







1. 平台
系统版本: Ubuntu16.04.6
ROS版本: ROS Kinetic Kame
官方网址 : https://wiki.ros.org/ROS/Installation
2. 准备
2.1 检查 Ubuntu 软件源
在 Ubuntu 的 System Settings -> SoftWare & Updates -> Ubuntu SoftWare 中勾选 universe, restricted, multiverse 三项,如下图所示:
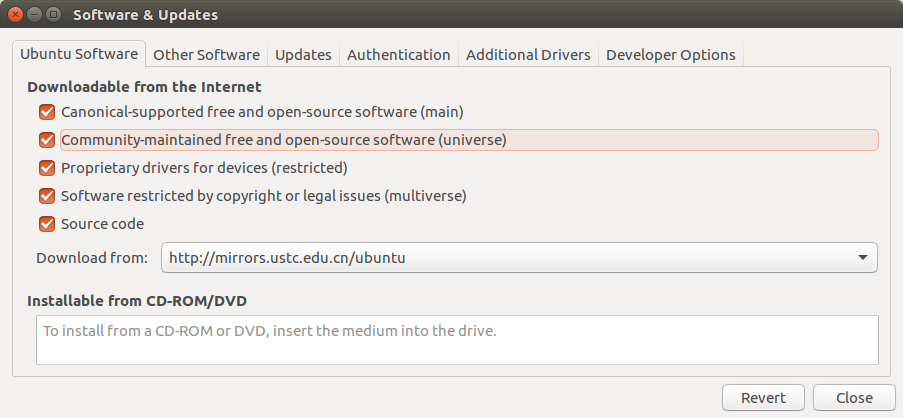
为了加快下载速度,可以在 Download from 选项中填入国内的镜像地址,其中我选择的是中科大的下载地址。
2.2 添加 sources.list & key
添加软件源
$ sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
其中 sudo sh -c ' comand ' 指令执行引号里面的指令,comand 可以是多个 bash 指令的组合。
添加公钥
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
更新
$ sudo apt-get update && sudo apt-get upgrade
3. 安装ROS
完整版
$ sudo apt-get install ros-kinetic-desktop-full
桌面版
sudo apt-get install ros-kinetic-desktop
基础版
sudo apt-get install ros-kinetic-ros-base
独立功能包
sudo apt-get install ros-kinetic-PACKAGE
查找软件包
apt-cache search ros-kinetic
4. 配置ROS
4.1 初始化 rosdep
$ sudo rosdep init && rosdep update
4.2 设置环境变量
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
$ source ~/.basnrc
采用 source 命令可以执行脚本文件
4.3 安装rosinstall
$ sudo apt-get install python-rosinstall
5. 测试ROS
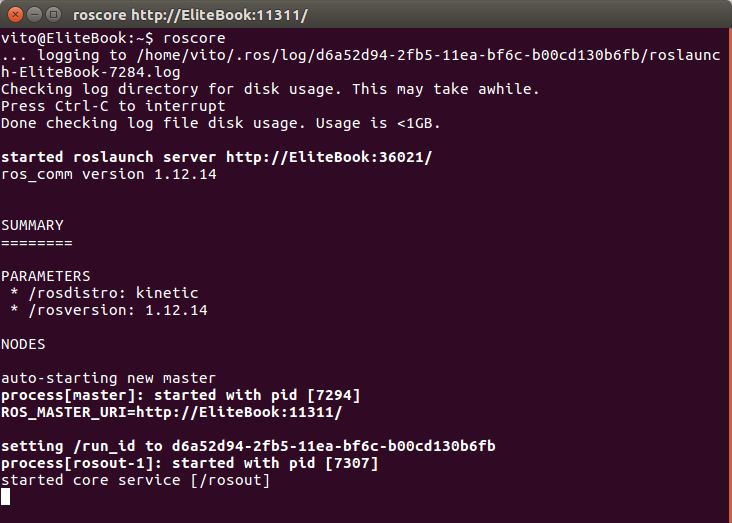
$ roscore
启动 ROS 的节点管理器 — ROS Master,如下图所示:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









