






一 加权滤波
加权移动平均滤波算法是一种数字滤波技术,常用于处理传感器数据等存在噪声干扰的信号序列,在C语言中实现该算法主要涉及以下几个关键部分:
算法原理
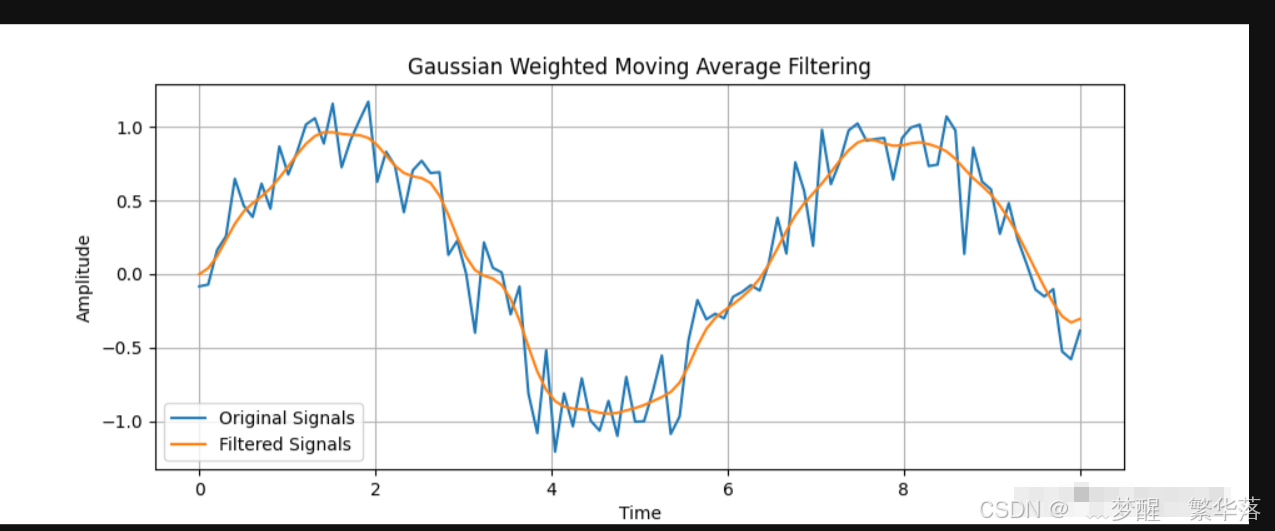
- 基本思想:移动平均滤波通过计算一定数量的连续数据点的平均值,来平滑原始信号,减少随机噪声的影响。加权移动平均滤波则更进一步,它为不同位置的数据点分配不同的权重,通常越靠近当前时刻的数据点权重越高,因为它们更能反映当下信号的真实状态。这样,加权平均的结果既能平滑噪声,又能更快跟上信号的变化趋势。
代码实现
#include <stdio.h>
// 假设我们有一组模拟传感器获取的数据
float data[] = {1.2, 1.5, 1.3, 1.7, 1.4, 1.6, 1.8, 1.5, 1.4, 1.6};
// 加权系数数组,这里简单示例5个点,中间权重最高向两边递减
float weights[] = {0.1, 0.2, 0.4, 0.2, 0.1};
// 加权移动平均滤波函数
float weighted_moving_average(int start_index) {
float sum = 0;
for (int i = 0; i < sizeof(weights) / sizeof(weights[0]); i++) {
sum += data[start_index + i] * weights[i];
}
return sum;
}
在这段代码里:
- 首先定义了一个模拟的传感器数据数组
data,以及对应的加权系数数组weights。 weighted_moving_average函数用于计算从指定索引位置开始的加权移动平均值。函数内通过循环,将对应位置的数据点乘以权重后累加起来,最终返回滤波后的数值。
使用示例
int main() {
for (int i = 0; i <= sizeof(data) - sizeof(weights); i++) {
float result = weighted_moving_average(i);
printf("索引 %d 处的加权移动平均值: %.2f\n", i, result);
}
return 0;
}
在 main 函数中:
- 利用循环遍历数据数组中所有能够凑齐加权系数数量的数据段,调用
weighted_moving_average函数计算加权移动平均值。 - 输出每个位置的滤波结果,格式化保留两位小数,方便查看和分析。
实际应用与优化
- 实际应用:在嵌入式系统里,若连接了温度传感器、加速度计等设备,采集的数据往往夹杂噪声,加权移动平均滤波就能派上用场,让后续的数据分析、控制决策更精准。
- 优化方向:权重的选择十分关键,不同的传感器特性、噪声类型,适合的权重分布不同,需要根据实际测试来精细调校。另外,代码还可以进一步优化,比如将数组替换为动态分配内存的方式,便于处理变长的数据序列;或是用指针操作来提升运算效率。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









