









留个笔记自用
Accurate and Robust Scale Recovery for Monocular Visual Odometry Based on Plane Geometry
做什么
Monocular Visual Odometry单目视觉里程计

相机在运动过程中连续两帧之间会存在overlap,即会同时观测到三维世界中的某些场景以及特征点。而这些场景特征点会投射到2D图片上,通过图片的对齐或者特征的匹配,可以找到前后图片上特点或patch的对应关系。利用相机的成像几何模型(包括相机参数)以及约束,可以求出两帧之间的运动信息(旋转矩阵R和平移t)。这样我们就可以得到一系列的相机相对变化矩阵,从而可以推出相机的姿态信息。
做了什么
这里构造了一个轻量级框架,能实现对地面的精确稳健的估计,框架包括用于在地平面上选择高质量点的地面点提取算法,以及用于在局部滑动窗口中连接提取的地面点的地面点聚集算法,主要优点就是能提取出高质量的地面点。
怎么做
首先仍然是问题定义和符号定义
 为第t帧的SO(3),由旋转矩阵Rt∈R3×3和平移向量Tt∈R3组成
为第t帧的SO(3),由旋转矩阵Rt∈R3×3和平移向量Tt∈R3组成
 为第t-1至t的相对位姿转换,也就是前面的SO(3)的相对版
为第t-1至t的相对位姿转换,也就是前面的SO(3)的相对版
K表示相机的内有矩阵
xi表示相机帧上的3D点,ui表示相机帧投影到平面上的2D点
h,h+,h分别为由图像特征估计的摄像机高度,由尺度恢复得到的摄像机高度,真实的摄像机高度
任务描述:输入是一个连续的图像帧,目标是估计相机的相对位姿转换,然后通过相机高度h还原轨迹,也就是说,任务目标就是得到摄像机高度h+
由于这里是单目相机,最重要的就是恢复图像内的尺度信息,也就是2D不具备的深度信息

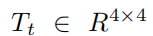
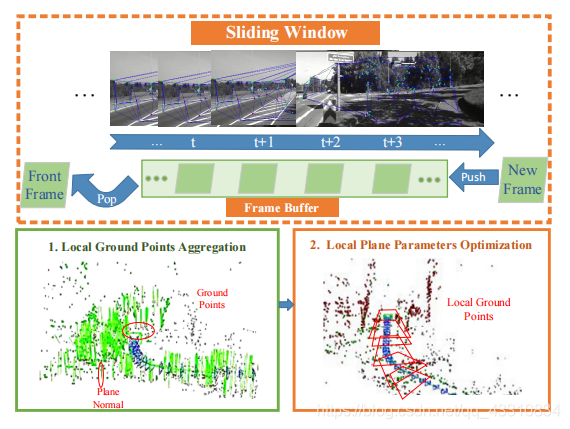
整个框架由两个部分组成,第一部分是MVO部分,输入连续图像,估计当前的相机位姿转换,这里使用了一些现有框架来进行,如ORB-SLAM2框架。第二部分是尺度恢复部分,使用GPE和GPA等算法。
简单来说,主要步骤是通过第一部分输出相机位姿转换,这是一个初始化值,第二部分通过这个位姿转换和算法得到的尺度来进行位姿修复。
在图中也有步骤的分解
绿框内就是MVO部分,初始化一个位姿转换
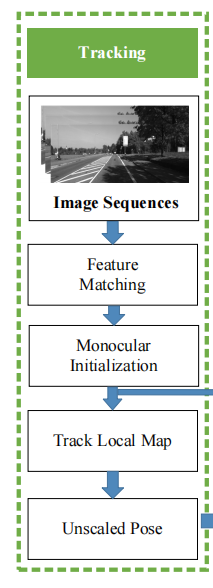
主要是后面的红框和橙框,两者组成了第二部分尺度恢复部分
首先是红框部分,对于当前的图像帧,用Delaunay Triangulate(三角剖分法)这个方法将匹配的特征点分割成一系列三角形
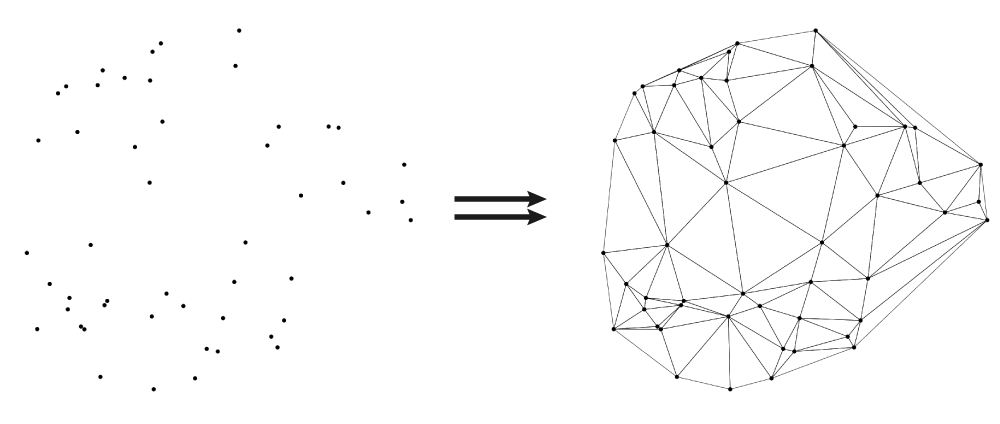
然后将这些三角形反投影到相机框架中,来寻找地面点
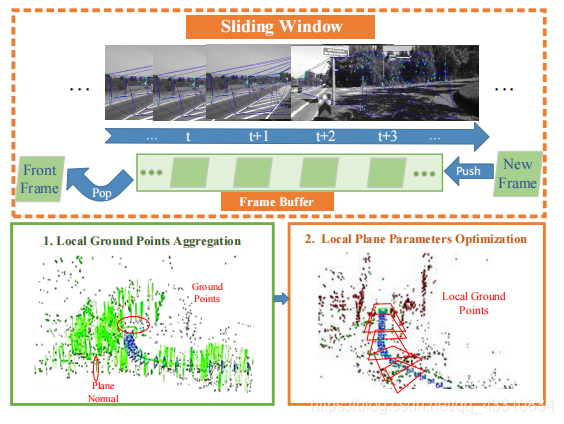
然后是橙框部分
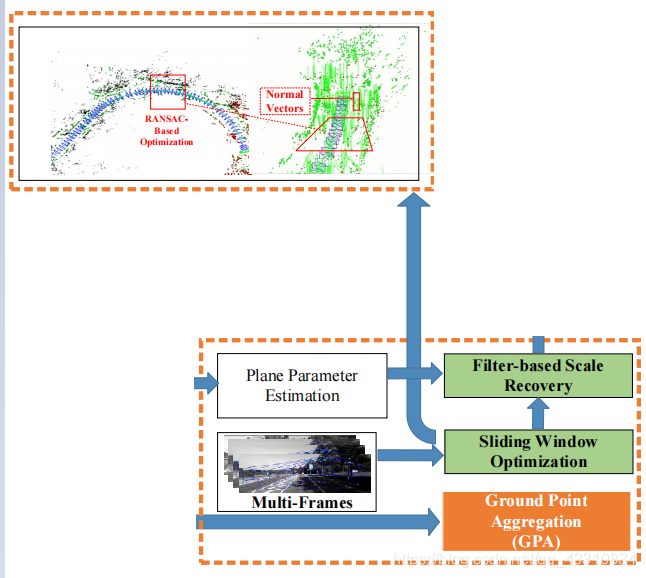
用滑动窗口和GPA来聚集局部地面点,这两个框的具体在后面会解释
然后就是具体细节的实现部分
首先是地面点估计,也就是红框部分的实现,GPE
输入是匹配的特征点uit,就是对于当前t帧图像帧,用三角剖分法将每个特征点作为顶点建立三角形,然后反投影到图像帧上
定义反投影的顶点为xijt,每个三角形的法向量为

满足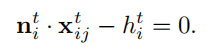
这是常见的几何约束,也就是说对于每个反投影点x存在的三角形都有这么一个约束,用法向量可以将点全部约束到一个维度上,简单来说就是可以估算这个i三角形的高度h
除此之外还添加了两个约束,
这里的理解就是三角形的高度是大于地面的,因为摄像头是安装在车之上的
这样整个图像帧会存在多个三角形,而这里需要的仅仅是地面三角形,因为这些是用来估计地面参数地面点的
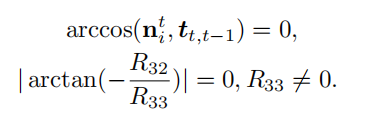
这里的意思就是,对于地面三角形的法向量,它应该是和相机位姿转换中的平移向量t是垂直的,这个很好理解,然后是下面那个,这里的意思是摄像机的俯仰角应该为0,这个是因为摄像机是在平移的车上进行移动的,高度不会产生变化,这就是两个地面三角形估计的约束
对于满足上述约束的三角形,就可以视为地面三角形
而地面三角形的顶点x,就被视为地面点
然后再把被多个三角形共享的重复点去掉成单独点,除此之外还要消除一些移动平面物体的混淆点之类的,这里用了RANSAC的方法最小化平面函数
这个优化公式的意思就是最小化地面点和相机的高度差
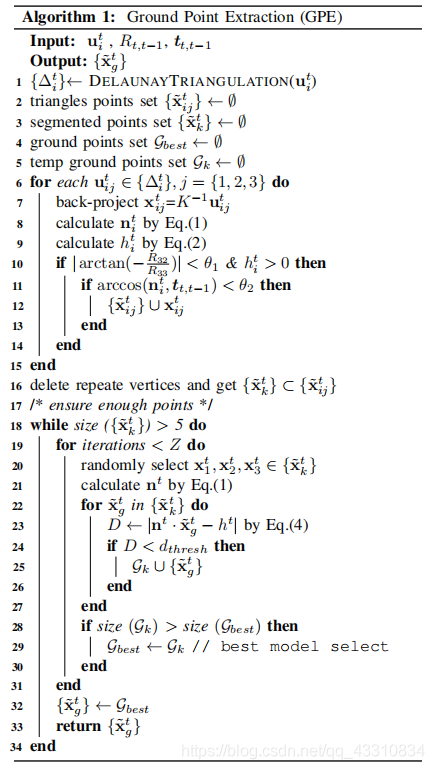
GPE的整体流程是这样的,相当复杂啊,大致理解一下过程,第一步三角形化匹配特征点,第二步将特征点反投影到图像帧,然后计算三角形法向量和高度之类的东西,这里有用到前面说的一些几何约束,第三步就是获取地面点,方法就是优化那个最小化函数,然后强化一下这些点,随机选3个点,组一个平面,计算剩余点到平面的距离,重复Z次保留最小距离的点
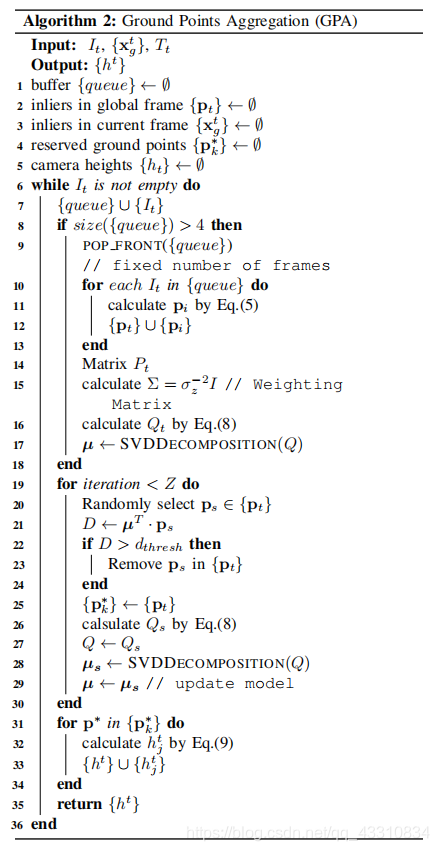
然后是地面点聚合,也就是橙框部分的实现,GPA
GPA的作用就是在连续帧中聚合地面点,这是对前面初步得到的地面点的一种细化吧可以说是,首先这里的连续图像帧是通过滑动窗口得到的,其实就是选局部序列输入
从前一个部分MVO部分和红框部分中可以得到初始化的位姿转换Tt和每帧的内联点xgt也就是地面点
然后就可以将每个内联点转换到全局帧框架上
然后构造了一个缓冲区,当前窗口中的一些信息比如地面点位姿转换之类的都存着,每个时间步长随着新图像帧来了就更新缓冲区,用最小二乘法更新估计地平面
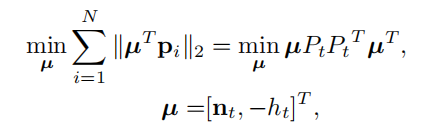
这里的N是缓冲区的局部地面点数,这里的意思是最小化这些点的平面距离差,其中大P是这N个点的pi组成的
将这个式子改写一下

然后就可以用SVD进行优化了
最终就可以得到全局平面,有了这个平面就可以计算相机相对高度了
pc是It帧的相机中心
至此,通过GPA就能得到一个全局的平面,通过这个平面计算得到了相对的相机高度h,这个h就是最前面的问题定义中所需要的
这里也相当复杂,简单看一下,其实就是使用最小二乘法更新局部缓冲区得到的平面,这个平面是由前面部分的地面点聚合得到的
最后的最后是蓝框部分,尺度恢复部分
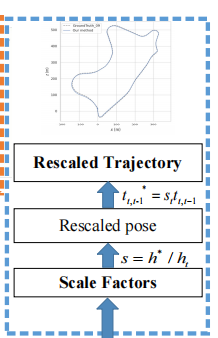
通过前面计算得到了每帧的摄像机相对高度h+,然后就可以对轨迹进行一个尺度恢复
这里的st是比例因子
这里的h*是真实高度,然后就可以通过这个比例因子对平移t进行尺度缩放
总结
1.效果相当不错的一个VO问题,就像很多VO做的是解决尺度缩放的问题,采用的是一个摄像机高度和地面高度的比例,整体看上去甚至感觉没有什么可以做改进的地方,感觉可以入手的就是地面估计这一块了


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









