0,E}=0 S0,E=0 。
其中 S e r Ser Ser 对应的形式化表示为 M = ( S M , A M , Δ M , S 0 , M ) M=(S_M,A_M,\Delta _M,S_{0,M}) M=(SM,AM,ΔM,S0,M) ,其中:
- S M = { 0 , 1 , 2 , 3 } S_M=\{0,1,2,3\} SM={0,1,2,3},
- A M = { c a l l , v e r i f y , d b , r e p l y } A_M=\{call,verify,db,reply\} AM={call,verify,db,reply},
- Δ M = { ⟨ 0 , c a l l , 1 ⟩ , ⟨ 1 , v e r i f y , 2 ⟩ , ⟨ 2 , d b , 3 ⟩ , ⟨ 3 , r e p l y , 0 ⟩ } \Delta _M=\{\langle 0,call,1 \rangle,\langle 1,verify,2 \rangle,\langle 2,db,3 \rangle,\langle 3,reply,0 \rangle \} ΔM={⟨0,call,1⟩,⟨1,verify,2⟩,⟨2,db,3⟩,⟨3,reply,0⟩} ,
- S 0 , M = 0 S_{0,M}=0 S0,M=0 。
我们把它们中相同名宇的动作看成需要同步的共享动作。如果有相同的名字但是不想成为共享动作,我们在进行 Parallel Composition 操作前可重命名该动作的名字或者隐藏该动作使得其对 Parallel Composition 不可见。因此在默认情况下,本论文将把所有 Parallel Composition 中的 LTS 之间的相同名字的动作认为需要同步执行的。客户端和服务端的 Parallel Composition 的结果
C
l
i
∣
∣
S
e
r
Cli||Ser
Cli∣∣Ser 如 图 2-4 所示。
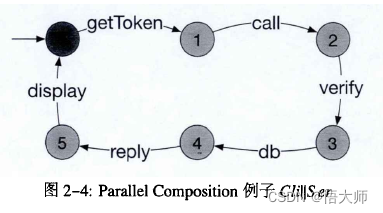
- S E ∣ ∣ M = { 0 , 1 , 2 , 3 , 4 , 5 } S_{E||M}=\{0,1,2,3,4,5\} SE∣∣M={0,1,2,3,4,5},
- A E ∣ ∣ M = { g e t T o k e n , c a l l , v e r i f y , d b , r e p l y , d i s p l a y } A_{E||M}=\{getToken,call,verify,db,reply,display\} AE∣∣M={getToken,call,verify,db,reply,display},
- Δ E ∣ ∣ M = { ⟨ 0 , g e t T o k e n , 1 ⟩ , ⟨ 1 , c a l l , 2 ⟩ , ⟨ 2 , v e r i f y , 3 ⟩ , ⟨ 3 , d b , 4 ⟩ , ⟨ 4 , r e p l y , 5 ⟩ , ⟨ 5 , d i s p l a y , 0 ⟩ } \Delta _{E||M}=\{\langle 0,getToken,1 \rangle,\langle 1,call,2 \rangle,\langle 2,verify,3 \rangle,\langle 3,db,4 \rangle ,\langle 4,reply,5 \rangle ,\langle 5,display,0 \rangle \} ΔE∣∣M={⟨0,getToken,1⟩,⟨1,call,2⟩,⟨2,verify,3⟩,⟨3,db,4⟩,⟨4,reply,5⟩,⟨5,display,0⟩} ,
- S 0 , E ∣ ∣ M = 0 S_{0,E||M}=0 S0,E∣∣M=0 。
5. 可达状态
一个系统中可能会有一些永远不会执行的功能,例如代码中的永远都为假的条件分支。那么在建模得到的 LTS 中,就可能会有一些不可达状态,即从该 LTS 的起始状态没有一个 trace 前缀可达到该状态。形式化的定义如下。
5.1 定义
给定一个 LTS E = ( S E , A E , Δ , s 0 , E ) E=(S_E,A_E,\Delta,s_{0,E}) E=(SE,AE,Δ,s0,E) 和一个状态 s ∈ S E s\in S_E s∈SE 。如果存在一个状态和动作角度的序列 s 0 , l 0 , s 1 , l 1 , . . . , s n s_0,l_0,s_1,l_1,...,s_n s0,l0,s1,l1,...,sn ,其中 n ≥ 0 n\geq 0 n≥0 并且满足 ∀ i ∈ N ⋅ 0 ≤ j < n → ( s i , l i , s i + 1 ) ∈ Δ E \forall i \in N \cdot 0 \leq j < n \rightarrow (s_i,l_i,s_{i+1})\in \Delta _E ∀i∈N⋅0≤j<n→(si,li,si+1)∈ΔE ,并且有 s 0 = s 0 , E s_0=s_{0,E} s0=s0,E 和 s n = s s_n=s sn=s,那么我们称 s s s 是(从起始状态)可达的。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









