









图的定义
- 由非空顶点集V和边集E组成,记为
G
=
(
V
,
E
)
G=(V,E)
G=(V,E),
E
(
G
)
E(G)
E(G)表示图G中顶点间的关系几何,
E
=
{
(
u
,
v
)
∣
u
∈
V
,
v
∈
V
}
E=\left \{ (u,v) | u \in V, v \in V \right \}
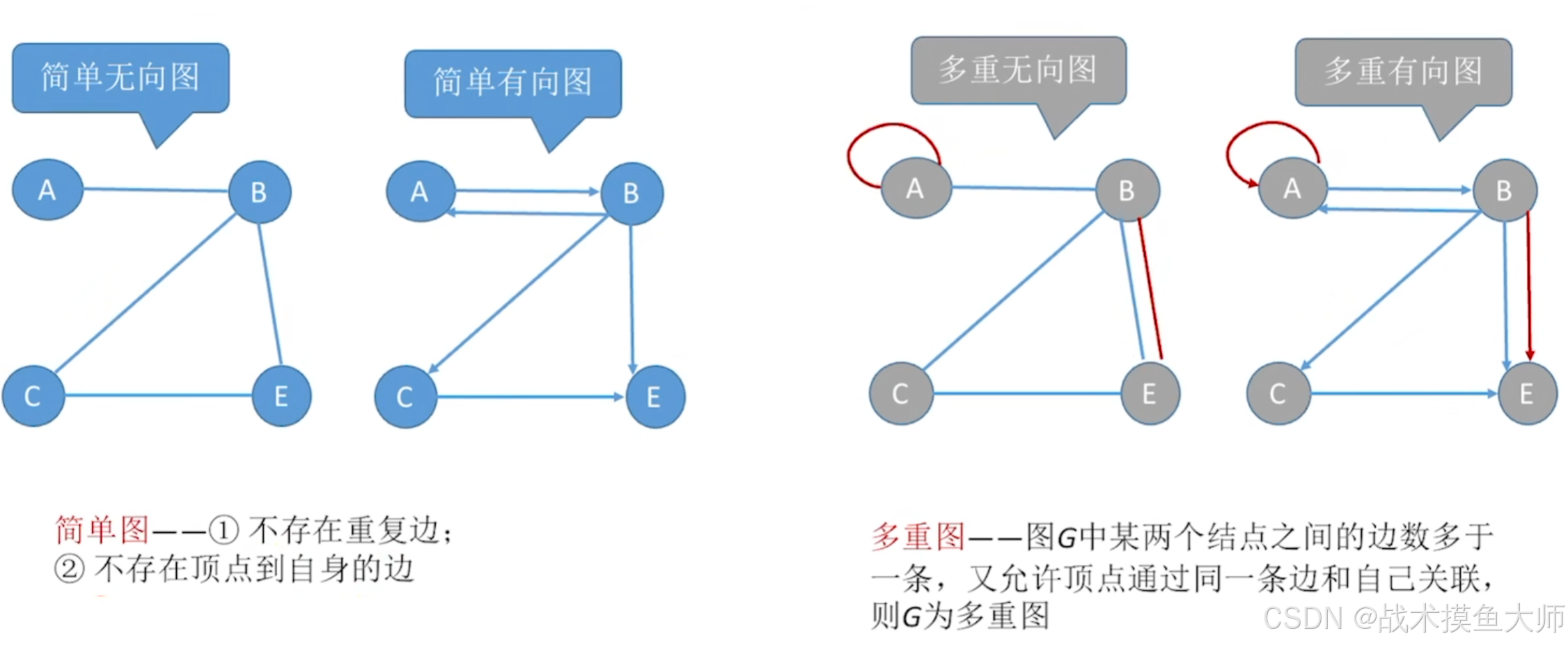
E={(u,v)∣u∈V,v∈V}。根据边是否有方向分为无向图和有向图。根据是否有重复边可以分为简单图和多重图。
- 相关定义:
- 依附于顶点的边的个数,被称为顶点的度;
- 定点间如果有可达路径,被称为连通,如果两个顶点互相都可达,称为强连通。对于无向图,如果任意顶点间都是连通的,称为连通图。对于有向图,如果任意间都是强连通的称为强连通图
- 对于边较多的称为稠密图,边较少的称为稀疏图,二者没有明确边界
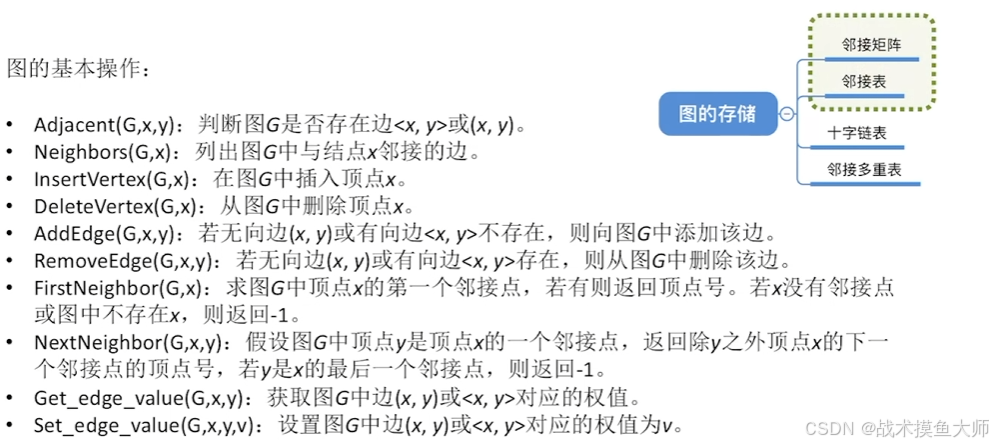
图的存储方法
-
邻接矩阵法:存储一个 n × n n \times n n×n的矩阵,点 ( i , j ) (i,j) (i,j)代表顶点i与顶点j之间有无边,无向图的邻接矩阵是对称矩阵。如果是有权图,矩阵中可以存储边的权值。这种方法复杂度为 O ( n 2 ) O(n^2) O(n2)比较适合存储稠密图,
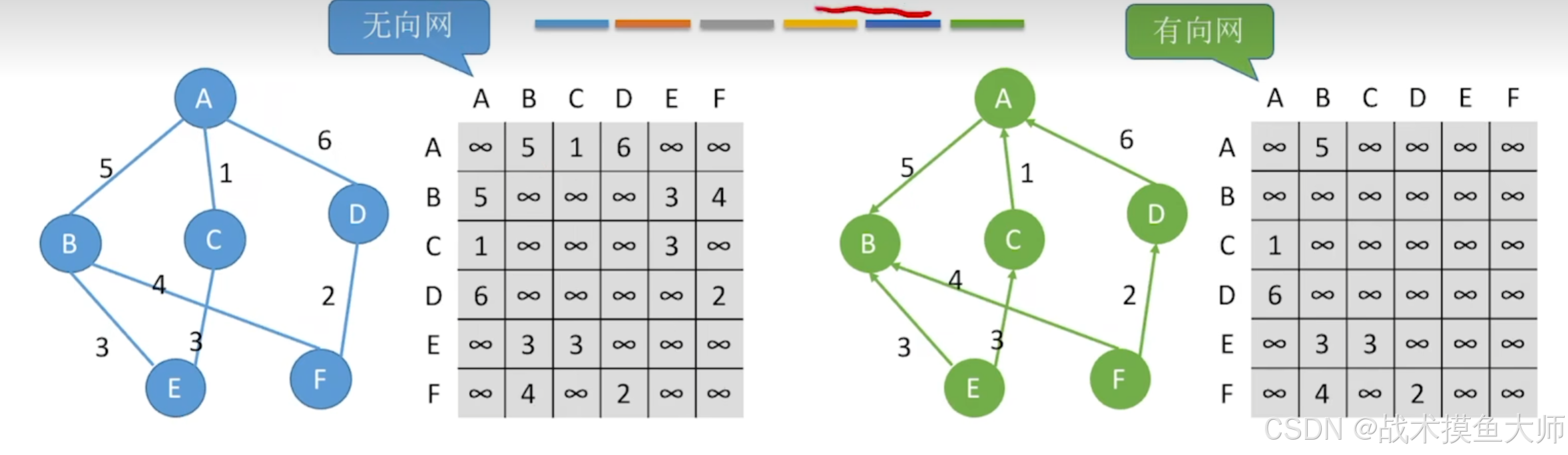
- 如果用0来表示无边,1表示有边,邻接矩阵A的n次方中的点(i,j)表示从i到j长度为n的路径数量。
-
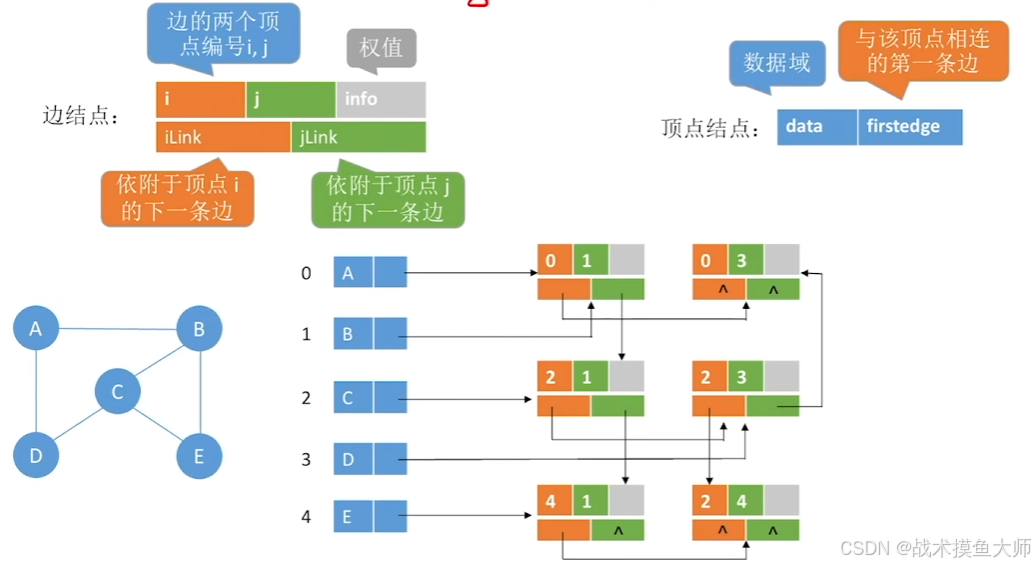
邻接表:定义顶点类和边类,顶点类存储顶点信息维护一个指针指向边类,边类存储边的信息维护一个指针指向下一条边。与树的孩子表示法类似。
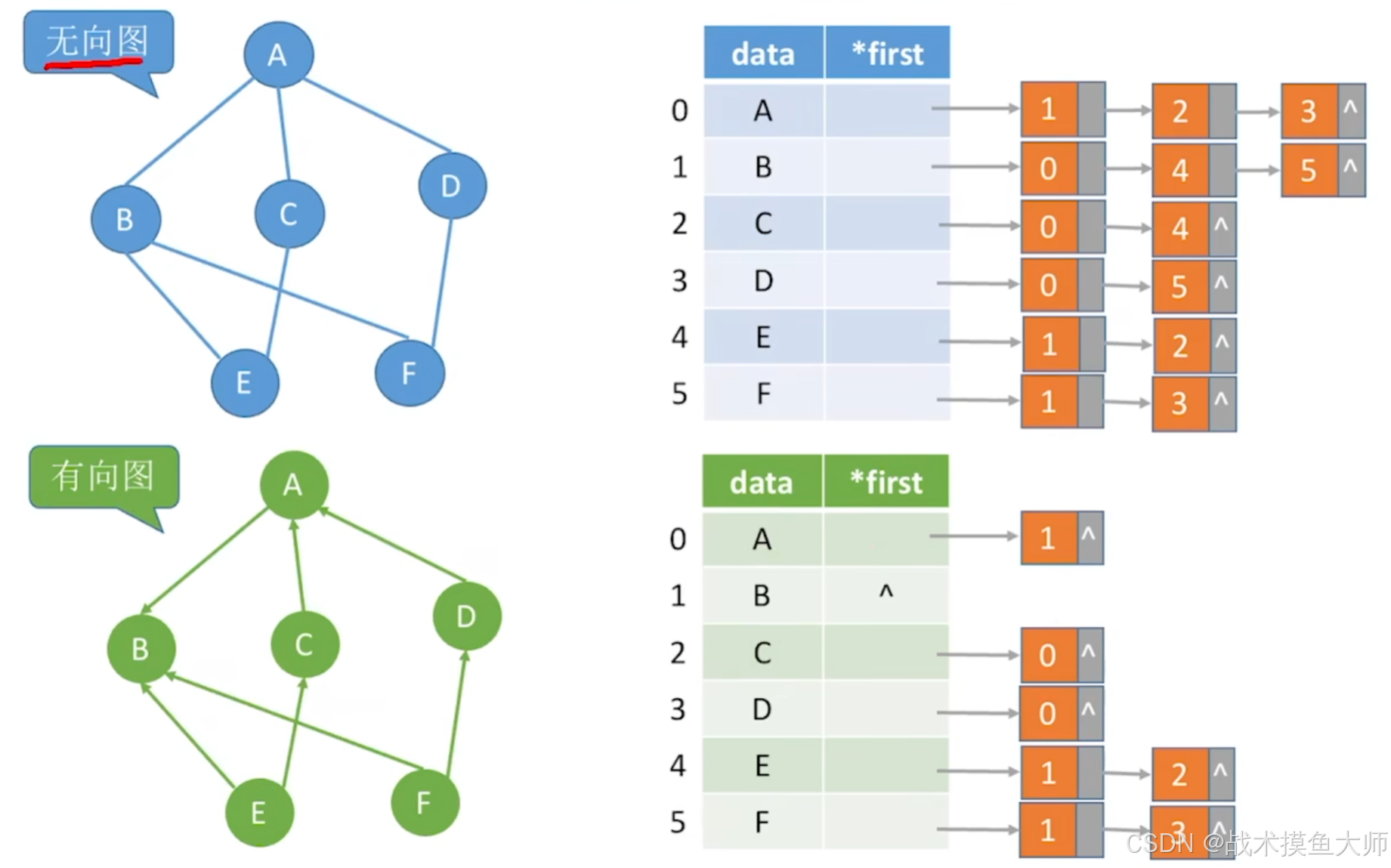
- 复杂度 O ( V + E ) O(V+E) O(V+E),适合存储稀疏图,找指向某个顶点的所有边不太方便。
-
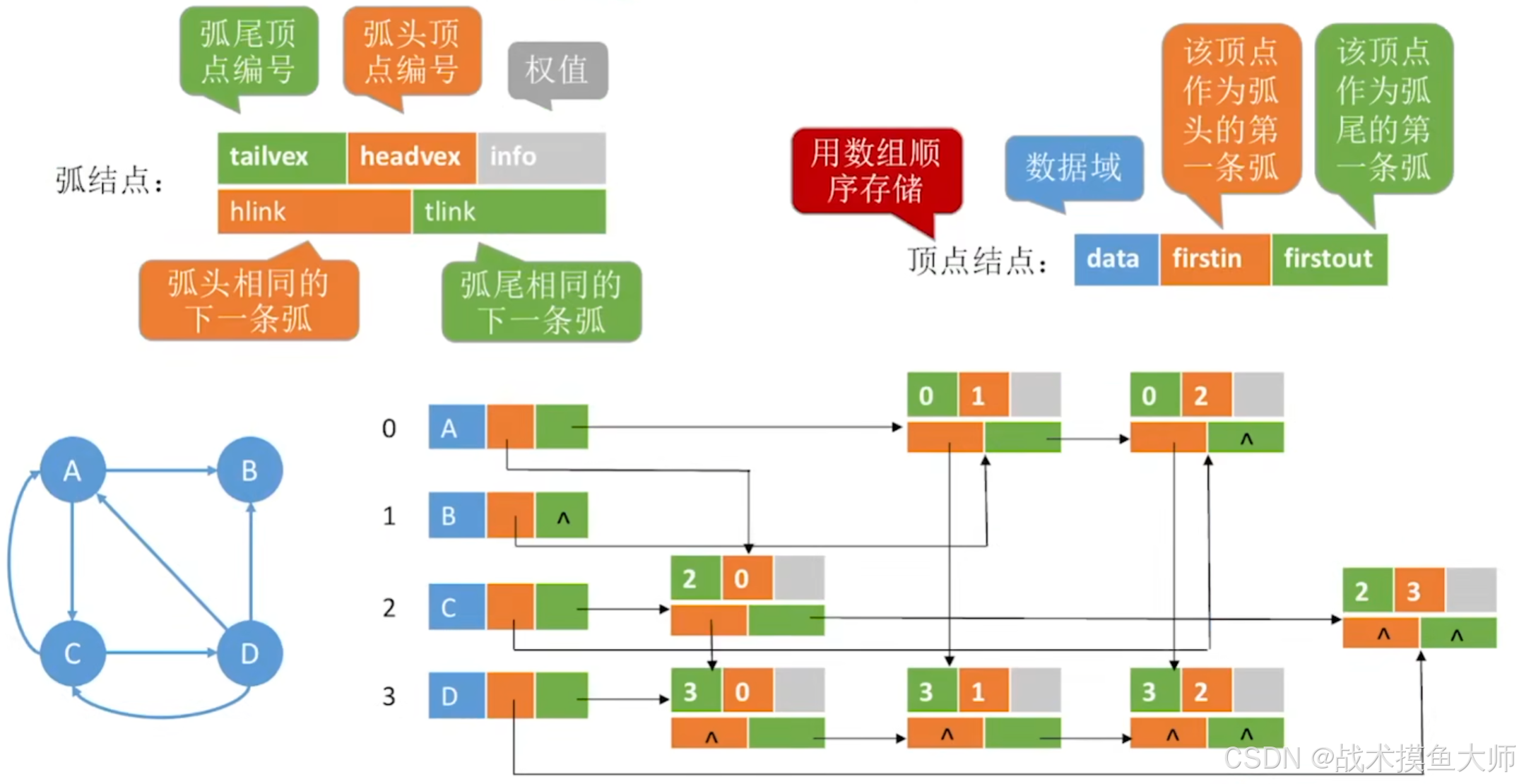
十字链表(只能用于存储有向图):跟上面的邻接表类似,在尾节点相同的边之间也维持了一个链表
-
邻接多重表(无向图):跟十字链表类似
图的相关操作
图的应用
- 深度学习:神经网络在训练时需要进行反向传播更新梯度,可以使用图的形式存储神经网络,每个中间数据就是图的一个节点,每个操作就是一条边,这样设计便于进行i求导和梯度更新。在推理时,可以将图中可以合并的多个边和节点合并成一个,提高计算效率,这一步骤称为模型推理的图优化阶段。例如 z = s i g m o d ( y ) , y = w x + b z=sigmod(y),y=wx+b z=sigmod(y),y=wx+b,可以合并成 z = s i g m o d ( w x + b ) z=sigmod(wx+b) z=sigmod(wx+b)。
- 自动驾驶:路径规划时,可以将路径空间建模为一个图,在图中查找满足约束的最优路径,将路径规划问题建模为查找图中最短路径的问题。
C++代码实现
邻接矩阵存储
#include <iostream>
#include <vector>
#include <unordered_map>
using namespace std;
constexpr int kNoEdge = 0;
enum class GraphType{
kDigraph,
kUndigraph,
};
/// @brief 邻接矩阵法实现,临界矩阵中0表示无边,其他表示权重
template<typename T>
class Graph{
public:
Graph(vector<T> vertexs, vector<vector<int>> edges, GraphType graphtype) : vertexs_(vertexs), edges_(edges), graphtype_(graphtype) {
for(int i=0;i<vertexs_.size();i++){
vertex_indexs_[vertexs_[i]] = i;
}
}
bool Adjacent(T x,T y) const;
private:
GraphType graphtype_;
vector<T> vertexs_;
unordered_map<T, int> vertex_indexs_;
vector<vector<int>> edges_;
};
template<typename T>
bool Graph<T>::Adjacent(T x, T y) const
{
auto iter = vertex_indexs_.find(x);
if(iter == vertex_indexs_.end()){
cout << "Error Vertex" << endl;
return false;
}
int index1 = iter->second;
iter = vertex_indexs_.find(y);
if(iter == vertex_indexs_.end()){
cout << "Error Vertex" << endl;
return false;
}
int index2 = iter->second;
return edges_[index1][index2];
}
int main()
{
vector<string> vertexs = {"home","school","KTV"};
vector<vector<int>> edges = {{0,1,1},{1,0,0},{1,0,0}};
Graph<string> test_map(vertexs,edges,MapType::kUndigraph);
cout << test_map.Adjacent("school","KTV") << endl;
cout << test_map.Adjacent("school","home") << endl;
return 0;
}
邻接表实现
#include <iostream>
#include <vector>
#include <unordered_map>
#include <string>
#include <memory>
using namespace std;
enum class MapType{
kDigraph,
kUndigraph
};
class Edge{
public:
Edge(int start_vertex_id,int end_vertex_id) :
value_(1.0),
next_edge_(nullptr),
start_vertex_id_(start_vertex_id),
end_vertex_id_(end_vertex_id) {}
~Edge() {
if(next_edge_ != nullptr){
delete next_edge_;
}
};
// private:
double value_;
int start_vertex_id_;
int end_vertex_id_;
Edge* next_edge_;
};
// 定义图中顶点的数据结构
template<typename T>
class Vertex {
public:
Vertex(T data) : data_(data) {}
Vertex(T data, int id) : data_(data), vertex_id_(id) {}
bool AddEdge(int end_vertex_id){
if(edges_ == nullptr){
edges_ = make_shared<Edge>(vertex_id_,end_vertex_id);
}else{
Edge* temp = edges_.get();
while(temp->next_edge_ != nullptr){
if(temp->end_vertex_id_ == end_vertex_id) { return false;}
temp = temp->next_edge_;
}
if(temp->end_vertex_id_ == end_vertex_id) { return false;}
temp->next_edge_ = new Edge(vertex_id_,end_vertex_id);
}
return true;
}
bool Adjacent(int end_vertex_id){
Edge* temp = edges_.get();
while(temp != nullptr){
if(temp->end_vertex_id_ == end_vertex_id) { return true;}
temp = temp->next_edge_;
}
return false;
}
// private:
T data_;
int vertex_id_;
shared_ptr<Edge> edges_;
};
template<typename T>
class Graph {
public:
Graph() : type_(MapType::kDigraph) {};
bool AddVertex(Vertex<T> input){
if(vertex_index_.find(input.data_) != vertex_index_.end()){return false;}
vertex_index_[input.data_] = vertexs_.size();
input.vertex_id_ = vertexs_.size();
vertexs_.emplace_back(input);
return true;
}
bool AddEdge(T start, T end){
auto iter = vertex_index_.find(start);
if(iter == vertex_index_.end()){return false;}
int start_id = iter->second;
iter = vertex_index_.find(end);
if(iter == vertex_index_.end()){return false;}
return vertexs_[start_id].AddEdge(iter->second);
}
bool Adjacent(T start, T end){
auto iter = vertex_index_.find(start);
if(iter == vertex_index_.end()){return false;}
int start_id = iter->second;
iter = vertex_index_.find(end);
if(iter == vertex_index_.end()){return false;}
return vertexs_[start_id].Adjacent(iter->second);
}
// private:
MapType type_;
vector<Vertex<T>> vertexs_;
unordered_map<T,int> vertex_index_;
};
int main() {
Vertex<string> home("home");
Vertex<string> school("school");
Vertex<string> KTV("KTV");
Graph<string> graph;
graph.AddVertex(home);
graph.AddVertex(school);
graph.AddVertex(KTV);
graph.AddEdge("home","school");
graph.AddEdge("home","KTV");
cout << graph.Adjacent("home","school") << endl;
return 0;
}
Ref
王道考研408-数据结构


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









