







SORT系列
SORT-1 项目配置运行-WINDOWS
SORT-2 卡尔曼滤波推导和示例
SORT-3 匈牙利算法和SORT类
SORT-4 SORT项目代码解析
本项目地址
SORT项目逐层详解
main
if __name__ == '__main__'
# 设置交互模式、参数、文件路径
|
# 创建 SORT 对象
mot_tracker = Sort(max_age=, min_hits=,iou_threshold)
|
# "循环"读取每一个文件(每一帧)
for frame in range(...):
# 参数准备
frame += 1 # 帧数+1
dets[] = .. # 存放 检测框
total_frames += 1
|
# 获取检测框
dets[] = ...
|
# 用检测框 dets 做一次更新; 返回满足条件可显示的trackers([x1,y1,x2,y2,ID])
trackers = mot_tracker.update(dets)
|
# 作画
for d in trakcers:
fig.canvas.flush_events()...
1.SORT 类
class Sort(object):
def __init__(self, max_age=1, min_hits=3, iou_threshold=0.3):
# Sets key parameters for SORT
self.max_age = max_age # tracker 的最大寿命
self.min_hits = min_hits # 最小匹配次数
self.iou_threshold = iou_threshold # 匹配阈值
self.trackers = [] # 存放跟踪器类 KalmanBoxTracker 对象
self.frame_count = 0
def update(self, dets=np.empty((0, 5))):
# 使用 检测框 做一次更新; dets:[x1,y1,x2,y2,ID]
# 0.参数准备
trks = np.zeros(len(self,trackers),5) #
to_del = [] # 待删除的 预测框
ret = [] # 可显示的 tracker
|
# 1.现有的跟踪器全部做一次更新预测,获得预测框
for t,trk in enumerate(trks):
pos = self.trackers[t].predict()[0] # 已有跟踪器上做一次预测
trk[:]=[pos[0], pos[1], pos[2], pos[3], 0] # 获得 "预测框" 的坐标
|
# 去除非法的预测框
trks = np.ma.compress_rows(np.ma.masked_invalid(trks))
|
# 删除 to_del 中待删除的 tracker
for t in reversed(to_del):
self.trackers.pop(t)
|
# 2.预测框和 检测框 做一次匹配
matched, unmatched_dets, unmatched_trks = \
associate_detections_to_trackers(dets,trks, self.iou_threshold)
|
# 3.根据匹配结果 分别更新三类 trakcer
# 3.1 更新匹配成功的跟踪器
for m in matched:
self.trackers[m[1]].update(dets[m[0], :])
# 3.2 为未匹配到的检测框创建一个新的跟踪器
for i in unmatched_dets:
trk = KalmanBoxTracker(dets[i,:])
self.trackers.append(trk)
|
# 3.3 根据跟踪器的存在时间、匹配次数等决定是否加入显示列表
1.1卡尔曼跟踪器
卡尔曼滤波器系统如下图所示。
输入:
状态量初始值 x k − 1 {x_{k-1}} xk−1和状态量协方差初始值 P k − 1 {P_{k-1}} Pk−1
卡尔曼滤波器中的参数设置: 状态转移矩阵 F F F,映射矩阵(或称测量矩阵) H H H等
迭代输入每一步的 观测值 Z k Z_k Zk
输出:
每一步的状态预测 x k x_k xk
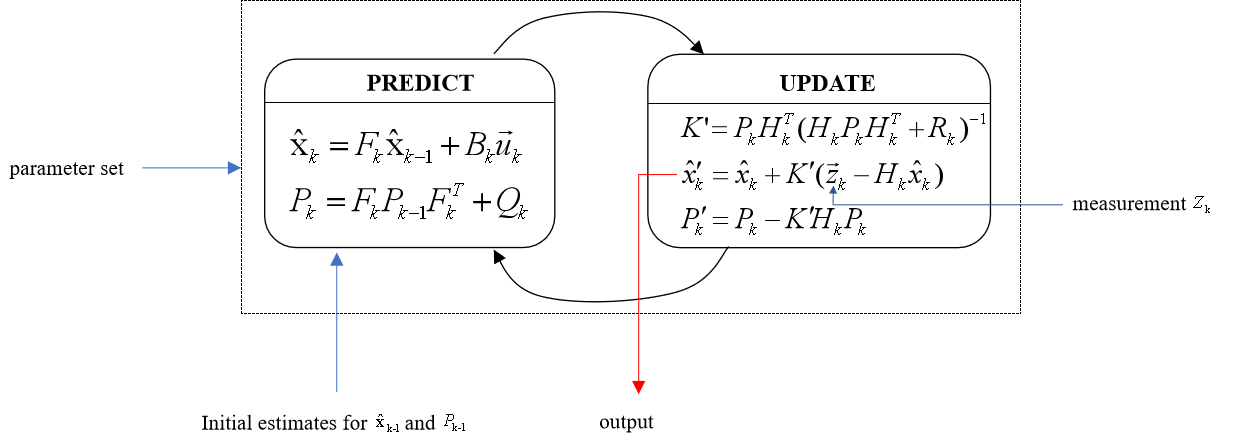
在SORT项目中,观测量 来自 YOLO 的检测结果
b
b
o
x
(
[
x
1
,
y
1
,
x
2
,
y
2
]
)
bbox([x1,y1,x2,y2])
bbox([x1,y1,x2,y2]) 的转化形式
Z
(
[
u
,
v
,
s
,
r
]
)
Z([u,v,s,r])
Z([u,v,s,r])。其中
[
u
,
v
]
[u,v]
[u,v] 是中心点的坐标,
s
s
s 是面积,
r
r
r 是面积宽高比。这样四个量将是独立的变量,减弱了 bbox 四个变量之间的相关性。
由此可以定义状态量
[
x
,
y
,
s
,
r
,
x
˙
,
y
˙
,
s
˙
]
T
[x,y,s,r,\dot x,\dot y,\dot s]^T
[x,y,s,r,x˙,y˙,s˙]T,其中
x
˙
,
y
˙
,
s
˙
\dot x,\dot y,\dot s
x˙,y˙,s˙ 分别是
x
,
y
,
s
x,y,s
x,y,s 的一阶微分
d
x
,
d
y
,
d
s
dx,dy,ds
dx,dy,ds。
在线性模型中,可将其视为 距离-速度 模型,即
x
k
=
x
k
−
1
+
d
x
d
t
x_k=x_{k-1}+dxdt
xk=xk−1+dxdt,由此可得状态转移矩阵
F
F
F:
F
=
[
1
,
0
,
0
,
0
,
1
,
0
,
0
0
,
1
,
0
,
0
,
0
,
1
,
0
0
,
0
,
1
,
0
,
0
,
0
,
1
0
,
0
,
0
,
1
,
0
,
0
,
0
0
,
0
,
0
,
0
,
1
,
0
,
0
0
,
0
,
0
,
0
,
0
,
1
,
0
0
,
0
,
0
,
0
,
0
,
0
,
1
]
F=\begin{bmatrix}1,0,0,0,1,0,0\\0,1,0,0,0,1,0\\0,0,1,0,0,0,1\\0,0,0,1,0,0,0\\0,0,0,0,1,0,0\\0,0,0,0,0,1,0\\0,0,0,0,0,0,1 \end{bmatrix}
F=⎣⎢⎢⎢⎢⎢⎢⎢⎢⎡1,0,0,0,1,0,00,1,0,0,0,1,00,0,1,0,0,0,10,0,0,1,0,0,00,0,0,0,1,0,00,0,0,0,0,1,00,0,0,0,0,0,1⎦⎥⎥⎥⎥⎥⎥⎥⎥⎤
x
k
=
F
⋅
x
k
−
1
=
[
1
,
0
,
0
,
0
,
1
,
0
,
0
0
,
1
,
0
,
0
,
0
,
1
,
0
0
,
0
,
1
,
0
,
0
,
0
,
1
0
,
0
,
0
,
1
,
0
,
0
,
0
0
,
0
,
0
,
0
,
1
,
0
,
0
0
,
0
,
0
,
0
,
0
,
1
,
0
0
,
0
,
0
,
0
,
0
,
0
,
1
]
[
x
y
s
r
x
˙
y
˙
s
˙
]
x_k=F\cdot x_{k-1}=\begin{bmatrix}1,0,0,0,1,0,0\\0,1,0,0,0,1,0\\0,0,1,0,0,0,1\\0,0,0,1,0,0,0\\0,0,0,0,1,0,0\\0,0,0,0,0,1,0\\0,0,0,0,0,0,1 \end{bmatrix}\begin{bmatrix} x\\y\\s\\r\\\dot x\\\dot y\\\dot s\end{bmatrix}
xk=F⋅xk−1=⎣⎢⎢⎢⎢⎢⎢⎢⎢⎡1,0,0,0,1,0,00,1,0,0,0,1,00,0,1,0,0,0,10,0,0,1,0,0,00,0,0,0,1,0,00,0,0,0,0,1,00,0,0,0,0,0,1⎦⎥⎥⎥⎥⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎢⎢⎢⎢⎡xysrx˙y˙s˙⎦⎥⎥⎥⎥⎥⎥⎥⎥⎤
即可得到 x k = x k − 1 + x ˙ x_k=x_{k-1}+\dot x xk=xk−1+x˙ ( y , s y,s y,s同理), x ˙ = x ˙ \dot x=\dot x x˙=x˙ ( r , y ˙ r,\dot y r,y˙同理)。这就是卡尔曼滤波器是线性滤波器原因!
class KalmanBoxTracker(object):
count = 0 # 跟踪器的存在数量,static
def __init__(self,bbox):
# 卡尔曼滤波器的主要参数设置
self.kf = KalmanFilter(dim_x=7, dim_z=4) # 定义状态空间和观测空间维度,解释见下
self.kf.F = np.array([[1,0,0,0,1,0,0],[0,1,0,0,0,1,0],[0,0,1,0,0,0,1], [0,0,0,1,0,0,0], [0,0,0,0,1,0,0],[0,0,0,0,0,1,0],[0,0,0,0,0,0,1]])
self.kf.H = np.array([[1,0,0,0,0,0,0],[0,1,0,0,0,0,0],[0,0,1,0,0,0,0], [0,0,0,1,0,0,0]])
self.kf.R[2:,2:] *= 10.
self.kf.P[4:,4:] *= 1000.
self.kf.P *= 10.
self.kf.Q[-1,-1] *= 0.01
self.kf.Q[4:,4:] *= 0.01
self.kf.x[:4] = convert_bbox_to_z(bbox) # [u,v,s,r,u',v',s']
self.time_since_update = 0
self.id = KalmanBoxTracker.count
KalmanBoxTracker.count += 1
self.history = []
self.hits = 0
self.hit_streak = 0
self.age = 0
def update(self,bbox):
# 用检测框更新 tracker(kalman filter update)
self.time_since_update = 0 # 自第一次 update(创建) 的匹配次数
self.history = [] # 保存历次的
self.hits += 1
self.hit_streak += 1 # 与检测框成功匹配的次数
self.kf.update(convert_bbox_to_z(bbox)) # 调用库函数的 update
def predict(self):
if((self.kf.x[6]+self.kf.x[2])<=0):
self.kf.x[6] *= 0.0
self.kf.predict()
self.age += 1
if(self.time_since_update>0):
self.hit_streak = 0
self.time_since_update += 1
self.history.append(convert_x_to_bbox(self.kf.x))
return self.history[-1] # 返回最后(新)一个 bbox
1.2检测框与预测框的关联
def associate_detections_to_trackers(detections,trackers,iou_threshold = 0.3):


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









