







官网地址
https://drive.google.com/drive/folders/128yBriW1IG_3NJ5Rp7APSTZsJqdJdfc1
文件夹内容
nerf_synthetic README.txt
This directory contains a dataset of synthetically rendered images that were used in "NeRF: Representing Scenes as
Neural Radiance Fields for View Synthesis".
Stats:
+ 8 Scenes
+ 100 Training images
+ 100 Validation images
+ 200 Test images
+ Images are 800x800
Structure:
SCENE_NAME
-train
r_*.png
-val
r_*.png
-test
r_*.png
r_*_depth_0000.png
r_*_normal_0000.png
transforms_train.json
transforms_val.json
transforms_test.json
Transform json details:
camera_angle_x: The FOV in x dimension
frames: List of dictionaries that contain the camera transform matrices for each image.
Attribution:
The renders are from modified blender models located on blendswap.com
chair by 1DInc (CC-0): https://www.blendswap.com/blend/8261
drums by bryanajones (CC-BY): https://www.blendswap.com/blend/13383
ficus by Herberhold (CC-0): https://www.blendswap.com/blend/23125
hotdog by erickfree (CC-0): https://www.blendswap.com/blend/23962
lego by Heinzelnisse (CC-BY-NC): https://www.blendswap.com/blend/11490
materials by elbrujodelatribu (CC-0): https://www.blendswap.com/blend/10120
mic by up3d.de (CC-0): https://www.blendswap.com/blend/23295
ship by gregzaal (CC-BY-SA): https://www.blendswap.com/blend/8167
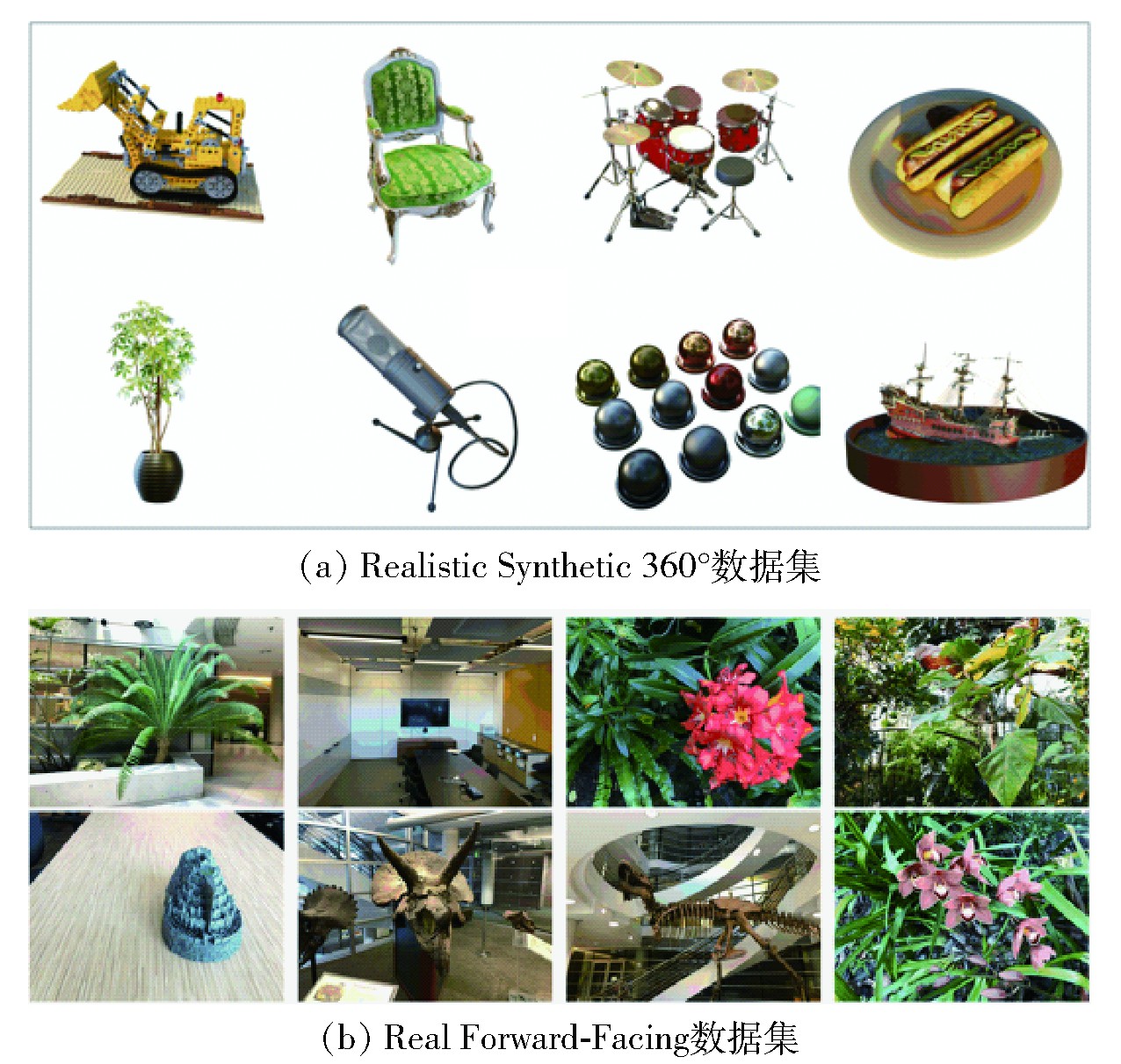
Realistic Synthetic 360°
如图 2( a) 所示,Realistic Synthetic 360°是为评 估 NeRF 方法有效性提供的合成 数据集,包 括 Chair,Drums,Ficus,Hotdog,Lego,Materials,Mic 和 Ship 等 8 个由 Blender 软件精细建模的复杂非朗伯 场景. 每个场景的图片由 Blender 的环形路径追踪 插件采集,其中的 6 个场景是从上半球方向环绕拍 摄的,另外 2 个场景是从整个球形的其他方向采集. 选取每个场景的 100 张图片用神经网络算法进行训 练,其中的 13 张图片用于测试. 该数据集所有图片 的分辨率为 800 × 800.
Real Forward-Facing
如图 2 所示,Real Forward-Facing 数据集包括 Room[6],Fern[4],Leaves[6],Fortress[4],Orchids[4], Flower[4],Trex[4] 和 Horns[6] 等 8 个真实世界的场 景. 与 Realistic Synthetic 360°数据集不同,该数据集 的图片是使用智能手机面对着场景上下左右平移拍 摄的,即采用 Forward-Facing 视角拍摄. 由于是手持 拍摄的真实场景,每张图片对应的摄像机参数由 colmap[12 - 13]估 计 得 到. 每个场景的图片数量为 20 ~ 62 不等,其中 1 /8 的图片可作为测试集,其他 图片作为训练集. 该数据集所有图片的分辨率为 1 008 ×756.


















 1081
1081

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









