






 本文详细剖析了HashMap的数据结构、实现原理及关键方法,包括put、get、数组扩容等过程,探讨了容量、负载因子对性能的影响。
本文详细剖析了HashMap的数据结构、实现原理及关键方法,包括put、get、数组扩容等过程,探讨了容量、负载因子对性能的影响。
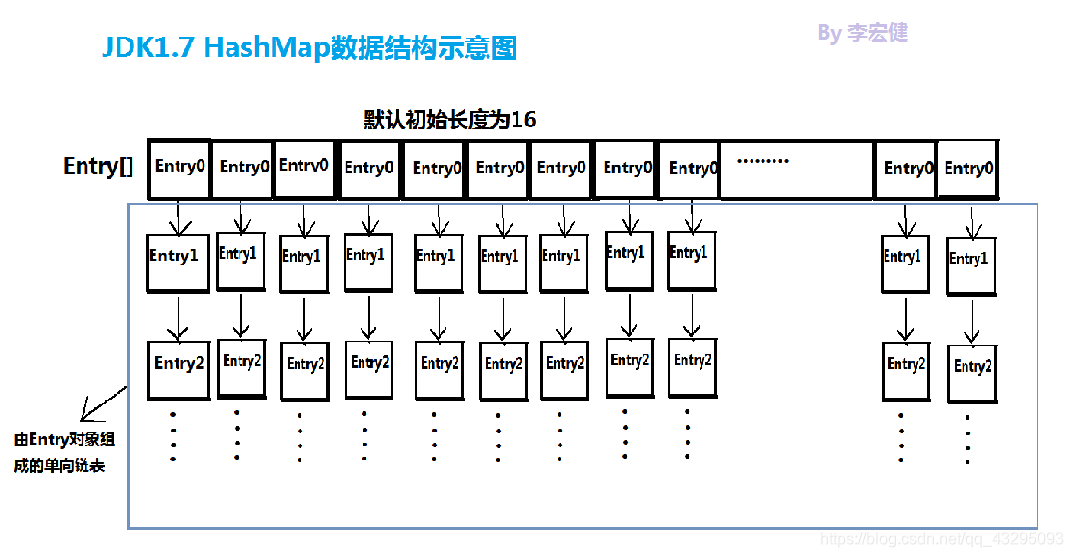
数据结构
HashMap中的数据结构是数组+单向链表的组合,以键值对(key-value)的形式存储元素,通过put()和get()方法存储和获取元素
实现原理
成员变量
//默认初始容量
static final int DEFAULT_INITIAL_CAPACITY = 16;
//最大初始容量容量,2^30
static final int MAXIMUM_CAPACITY = 1 << 30;
//负载因子,默认0.75,负载因子越小,hash冲突率越低
static final float DEFAULT_LOAD_FACTOR = 0.75f;
//一个Entry类型的数组
transient Entry<K,V>[] table;
//HashMap实际存储的元素个数
transient int size;
//临界值(HashMap实际能存储的大小),公式为(threshold=capacity * loadFactor)
int threshold;
//负载因子
final float loadFactor;
//HashMap的结构被修改的次数--结构修改是指改变HashMap中映射的数量,或者以其他方式修改其内部结构
transient int modCount;
Entry的结构
static class Entry<K,V> implements Map.Entry<K,V> {
final K key;
V value;
Entry<K,V> next;
int hash;
/**
* Creates new entry.
*/
Entry(int h, K k, V v, Entry<K,V> n) {
value = v;
next = n;
key = k;
hash = h;
}
public final K getKey() {
return key;
}
public final V getValue() {
return value;
}
public final V setValue(V newValue) {
V oldValue = value;
value = newValue;
return oldValue;
}
public final boolean equals(Object o) {
if (!(o instanceof Map.Entry))
return false;
Map.Entry e = (Map.Entry)o;
Object k1 = getKey();
Object k2 = e.getKey();
if (k1 == k2 || (k1 != null && k1.equals(k2))) {
Object v1 = getValue();
Object v2 = e.getValue();
if (v1 == v2 || (v1 != null && v1.equals(v2)))
return true;
}
return false;
}
public final int hashCode() {
return (key==null ? 0 : key.hashCode()) ^
(value==null ? 0 : value.hashCode());
}
public final String toString() {
return getKey() + "=" + getValue();
}
/**
* This method is invoked whenever the value in an entry is
* overwritten by an invocation of put(k,v) for a key k that's already
* in the HashMap.
*/
void recordAccess(HashMap<K,V> m) {
}
/**
* This method is invoked whenever the entry is
* removed from the table.
*/
void recordRemoval(HashMap<K,V> m) {
}
}
put过程分析
public V put(K key, V value) {
//判断key值是否为null,如果为null调用putForNullKey(v)方法,见下方代码
//key为null的元素,会被放到table[0],且table[0]的链表只有一个元素
if (key == null)
return putForNullKey(value);
//计算key的hash值
int hash = hash(key);
//计算key要存放的桶的位置
int i = indexFor(hash, table.length);
//判断通的位置是否有元素
for (Entry<K,V> e = table[i]; e != null; e = e.next) {
Object k;
//如果有元素判断key是否相等(hash值相同并且对象相同),如果key相等直接覆盖,并返回旧值
if (e.hash == hash && ((k = e.key) == key || key.equals(k))) {
V oldValue = e.value;
e.value = value;
e.recordAccess(this);
return oldValue;
}
}
modCount++;
//见下方
addEntry(hash, key, value, i);
return null;
}
private V putForNullKey(V value) {
//将数组中的第0位上的Entry对象拿出来,判断是否为null(是否已经有元素)
for (Entry<K,V> e = table[0]; e != null; e = e.next) {
//如果不为null,则将对象的value值进行覆盖,并将旧值返回。
if (e.key == null) {
V oldValue = e.value;
e.value = value;
//此方法是更新HashMap
e.recordAccess(this);
return oldValue;
}
}
modCount++;
//如果该位置上的链表上没有元素,则执行addEntry()方法
//1参:hash值;2参:键;3参:值;4参:桶的位置
addEntry(0, null, value, 0);
return null;
}
void addEntry(int hash, K key, V value, int bucketIndex) {
//判断当前HashMap的大小是否达到扩容的阈值,并且要插入的数组位置已经有元素了,则进行扩容
if ((size >= threshold) && (null != table[bucketIndex])) {
//扩容,后边说
resize(2 * table.length);
//扩容之后,重新计算key的hash值
hash = (null != key) ? hash(key) : 0;
//重新计算扩容后新的下标
bucketIndex = indexFor(hash, table.length);
}
//见下方
createEntry(hash, key, value, bucketIndex);
}
void createEntry(int hash, K key, V value, int bucketIndex) {
//取出当前数组位置的链表
Entry<K,V> e = table[bucketIndex];
//创建一个Entry对象,把新对象放到链表的表头,并将新对象的next指向就只
table[bucketIndex] = new Entry<>(hash, key, value, e);
size++;
}
数组扩容
在插入心智的时候,如果当前size已经达到了扩容的阈值,并且要插入的位置上已经有了元素,那么就会出发扩容,扩容后,数组的大小为原来的2倍
void resize(int newCapacity) {
//获取当前数组
Entry[] oldTable = table;
int oldCapacity = oldTable.length;
//如果当前数组的容量达到最大扩容容量
if (oldCapacity == MAXIMUM_CAPACITY) {
//则将扩容阈值设置为Integer.MAX_VALUE并返回
threshold = Integer.MAX_VALUE;
return;
}
//创建一个新的数组,数组的容量为旧容量的2倍
Entry[] newTable = new Entry[newCapacity];
boolean oldAltHashing = useAltHashing;
//计算是否需要对键重新进行哈希码的计算
useAltHashing |= sun.misc.VM.isBooted() &&
(newCapacity >= Holder.ALTERNATIVE_HASHING_THRESHOLD);
boolean rehash = oldAltHashing ^ useAltHashing;
/*
*将原有所有的桶迁移至新的桶数组中
*在迁移时,桶在桶数组中的绝对位置可能会发生改变
*这就是为什么HashMap不能保证存储数据的顺序会发生变化的原因
*/
transfer(newTable, rehash);
table = newTable;
//重新计算扩容阈值
threshold = (int)Math.min(newCapacity * loadFactor, MAXIMUM_CAPACITY + 1);
}
transfer方法
void transfer(Entry[] newTable, boolean rehash) {
int newCapacity = newTable.length;
for (Entry<K,V> e : table) {
while(null != e) {
Entry<K,V> next = e.next;
if (rehash) {
e.hash = null == e.key ? 0 : hash(e.key);
}
int i = indexFor(e.hash, newCapacity);
e.next = newTable[i];
newTable[i] = e;
e = next;
}
}
}
get过程分析
相对于put过程,get过程是非常简单的
- 根据key计算hash值
- 找到相应的数组下标:hash&(length-1)
- 遍历该数组位置处的链表,直到找到相等(==或equals)的key
public V get(Object key) {
//判断key是否为null,如果为null则直接去table[0]的位置取,并返回
if (key == null)
return getForNullKey();
//见下方
Entry<K,V> entry = getEntry(key);
return null == entry ? null : entry.getValue();
}
private V getForNullKey() {
for (Entry<K,V> e = table[0]; e != null; e = e.next) {
if (e.key == null)
return e.value;
}
return null;
}
final Entry<K,V> getEntry(Object key) {
//获取当前key的hash
int hash = (key == null) ? 0 : hash(key);
//获取桶位置的链表,循环遍历链表上的值
for (Entry<K,V> e = table[indexFor(hash, table.length)];
e != null;
e = e.next) {
//如果不为空
Object k;
//如果key完全相同,则返回
if (e.hash == hash &&
((k = e.key) == key || (key != null && key.equals(k))))
return e;
}
//如果桶位置为空,则返回null
return null;
}
hash算法
我们可以看到在HashMap中要找到某个元素,需要根据key的hash值来求的对应数组中的位置。如何计算这个位置就是hash算法。
/**
* Returns index for hash code h.
*/
static int indexFor(int h, int length) {
return h & (length-1);
}
性能问题
HashMap有两个参数影响其性能:初始容量和负载因子。都可以通过构造方法指定大小。
容量capacity是HashMap中的bucket哈希桶(Entry的链表)的数量,初始容量只是HashMap在创建时的容量,最大设置的初始容量为2^30,默认初始容量是16(必须为2的幂),为什么要规定容量要为2的幂呢?
HashMap的数据结构是数组+单链表的组合,我们洗完过的是元素存放的更均匀,最理想的效果是,Entry数组中的每个位置都有一个元素,这样查询的时候效率最该,不需要遍历单链表,也不需要通过equals去比较Key,而且空间利用率最大。那么如何计算才会分布最均匀呢?我们首先想到的就是%取余运算,哈希值%容量=bucketIndex
源码中是这么做的
static int indexFor(int h,int length){
//这里的h为key调用hashCode方法计算出来的hash值,length为目前的容量
return h&(length-1);
}
当容量是2的幂次方的时候,h&(length-1)=h%length,位运算的速度又比%运算快很多,所以规定容量是2的幂次方。因此也是为了解决hash冲突问题,也是为了解决采用2进制运算才规定容量是2的幂次方。
负载因子loadFactor是HashMap在其扩容之前可以达到多满的一种尺度,默认是0.75,尺度大小为(loadFactor*capacity)
扩容问题
数组扩容之后,原数组中的数据必须重新计算其在新数组中的桶的位置,并放进去,这个操作特别消耗性能,如果我们已经预知HashMap中元素的个数,那么预设初始容量能够有效的提高HashMap的性能。
线程安全问题
HashMap是线程不安全的,在多线程情况下直接使用HashMap会出现一些莫名其妙不可预料的问题。
小问题
HashMap所有集合类视图所返回的迭代器都是快速失败的(fail-fast),在迭代器创建之后,如果从结构上对映射进行修改,除非通过迭代器自身的remove或add方法,其他任何时间任何方式的修改,迭代器都会抛出ConcurrentModificationException。



















 1530
1530

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











