







目录
1.概述
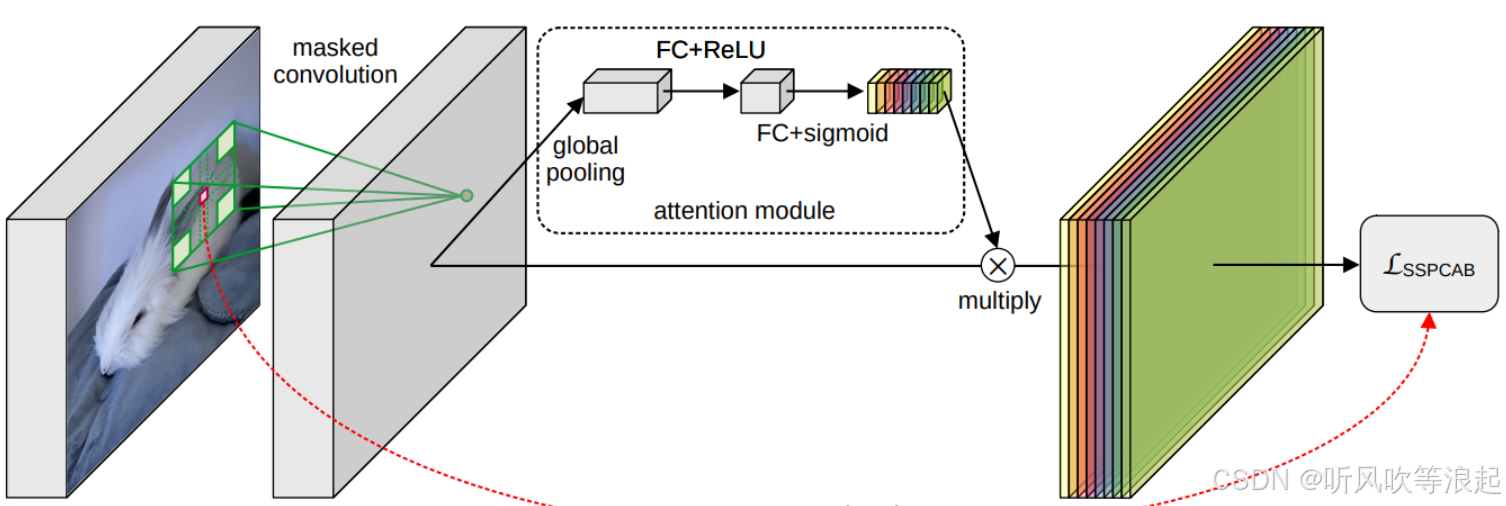
SSPCAB(Spatial Pyramid Pooling with Channel Attention Block)是2024年提出的一种新型神经网络架构改进方法,专注于在保持高精度的同时显著降低计算复杂度和参数量。
该方法通过创新的空间金字塔池化与通道注意力机制的结合,实现了网络结构的紧凑化和运算效率的大幅提升。
核心创新点
1. 混合空间金字塔池化(Hybrid Spatial Pyramid Pooling, HSPP)
传统SPP的改进版本:
-
多尺度动态核池化:根据输入特征图尺寸动态调整池化核大小和步长
-
交叉级联结构:不同尺度的池化结果不是简单拼接,而是通过交叉连接增强信息流动
-
轻量化设计:采用1×1卷积代替全连接层进行特征融合

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 5943
5943

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











