






在本篇博文中,主要是推荐了一些博主觉得非常好的相关博文
1、内积、外积
1.1 内积(点乘)
- 公式

- 物理意义:
- 表征或计算两个向量之间的夹角
- b向量在a向量方向上的投影
1.2 外积(叉乘)
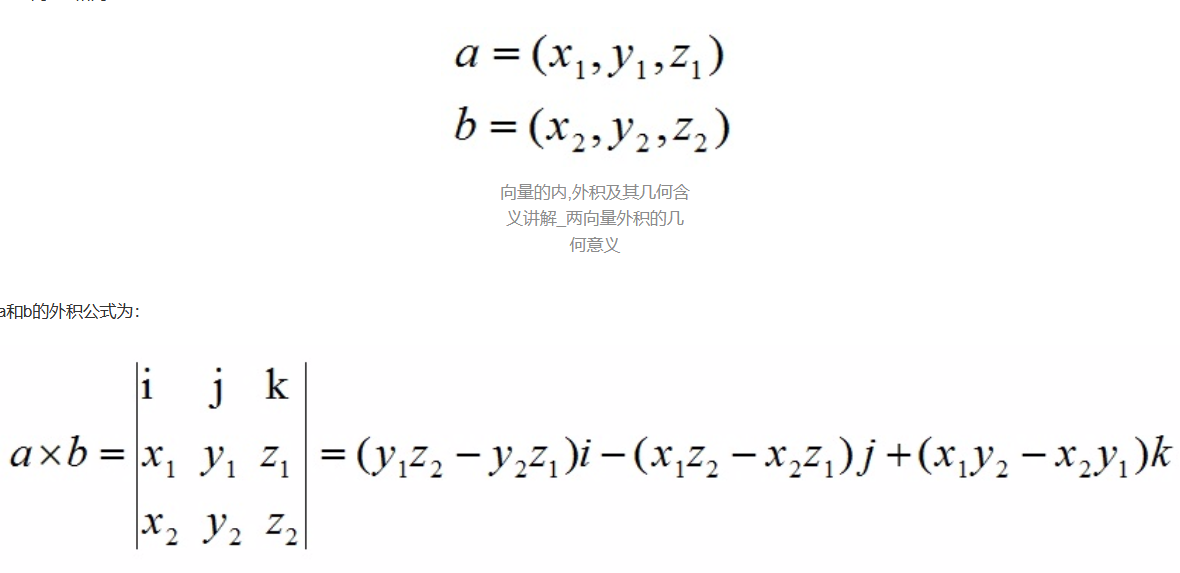 在三维几何中,向量a和向量b的外积结果是一个向量,有个更通俗易懂的叫法是法向量,该向量垂直于a和b向量构成的平面(符合右手定理)。
在三维几何中,向量a和向量b的外积结果是一个向量,有个更通俗易懂的叫法是法向量,该向量垂直于a和b向量构成的平面(符合右手定理)。
在3D图像学中,外积的概念非常有用,可以通过两个向量的外积,生成第三个垂直于a,b的法向量,从而构建X、Y、Z坐标系
在二维空间中,外积还有另外一个几何意义就是:|a×b|在数值上等于由向量a和向量b构成的平行四边形的面积
2 坐标系
2.1 齐次坐标
齐次坐标就是在现有坐标的基础上那个增加一维
 关于齐次坐标这篇博文写的非常好
关于齐次坐标这篇博文写的非常好
2.2 常用坐标系
自动驾驶中常用坐标系包括
- 像素坐标系
- 图像坐标系
- 相机坐标系
- 雷达坐标系
- 车身坐标系
- 世界坐标系
这篇博文详细解释了各个坐标系以及坐标系之间的转换
3 雷达
雷达这里,我看的很基础,从波开始看的,这篇博文关于波的部分写的很清楚
3.1 激光雷达
找了很多资料,为了留存记录,自己写了一篇博文,这里附上这篇博文


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









