




 本文深入探讨了灰度图像重构的原理与应用,从连通域定义到基于距离的重构,再到灰度图像的阈值叠加,逐步解析灰度重构过程。通过对比二值图像重构,阐述了灰度重构的独特之处及其在图像处理中的重要性。
本文深入探讨了灰度图像重构的原理与应用,从连通域定义到基于距离的重构,再到灰度图像的阈值叠加,逐步解析灰度重构过程。通过对比二值图像重构,阐述了灰度重构的独特之处及其在图像处理中的重要性。
论文作者:Luc Vincent
论文符号定义:
图像I是离散平面Z2的有限矩形子集DI到离散灰度集的映射{0,1,…,N-1}。二进制图像I只能是0或者1这两个值中一个。在本文中,经常使用Z2来代替二进制离散集合。类似的,灰度图被看成函数或者映射。
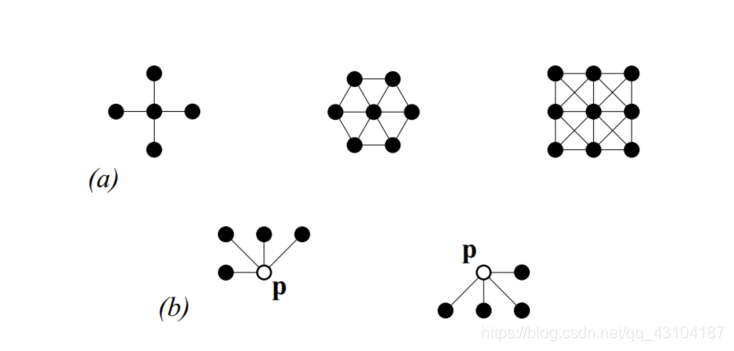
离散网格G包含于Z2Z2*提供了像素之间的邻域关系。当且仅当(p,q)属于G时,p和q是邻域关系。这篇文章我们将使用4邻域或者8邻域或者如图2所示的六角形网格。不过请注意,下面描述的算法适用于任何维度,任何尺寸的网格。
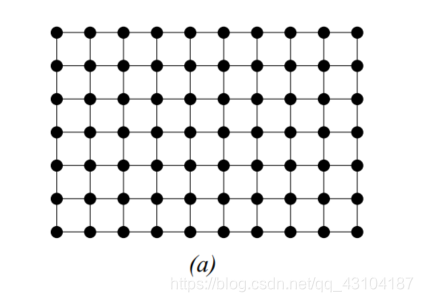
4邻域
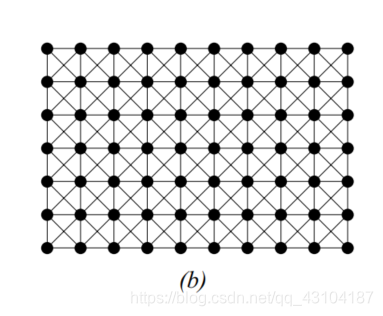
8邻域
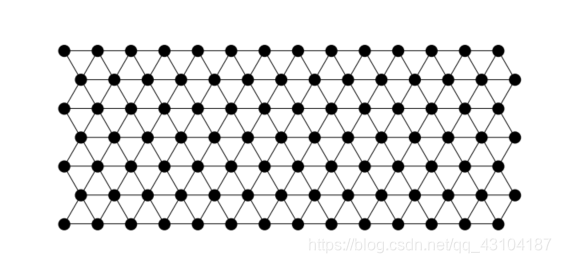
六角形
在Z2上的G的距离dG:dG(p,q)表示为像素p到像素q穿过的网格边的最小数量。在4邻域中这被称作城区距离,在8邻域中这被称为棋盘距离。我们用NG§表示在网格G上p的邻域集合。
1 Reconstruction for binary images
1.1 Defination in terms of connected components
I 和 J 是同一个离散定义域 D 上的两个二值图像,使得J包含于I。
从映射的角度看,这意味着对于任意的J§ = 1 有I§ = 1。J为标记图像,I为遮罩。定义I1,I2,…In为I的连通域。

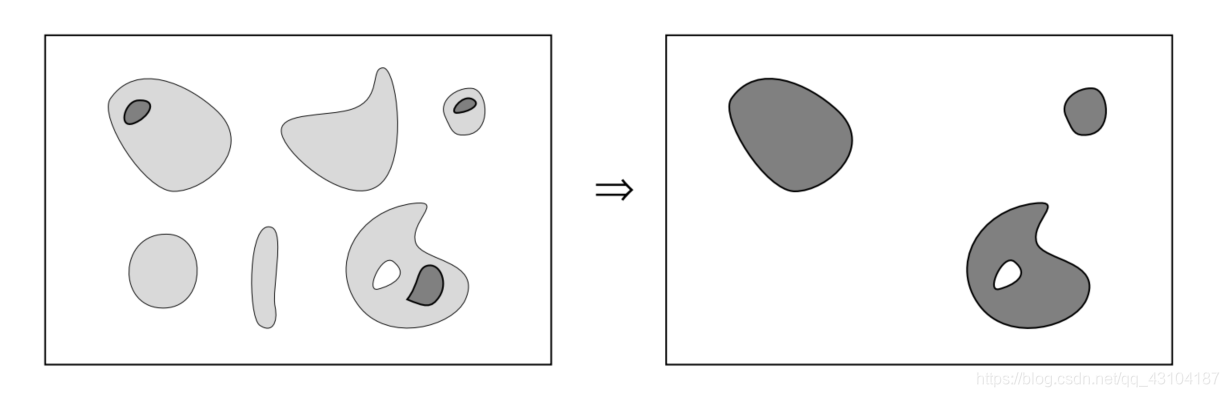
我的理解是J是左图中深色部分,I是左图中浅色部分。两图交集为深色部分,在I中与两者交集有关联的有三个连通域,从标记到连通域的重构就是由两者的交集为种子,生长满其所在的连通域,
这个概念非常简单,但却产生了一些很有趣的应用程序和扩展。
1.2 Definition in terms of geodesic distance
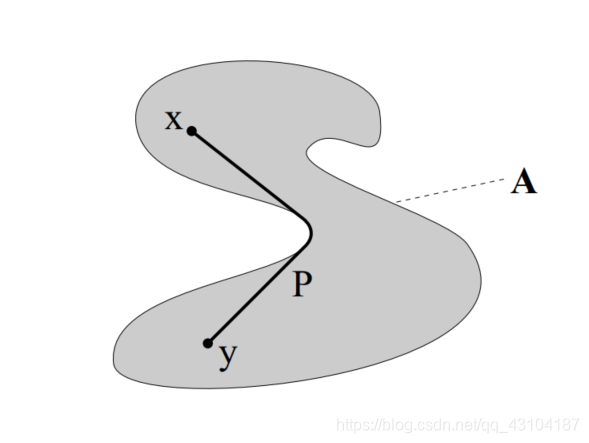
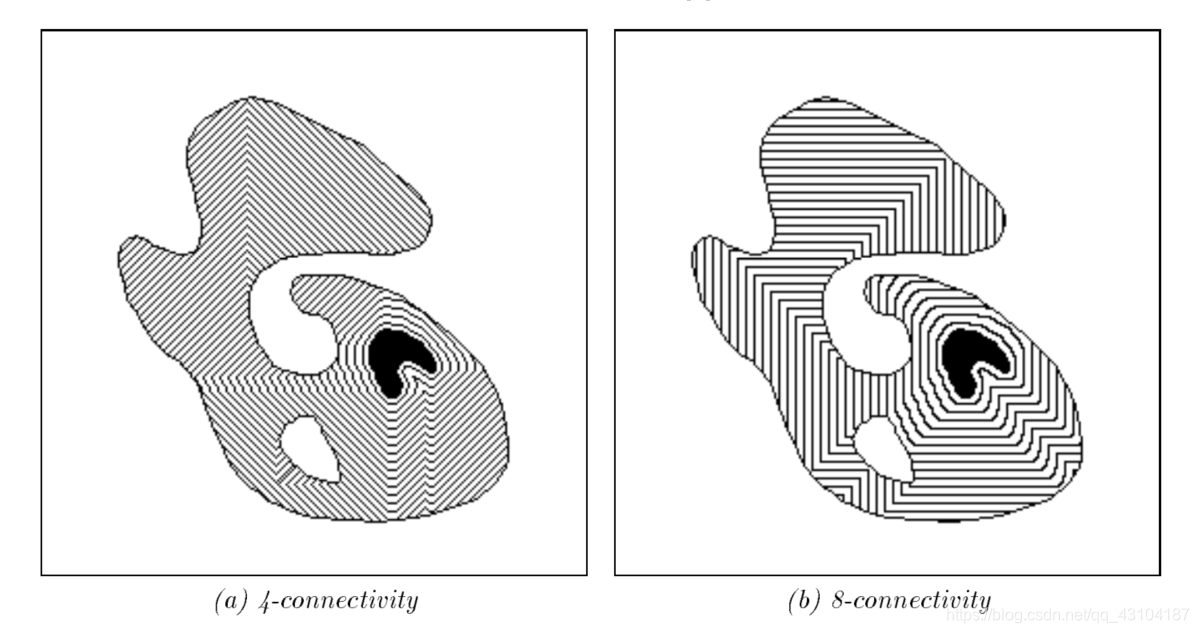
大部分时间描述重构的定义都是通过距离的概念。给定(mask)集合X,像素p和像素q之间的距离是集合X中包含的连接p与q的最短路径的长度。值得注意的是(Mask)X中的距离取决于所使用的连接类型。
1981年,Lantu ejoul和Beucher 在图像分析框架中引入了距离,它是几种形态学算子的基础。可以利用以下定义膨胀(腐蚀类似):


腐蚀和膨胀(距离定义)
曲面上两点间距离最短的线:geodesic
模拟种子点生长,膨胀再与MASK的交集。
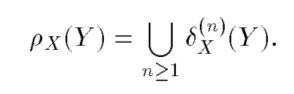
在Mask X内对集合Y执行连续的膨胀,与Y交集不为空的X的连通域将逐渐被填满。从而给出如下定义:

1.3 Grayscale reconstruction
1.3.1 Definition using threshold superposition
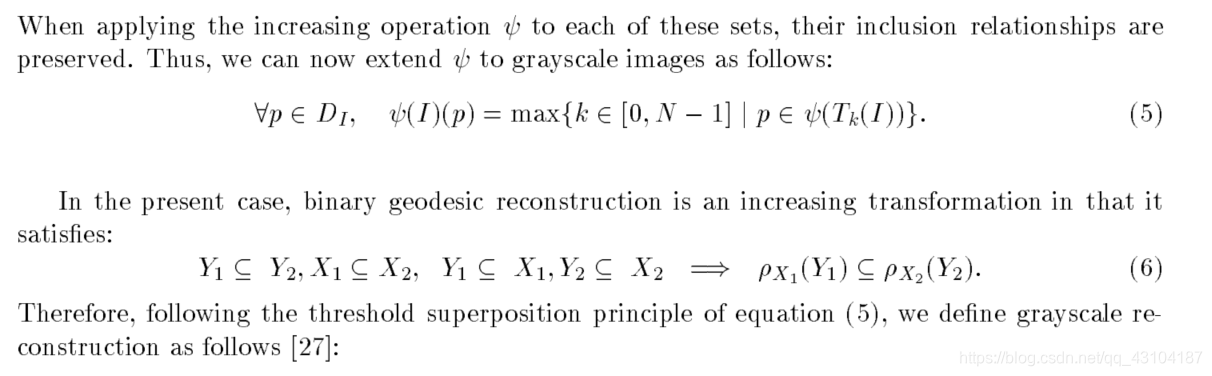
近几年来可知,至少在离散领域,在二值图像上的任何新增的变换都可以扩展到灰度图像上。所谓的扩展指的是:
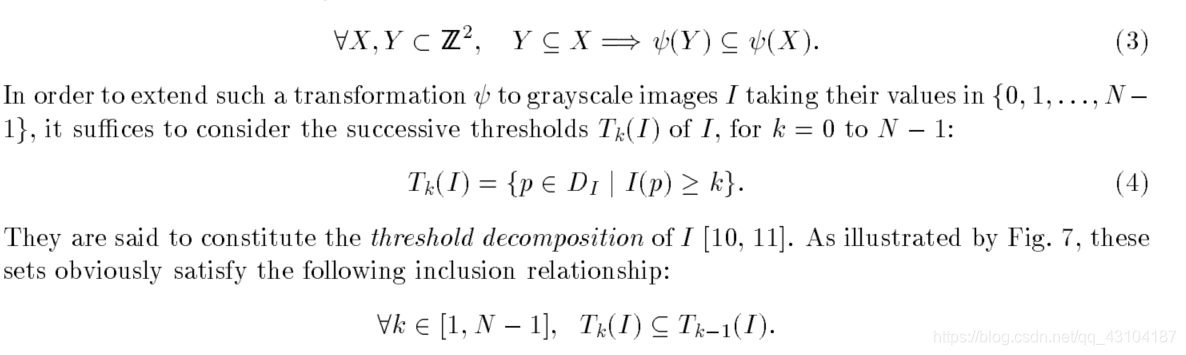
(这一段我翻译太差)大体可以理解为越高的阈值的二值化区域是低阈值的子集。

灰度重构更贴近真实世界的图像处理,如何做出h-dome变换依赖于灰度重构。(h-dome方法是我看这篇文章的目的),这里需要加深理解。
简单总结一下:
论文中首先定义了4-邻域,8邻域和六角形邻域,dG是p与q的最短距离,The elementary ball in distance dG is denoted BG , or simply B,NG§是p的邻域。
其次定义了连通域,Let I1, I2, … , In be the connected components of I.I数字代表其连通域中的各个元素。

这是标记图像J到掩膜图像I的重构。
第三段定义了最短距离的概念,并用距离的概念描述了基于腐蚀膨胀的重构操作。

距离运算。

Y为标记图像,Y包含于X,p是X中的点,求取p到Y的距离小于n的集合。
二值图像重构定义:
基于上面的距离概念给出了Y对X的重构
注意:

重构运算

距离运算
在回顾了每个运算符代表的含义之后,再重新理解灰度重构的定义:
首先为了将图像重构概念从二值扩展到灰度图像,引入了


它表示的是图像I中灰度值大于k的点的集合。
T0(I)代表所有灰度值大于0的点的集合,以此类推。
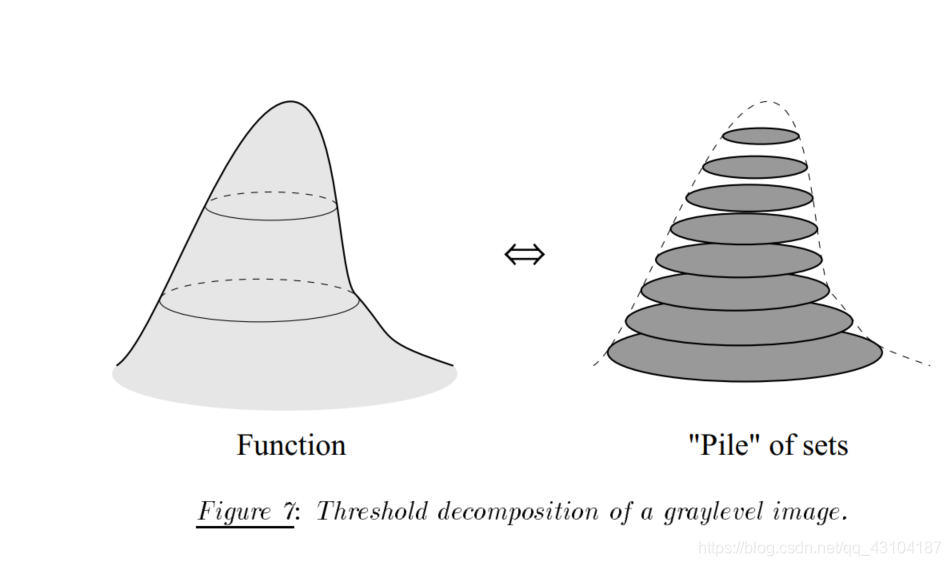
这些阈值将I分层,如下图所示:
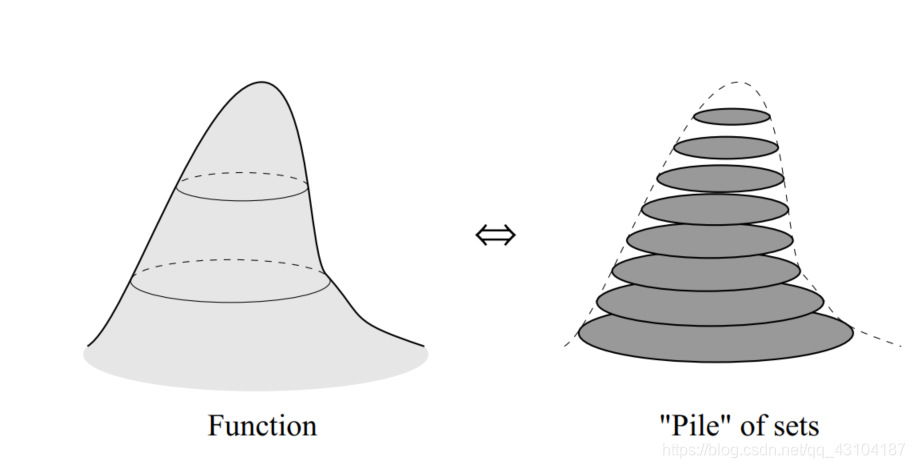
这些集合之间满足如下的包含关系:

对于这个集合组中的每一个集合的运算仍满足上述包含关系:

那么对于二值图像来说,这个关系可以反应为:

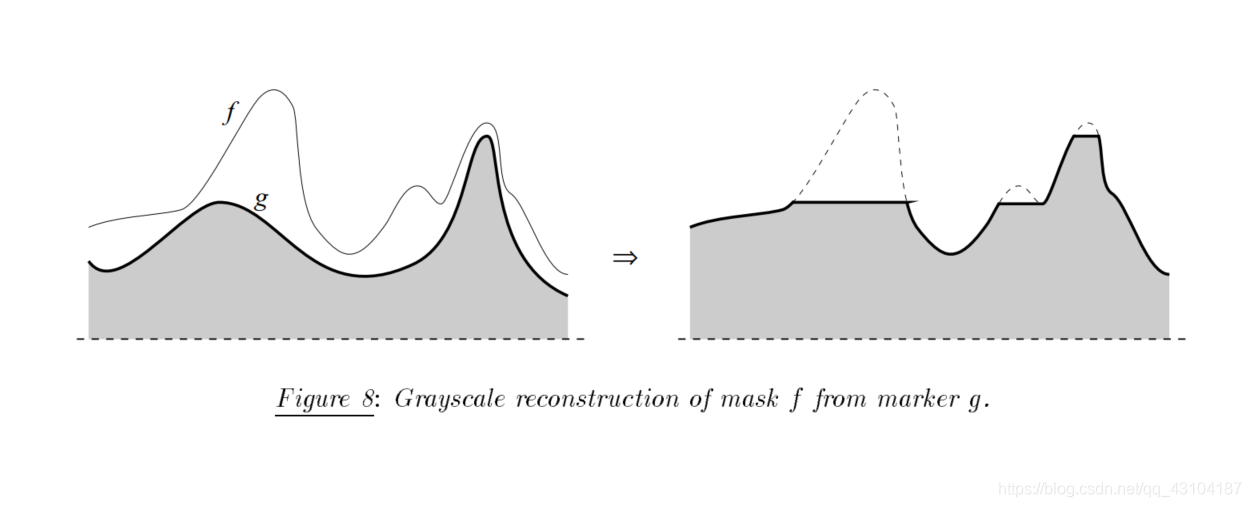
Definition (grayscale reconstruction)
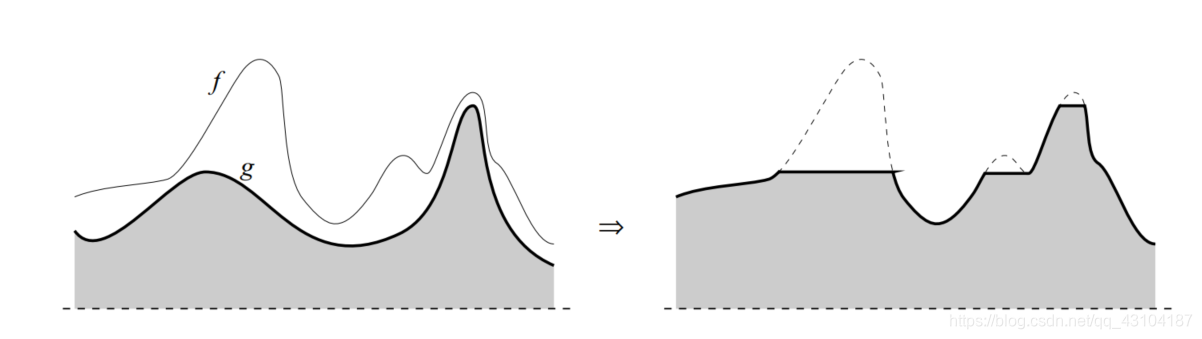
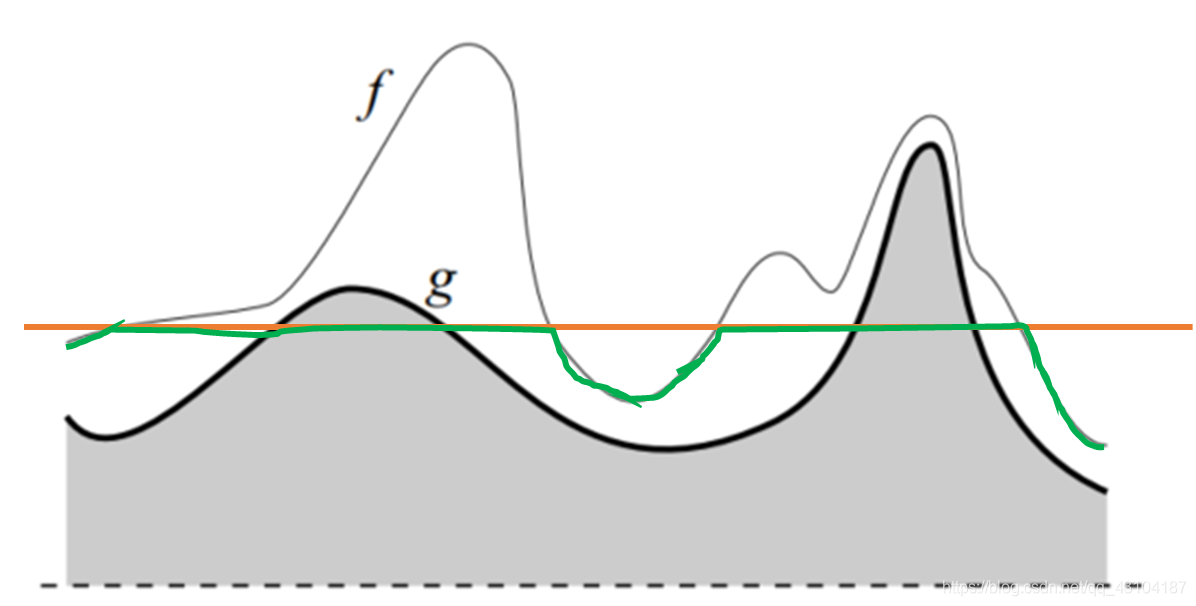
J 和 I 是相同定义域上的两张灰度图像,以离散集合 {0,1,…,N-1} 获取两张图像的灰度值,并且J <= I。从 J 到 I 的灰度重建为:

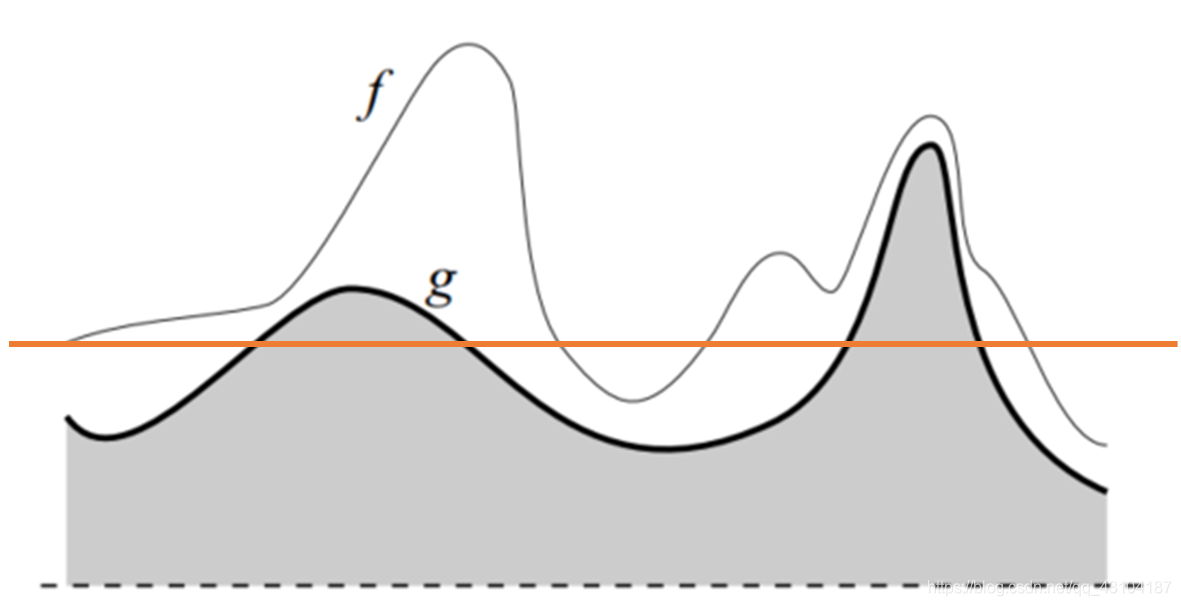
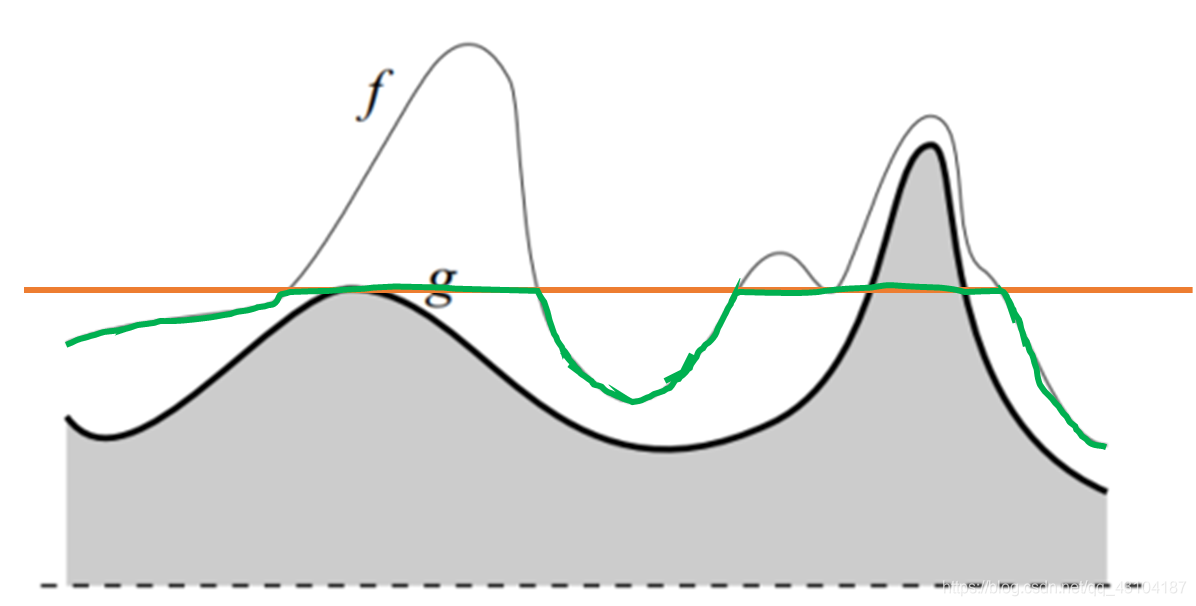
下图说明了这种转换。 就像二进制重建提取标记的marker的那些相连的元素一样,灰度重建提取标记图像标记的marker的峰值。
还是不太明白,虽然单独拿出来的二值化重构很好理解,但灰度我无法去想像会怎样发展,那个max啥意思???最大的k???。按照概念一步一步模拟着推一下。
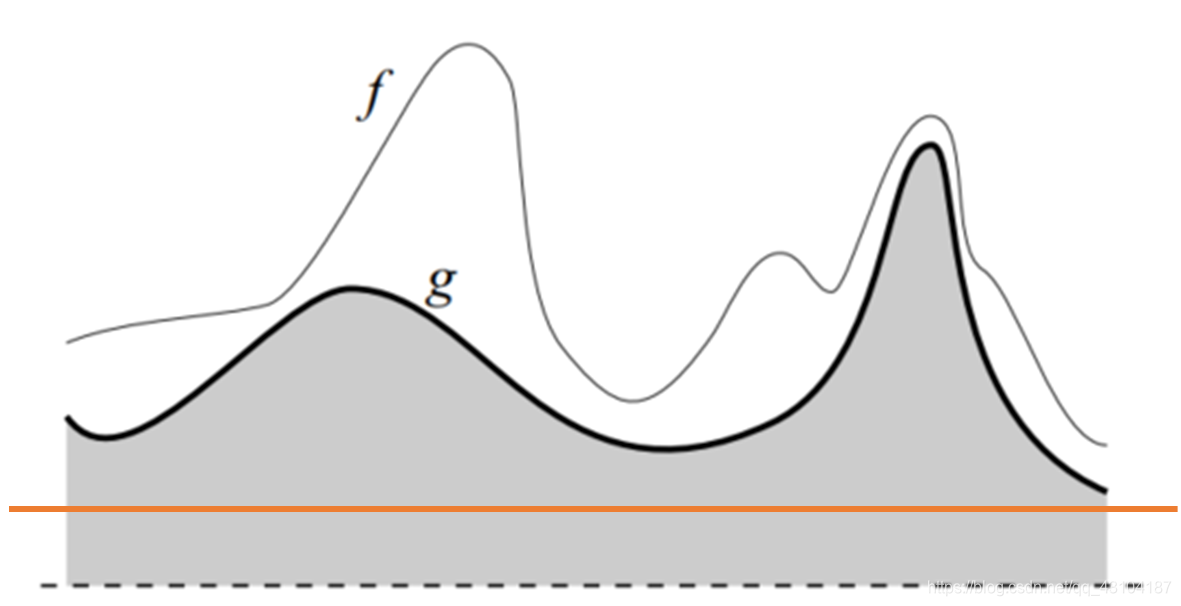
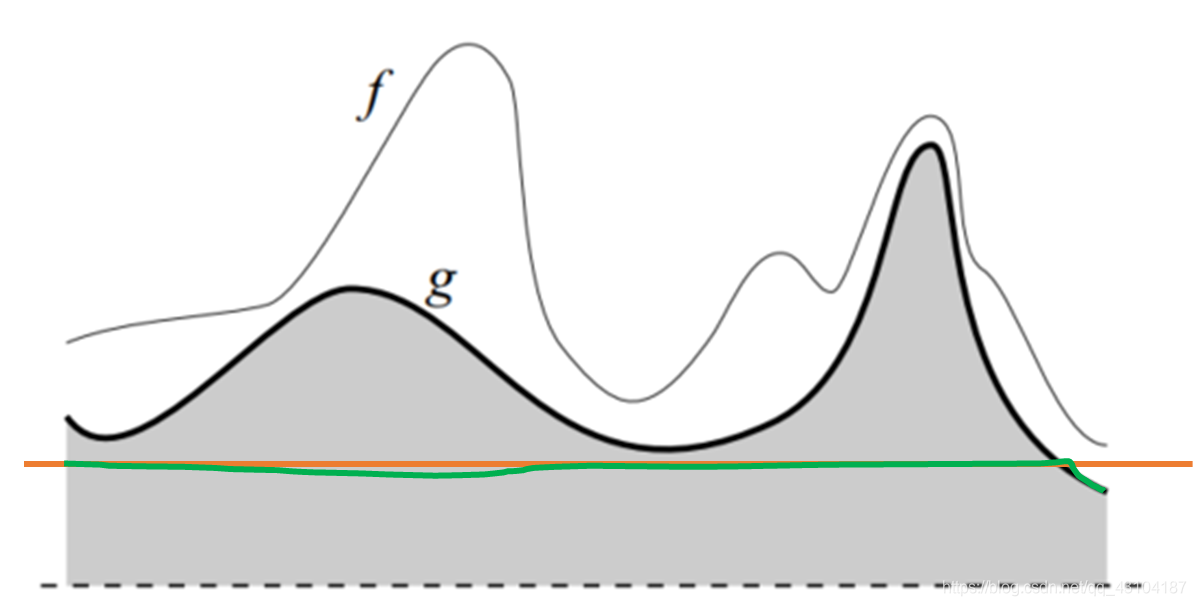
当阈值选择完毕之后,上方值为1,下方值为0,上图选择为全1图,无需重构。
阈值向上增长:
f 图除了最右边一点值为0外全为1,g图为1的值与f重叠,g对f的重构无改变。
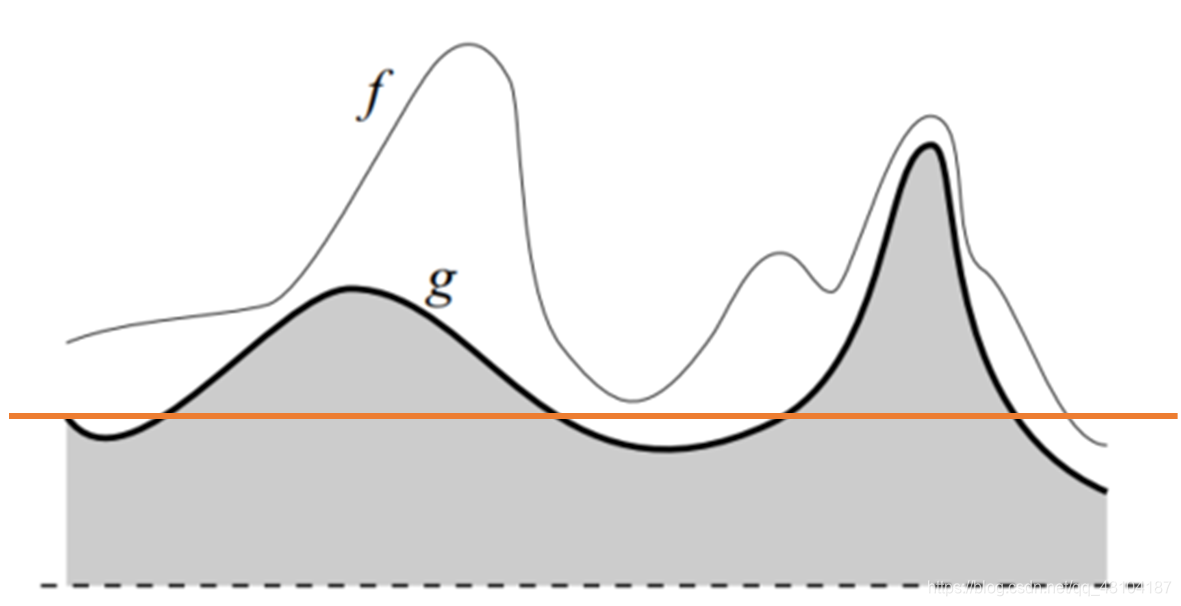
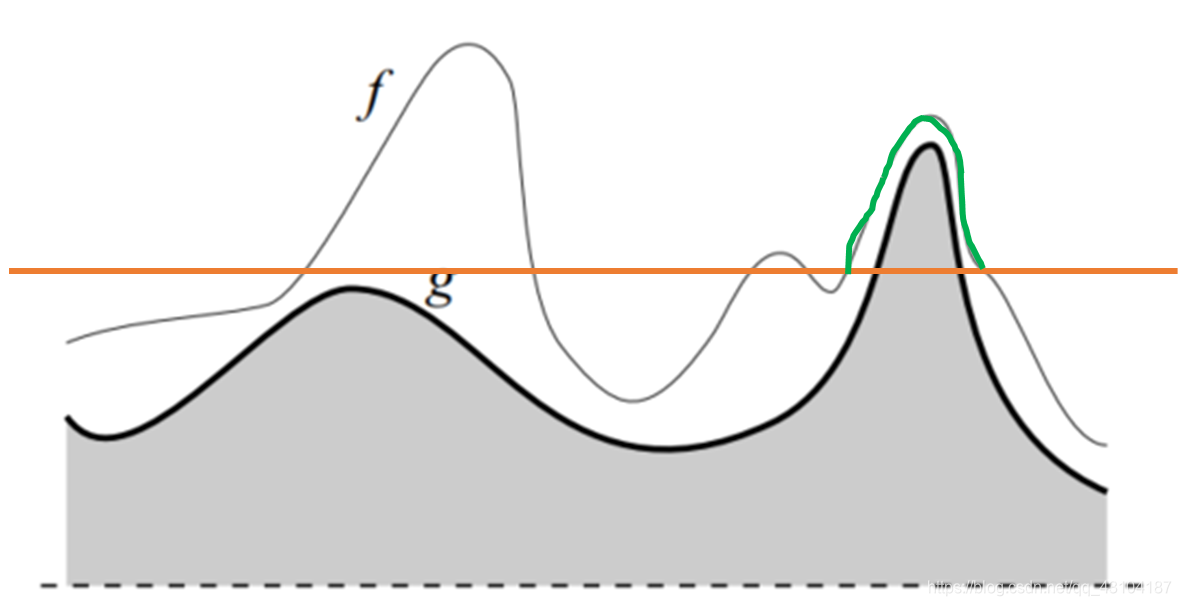
阈值继续向上:
阈值将分为4部分,分别是1,0,1,0。此时g对f的重构为:
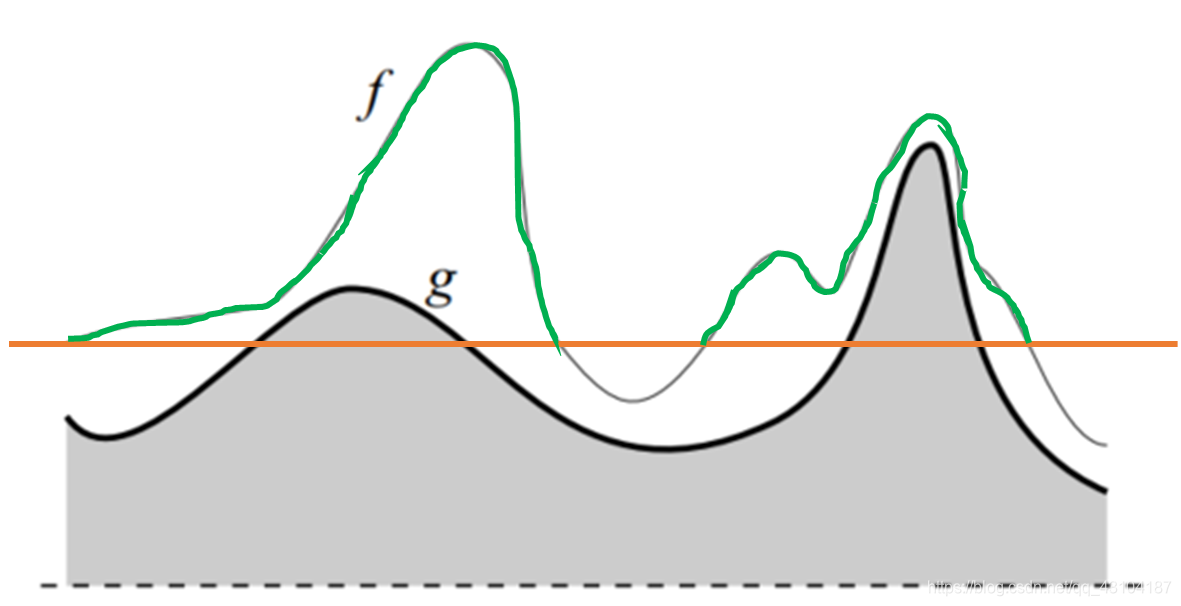
绿色部分为1,其余为0。
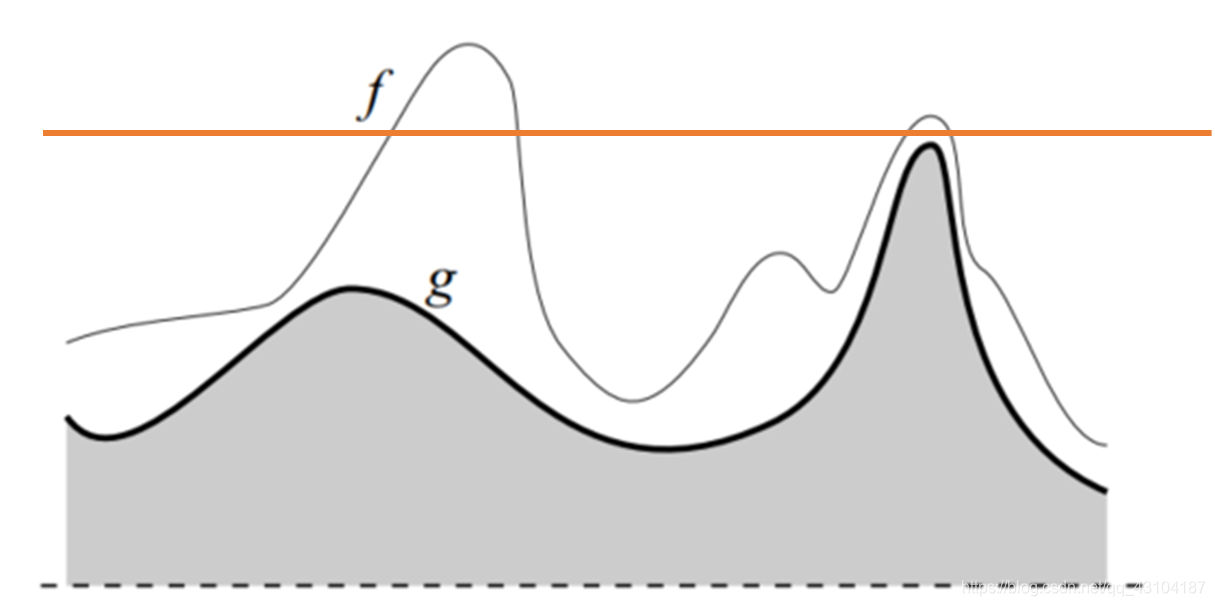
阈值再往上:
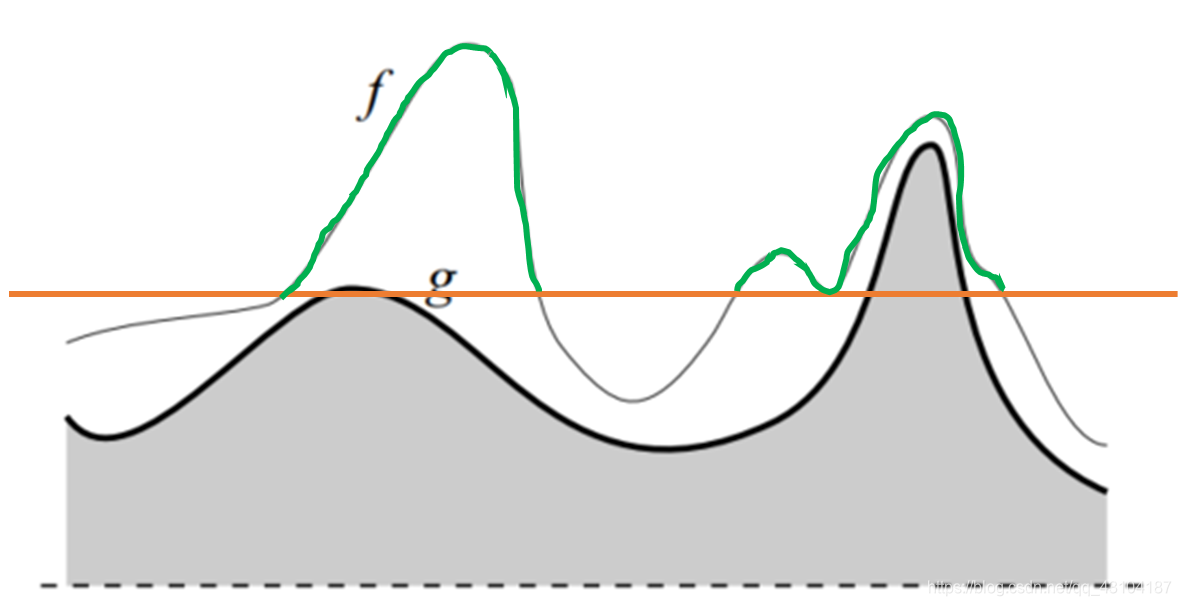
阈值再往上:
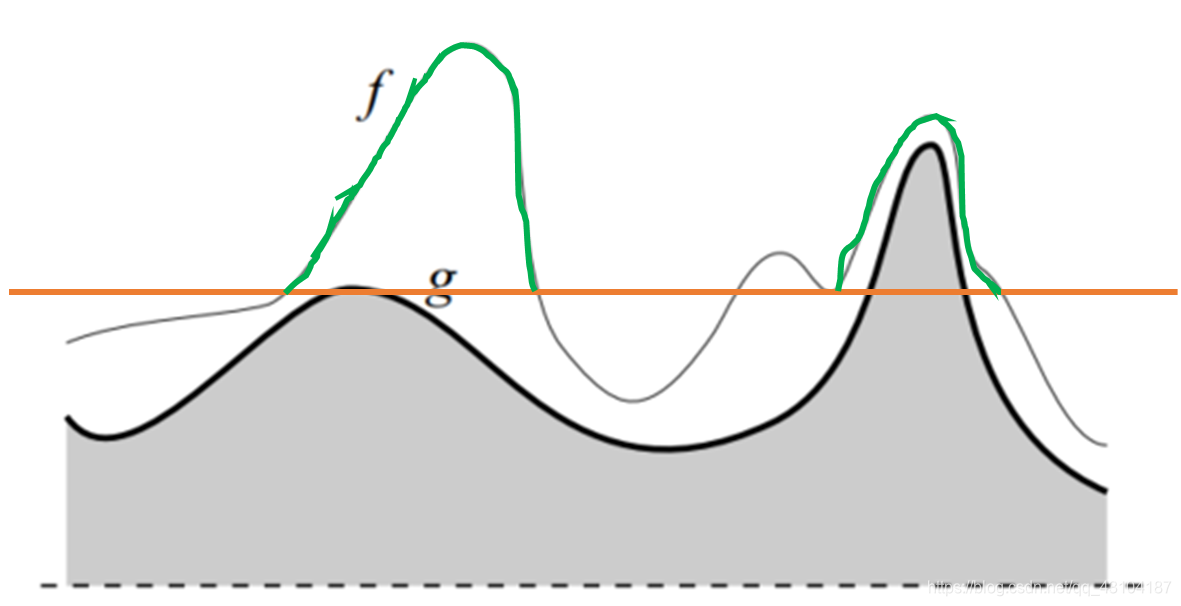
阈值再往上:
阈值再往上:
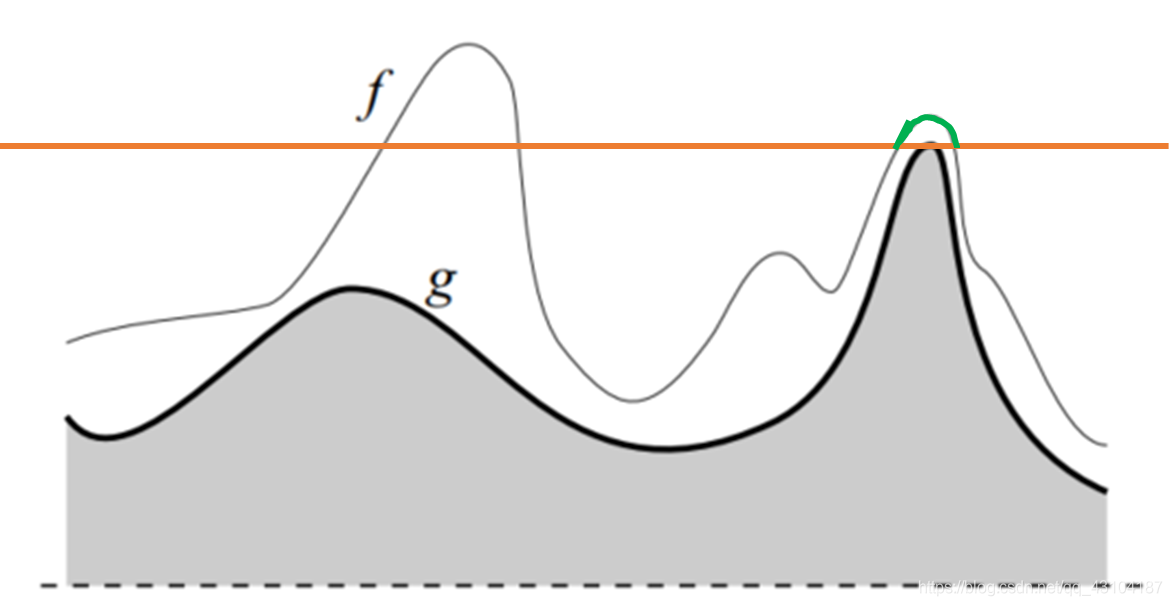
阈值再往上:
没有种子点,无法膨胀,交集为0。
这个max还是没理解,最大的p值???
我是在二值图像中去理解它们的,如果带上本身的阈值呢?
从第一张图像开始分析,
第一张,f 全为1,g全1,本身阈值为f1。那么这一层的重构可以覆盖到全部,重构图的所有点全部赋予f1这个值。
当阈值上升,到 f 的最小的极小值时,这是临界点,再往上种子点的重构无法覆盖到全图像,此时阈值为f2,那么此时最小值点为f2。在第一最小极值点和第二最小极值点之间,根据阈值保留有外轮廓。重构图应该为:
画的有点难看。
阈值继续往上走:
当阈值全部遍历完之后即可得到论文的结果图。
重点
重点
重点
关键点是每一次重构时,两幅图像重构的结果图为1的点赋予这个阈值,其他点保持不变,如此便可计算出最后的结果了。。。
到此概念阶段结束。
论文中的应用实例在下篇博文。

















 2178
2178

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









